 |


Судовая навигационная аппаратура для системы «транзит»
|
|
|
|
В настоящее время существуют различные модификации зарубежной судовой навигационной аппаратуры для системы «Транзит», выпускающиеся фирмами многих стран. Различают два класса аппаратуры: двухканальную и одноканальную. Двухканальная осуществляет прием и обработку информации на обеих частотах — диапазонов 150 МГц и 400 МГц, что позволяет исключить ошибку за счет ионосферной рефракции. Это повышает точность, но значительно увеличивает стоимость аппаратуры, что определяет ее использование в основном для научно-исследовательских, экспедиционных и других судов специального назначения.
В этой связи в дальнейшем будет рассматриваться только одно- канальная судовая навигационная аппаратура, работающая на частоте диапазона 400 МГц.
Основы устройства судовой навигационной аппаратуры. Эта аппаратура должна выполнять следующие функции: поиск и обнаружение сигнала спутника; слежение за сигналом спутника;
прием, декодирование, хранение и обработку эфемеридной информации;
прием навигационного сигнала, выделение доплеровской частоты и интегрирование ее изменения за заданный промежуток времени;
обработку результатов измерений и расчет обсервованного места судна.
Выполнение этих функций требует обязательного наличия в составе судовой навигационной аппаратуры электронной вычислительной машины.
Наличие ЭВМ. создает возможность решения ряда дополнительных задач, облегчающих процесс судовождения. К таким задачам относятся автоматическое счисление, расчеты плавания по локсодромии и ортодромии, запоминание промысловой информации и т. п.
Значительная длительность сеанса измерений требует высококачественного счисления во время сеанса, что вызывает необходимость в лаге и курсоуказателе, информация от которых должна вводиться в аппаратуру автоматически. Все это определяет состав судовой навигационной аппаратуры, в которую должны входить: антенно-фидерное устройство; приемник для приема сигналов спутника;
|
|
|
опорный генератор, необходимый для доплеровских измерений; электронная вычислительная машина; устройство управления; устройство отображения информации;
устройство сопряжения для ввода данных о курсе и скорости от компаса и лага.
Антенно-фидерное устройство. Включает в себя антенну, антенный усилитель и соединительный фидер. Антенна обычно представляет собой четвертьволновый вибратор, у основания которого в горизонтальной плоскости размещается несколько радиальных стержней. Диаграмма направленности антенны сформирована так, чтобы предупредить возможность воздействия сигналов, отраженных от поверхности моря, на сигналы, принятые непосредственно от спутника. Под антенной располагается антенный усилитель. Сигналы с выхода усилителя передаются на вход приемного устройства по высокочастотному фидеру.
Этот же фидер с помощью разделительных фильтров используется для подачи постоянного напряжения питания на антенный усилитель.
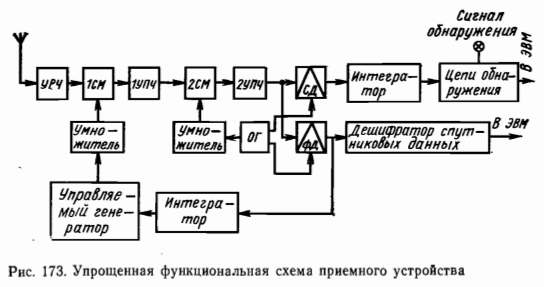
Приемное устройство. Представляет собой, как правило, супергетеродинный приемник с многократным преобразованием частоты. Приемное устройство выполняет поиск и обнаружение сигнала спутника, слежение за ним, прием эфемеридной
информации, выделение Доплеровской частоты и измерение ее изменения за заданный интервал времени.
Рассмотрим на примере приемника аппаратуры «FSN-20C», каким образом выполняются все эти функции.
1. Поиск сигнала. Вследствие влияния эффекта Доплера частота сигнала спутника, принимаемого судовой навигационной аппаратурой, изменяется. Чтобы обнаружить сигнал, необходимо перестраивать приемник в пределах диапазона частот, в котором может оказаться сигнал спутника. Для этого в режиме поиска осуществляется качание частоты настройки приемника. Оно выполняется путем изменения частоты первого гетеродина, которым служит управляемый генератор. Предусматривается два режима поиска. Поиск перед началом сеанса ведется в пределах 10 кГц, от 399 968 кГц до 399 978 кГц. Поиск при потере сигнала спутника в ходе сеанса производится в пределах 5 кГц от частоты, на которой сигнал был потерян.
|
|
|
2. Обнаружение сигнала (см. рис. 172). Сигнал с выхода 2УПЧ попадает на синхронный детектор. На второй вход синхронного детектора подается напряжение опорного генератора, сдвинутое по фазе относительно опорного напряжения фазового детектора на 90°. Сигнал иа выходе синхронного детектора будет пропорционален косинусу фазы входного сигнала. Так как cos (—ф) = cos ф, при попадании на вход синхронного детектора дублетов сигнала спутника (см. рис. 171) его выходное напряжение будет иметь форму меандра (прямоугольных импульсов с интервалами, равными длительности импульса). После интегрирования сглаженное напряжение поступает в цепи обнаружения, срабатывает сигнализация, приемник переходит в режим слежения и сигнал об обнаружении выдается в ЭВМ.
3. Слежеиие. Выполняется цепью фазовой автоподстройки частоты. Сигнал с выхода 2УПЧ приемника и сигнал опорного генератора подаются на входы фазового детектора (см. рис. 173). Сигнал рассогласования с выхода фазового детектора после сглаживания интегратором попадает на управляемый генератор и, изменяя его частоту, настраивает приемник. При срыве слежения до захода спутника включается поиск в полосе 5 кГц, если сигнал от спутника потерян на частоте выше 399 963 кГц. После обнаружения спутника слежение продолжается. Если же сигнал спутника не обнаружен в течение 2,5 мин, происходит переход к поиску в полосе 10 кГц. После окончания слежения в связи с заходом спутника также включается поиск в полосе 10 кГц.
4. Синхронизация. После того как установится режим слежения, начинается синхронизация для обеспечения приема информации, передаваемой спутником. Синхронизация выполняется в три этапа: синхронизация дублетов, синхронизация битов и синхронизация сообщений. При синхронизации дублетов схемой совпадения сравнивается опорный сигнал, формирующийся в аппаратуре, с сигналом, поступающим от синхронного детектора. В случае, если они не совмещены во времени, на выходе схемы совпадения выделяется напряжение рассогласования. Это напряжение после интегрирования управляет фазосдвигателем до тех пор, пока не будет достигнута синхронизация дублетов. Цепи синхронизации битов содержат таймер, осуществляющий задержку начала работы схемы с тем, чтобы синхронизация дублетов произошла до начала синхронизации битов. Специальный детектор цепи синхронизации битов детектирует спутниковые данные и определяет первый дублет пары. Выходной сигнал этого детектора является управляющим сигналом синхронизации битов. Для защиты от помех сигнал до подачи в цепи управления синхронизацией проходит счетчик с коэффициентом пересчета 16. После синхронизации битов происходит синхронизация сообщений. Все сообщение объемом 6103 бита схемой синхронизации сообщений разделяется на 157 слов. Для этого схема отыскивает последние 25 битов второго слова, состоящие из 23 единиц, обрамленных по краям нулями. От этого сигнала счетчик с коэффициентом пересчета 39 делит сообщение на слова, а следующий счетчик с коэффициентом 6 выделяет слова, содержащие информацию, предназначенную для судовой навигационной аппаратуры. Цепи контроля формата выбирают эти 25 слов и выдают их в ЭВМ.
|
|
|
5. Счет числа биений доплеровской частоты. При использовании интервала «Короткий доплер» интегрирование изменения доплеровской частоты производится за 24 с, т. е. двухминутный цикл передачи сообщения спутником делится на пять частей, в течение каждой из которых подсчитывается число биений доплеровской частоты. Доплеровская частота выделяется специальным смесителем как разность частот, сформированных из колебаний опорного генератора и колебаний управляемого генератора. Частота первого колебания постоянна, а второго изменяется пропорционально изменению частоты принимаемого от спутника сигнала. Импульсы, ограничивающие интервал, в течение которого производится счет биений, формируются путем деления частоты управляемого генератора. Этот интервал близок по величине к 24 с, но не постоянен, так как частота управляемого генератора изменяется с изменением частоты приходящего от спутника сигнала. Счетчик подсчитывает число биений за данный интервал и через регистр выдает эту информацию в ЭВМ, где она используется в качестве радионавигационного параметра при определении места судна.
|
|
|
Электронная вычислительная машина судовой навигационной аппаратуры. В современных конструкциях представляет собой микроЭВМ, построенную на базе микропроцессорного комплекта больших интегральных схем. Для хранения констант и программ используется постоянное запоминающее устройство (ПЗУ), конструктивно представляющее собой также БИС. Это исключает необходимость выполнения трудоемкой работы по вводу программ перед началом работы, что было необходимо при использовании прежних образцов аппаратуры. Оперативное запоминающее устройство (ОЗУ) —тоже БИС.
В отличие от ПЗУ, ОЗУ хранит информацию только во время, когда на аппаратуру подано питающее напряжение. При выключении питания информация стирается, и при включении ее надо вводить вновь. Поэтому судовая сеть, питающая аппаратуру, дублируется питанием от аккумуляторных батарей, которые обеспечивают кратковременную (порядка 10 мин) работу при отключении судовой сети. В некоторых образцах современной аппаратуры при отключении сети обеспечивается дублирующим питанием только устройство памяти. Работать с аппаратурой в этом случае до включения сети нельзя, но зато информация сохраняется в памяти длительное время и при включении сети нет необходимости вводить данные вновь.
Устройство управления. Как правило, в качестве устройства управления используется клавиатура. Кроме клавиш цифр и знака числа имеется клавиша ввода информации в ЭВМ. Клавиша ввода обозначается символом Е или ENT (от англ. enter). До нажатия этой клавиши информация хранится в памяти дисплея и может изменяться и стираться. Методы управления судовой навигационной аппаратурой с помощью клавиатуры будут рассмотрены ниже.
Устройства отображения информации. В качестве основного устройства отображения информации в современной аппаратуре применяется дисплей. Дисплеем (от английского display — показывать, воспроизводить) называется устройство визуального отображения информации (в виде текста, таблицы, чертежа и др.) на экране электронно-лучевого прибора. Выдача информации организуется обычно в одном из двух вариантов. В одном одновременно отображается значительное количество информации.
|
|
|
Например, дисплей аппаратуры «Магнавокс-1 102» имеет для этого 10 строк по 24 символа в строке. В другом объем одновременно отображаемой информации невелик, но есть возможность выдать всю необходимую информацию последовательными порциями. Так сделано, например, в аппаратуре «FSN-20C», где дисплей содержит всего три строки, но, нажимая клавишу «NEXT», можно просмотреть до 9 последовательных порций информации. Для обеслечения документирования кроме дисплея в состав комплектов часто включают печатающее устройство. В наиболее современных конструкциях дополнительно применяется графическое отображение информации с помощью графических дисплеев преимущественно телевизионного типа. Вид изображения на экране такого дисплея показан на рис. 173.
Ввод информации о курсе и скорости от компаса и лага. Автоматический ввод информации от курсоуказателя осуществляется путем подключения цепи его выхода на репитер к интерфейсу судовой навигационной аппаратуры. Интерфейсом называется система связей с унифицированными сигналами и аппаратурой, предназначенная для обмена информацией между устройствами вычислительной системы. Необходимый для преобразования напряжения в код аналого-цифровой преобразователь содержится в интерфейсе судовой навигационной аппаратуры. Следует учитывать, что таким путем передается информация только о десятых долях градуса курса. Полное значение курса необходимо вначале ввести вручную, дальнейшие изменения его будут учитываться автоматически. При сопряжении с аппаратурой лага, выдающей информацию о пройденном расстоянии в виде число-импульсного кода например индукционного электронного лага, серьезных проблем не возникает, так как интерфейс содержит преобразователь число-импульсного кода в двоичный. Необходимо только в начале работы ввести вручную масштабный коэффициент данного лага, равный числу импульсов на одну милю пройденного расстояния. При использовании различных типов лагов, выдающих информацию о пройденном расстоянии в виде угла поворота вала, как это имеет место) например, в гидродинамических лагах, необходим дополнительный преобразователь угла поворота вала в число-импульсный код. В настоящее время существуют многочисленные варианты таких преобразователей, в которых используются преимущественно фотосчитывающие устройства или конструкции с герко- нами.
Основные принципы решения навигационной задачи. Решение системы уравнений изолиний прямыми методами, даже при использовании ЭВМ, связано с рядом серьезных трудностей, обусловленных сложностью функциональных зависимостей, необходимостью учета сфероидичности, проблемами отбора истинных корней и громоздкостью обработки избыточной информации. Поэтому применяются косвенные способы с использованием метода последовательных приближений. Из итерационных алгоритмов чаще всего применяется метод Ньютона, при котором производится предварительная линеаризация изолиний (замена их линиями положения) в районе счислимого места. Линеаризованная система уравнений имеет вид:

Система уравнений (XXI—13) решается интеративным путем, т. е. сначала находят поправки к счислимым координатам и получают первые обсервованные значения. Эти значения принимают в качестве счислимых для следующего цикла и так до тех пор, пока поправки не станут меньше величины, определяющейся необходимой точностью решения. При итерационном методе решения задачи важно, чтобы была обеспечена сходимость процесса, т. е. чтобы при итерационных циклах погрешности уменьшались. Для этого должны быть определены пределы первоначально вводимых параметров, при которых обеспечивается надежная сходимость.
При использовании доплеровского метода значительную систематическую ошибку измерений вызывает расхождение частот опорных генераторов. Величина этой ошибки неизвестна, однако в течение сеанса она практически не изменяется. Это позволяет исключить ее путем дополнительного третьего измерения навигационного параметра. Тогда система будет содержать три уравнения с тремя неизвестными. Третьим неизвестным будет систематическая ошибка из-за расхождения частот опорных генераторов AU,
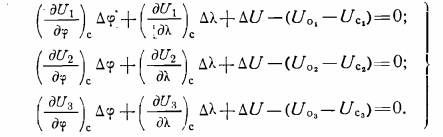
Решение этой системы уравнений позволит получить координаты судна, не содержащие систематической ошибки за счет расхождения частот опорных генераторов.
В течение реального сеанса работы со спутником получают значительное количество избыточной информации, позволяющее применить статистические методы уменьшения случайных ошибок. Для этой цели может быть применен, в частности, хорошо известный метод наименьших квадратов. В этом случае в запоминающем устройстве должны быть собраны все результаты измерений данного сеанса и обработка производится по полной их выборке. Другим способом является обработка по выборке нарастающего объема. При этом методе, получившем название рекуррентного, или метода динамической фильтрации, измерения добавляются последовательно и в каждом цикле обработки применяются однотипные рекуррентные соотношения, что отвечает характеру работы системы с, последовательными измерениями.
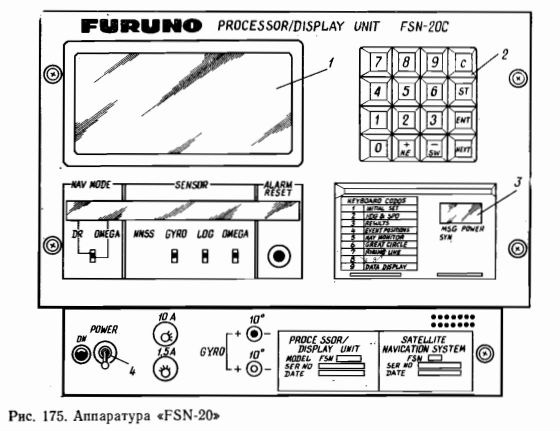
Особенности управления судовой навигационной аппаратурой системы «Транзит». Современная судовая навигационная аппаратура спутниковых систем представляет собой построенные на базе ЭВМ устройства, автоматически выполняющие все операции по поиску, обнаружению и слежению за сигналом спутника, измерениям навигационных параметров,и расчету места судна. Это определяет специфику использования их судоводителем. Работая с такой аппаратурой, судоводитель ведет с ней своеобразный диалог, используя для ввода информации и указаний о режимах работы клавиатуру управления и получая результаты и запросы об уточнении вводимых данных на экране дисплея или ленте печатающего устройства. Внешний вид такой аппаратуры показан на рис. 174 и 175. Естественно, что при диалоге с такой аппаратурой применяется некоторый условный язык кодов и символов, которым судоводитель должен владеть. Однако система кодов несложна, а символы близки к применяющимся в навигации. В качестве примера на рис. 176 приведена таблица основных кодов аппаратуры Мх-1 102. Такая таблица закреплена на передней панели прибора и служит справочным пособием при работе.
Работа с судовой навигационной аппаратурой спутниковой системы начинается с ввода исходных данных, после чего она переходит в режим решения задач, определяемых судоводителем.

Ввод исходных данных. Набор программ ЭВМ аппаратуры предусматривает программу запроса ввода исходных данных. Это избавляет судоводителя от необходимости запоминания перечня исходных данных и последовательности их ввода. Последовательность запросов определяется спецификой программы данного типа аппаратуры и для разных типов может быть различной. Однако состав исходных данных, необходимых для начала работы, как правило, одинаков и в него входят:
счислимые координаты судна. Необходимы для разрешения многозначности и выполнения первого итерационного цикла решения задачи. Разные модификации аппаратуры допускают разную величину ошибки счислимых координат, лежащую обычно в пределах от 1 до 3°. Однако надо учитывать, что чем выше точность введенных счиелимых координат, тем надежнее и быстрее будет сходиться итерационный процесс;
гринвичское время и дата. Гринвичское время должно вводиться с ошибкой, не превышающей 14 мин; тогда при очередном сеансе работы со спутником оно будет автоматически уточнено до одной секунды. Дата, если нет других указаний, должна вводиться по гринвичскому времени;
указание о способе ввода информации от курсоуказателя: автоматическом или вручную. При ручном вводе последует запрос о величине курса, который надо ввести полностью и затем вносить корректуру при каждом изменении курса. При автоматическом вводе потребуется ввести начальное целое число градусов, после чего изменения курса будут вводиться автоматически;
указание о способе ввода информации в аппаратуру от лага: автоматическом или вручную. При вводе вручную последует дополнительный запрос о величине скорости и потребуется при каждом изменении скорости вводить новое значение. При автоматическом вводе дополнительный запрос касается характеристики информации, выдаваемой лагом данного типа, — числа импульсов на одну милю пройденного расстояния;
высота антенны. Реальная поверхность Земли не совпадает с использующимся для расчетов обсервации референц-эллипсоидом. Это требует ввода соответствующих поправок. К некоторым типам аппаратуры придается карта поправок (рис. 177). В этом случае вводить необходимо алгебраическую сумму высоты антенны от ватерлинии и поправки. В более совершенных конструкциях информация о величинах поправок заложена в постоянную память, и вводить необходимо только высоту антенны над уровнем моря. Вариант ввода высоты антенны оговаривается в технической документации к прибору;
поправка курсоуказателя. Вводится с ее знаком. Ввод поправки курсоуказателя предусмотрен не во всех модификациях; в некоторых предполагается учет ее при первоначальном вводе курса.

После ввода исходной информации можно переходить к решению задач. В комплекс решающихся задач входят автоматическое счисление, обсервации по спутникам и дополнительные задачи, свя-
|
|

Рис. 177. Вид карты поправок

занные с выполнением навигационных расчетов, прогнозированием сеансов работы со спутниками, проверкой аппаратуры и т. д. Задачи имеют приоритет, который обычно бывает следующим. При отсутствии команды о решении какой-то определенной задачи ведется автоматическое счисление. Если предусмотрен периодический автоматический контроль технического состояния, он производится в отведенное для этого время, при условии, что это время не совпадает с сеансом работы спутника. Задача спутниковых обсерваций имеет приоритет по сравнению с остальными. Задача прогнозирования спутников решается автоматически по мере накопления информации, и результаты хранятся в запоминающем устройстве. Выполнение задач, связанных с навигационными расчетами, производится по запросу судоводителя. Рассмотрим особенности решения некоторых основных задач.
Автоматическое счисление. Ведется по данным лага и гирокомпаса. Результаты отображаются на дисплее, при этом указываются: время, прошедшее после последней обсервации, координаты счислимого места, гринвичское время, скорость и курс с указанием метода их ввода, величина и направление сноса. Вид информации при автоматическом счислении показан на рис. 178. В верхней строке дисплея индицируется DRT (Dead reckoning time) — время, прошедшее после последней обсервации, в часах и минутах.
Эта величина до некоторой степени характеризует качество счислимых координат, показывая длительность плавания по счислению. В последующих двух строках — координаты счислимого места: LAT (Latitude)—широта и LON (Longitude)—долгота в градусах, минутах и сотых минуты. Под координатами GMT (Greenwich Mean Time) —гринвичское время в часах, минутах и секундах. Ниже—SPEED — скорость в узлах и десятых узла и HDG (Heading) —курс в градусах и десятых градуса. Буква М (Manually) слева от HDG показывает, что данная величина (курс) введена вручную.
При необходимости информация может документироваться печатающим устройством через заданный интервал времени.
Спутниковые обсервации. На экране дисплея либо на устройстве сигнализации отображаются стадии спутниковой обсервации: обнаружение сигналов спутника, слежение и набор информации, вычисление обсервованного места. По окончании вычислений выдается информация о результатах обсервации. В состав этой информации входят обсервованные координаты, гринвичское время и данные, характеризующие качество обсервации (рис. 179). FIX в верхней строке показывает, что приводимые данные относятся к результатам обсервации. Символ N справа в этой же строке указывает на количество предшествующих обсерваций, которые по каким-либо причинам не были приняты для дальнейшего счисления. В показанном на рис. 179 случае (N1) не были приняты данные одной предшествующей обсервации. Ниже, как и при счислении, индицируются координаты и гринвичское время, но относящиеся к результатам обсервации.
Качество обсервации в большинстве современных образцов судовой навигационной аппаратуры, предназначенных для широкого использования, оценивается не количественно (средней квадрати- ческой погрешностью или полуосями эллипса погрешностей), как это обычно принято в судовождении, а комплексом параметров, дающих представление об условиях, в которых обсервация выполнялась. К числу этих параметров относятся угол кульминации спутника, число итераций при решении задачи, число использованных линий положения, невязка со счислимым местом, номер спутника, а также дополнительные сведения о симметричности принятой информации относительно точки кульминации и взаимных помехах между спутниками. Эти параметры выдаются судоводителю и, кроме того, анализируются ЭВМ по критериям, заложенным в программу обработки. Например, во многих модификациях аппаратуры критерием допустимости угла кульминации считается угол в пределах 7—75°, число итераций допускается не более 5, число использованных линий положения не менее 15, невязка не более 20 миль и т. д. Если обсервация удовлетворяет всем критериям качества, она автоматически принимается для дальнейшего счисления. Если же какой-либо из параметров выходит за пределы допуска, об этом выдается сообщение и вопрос о принятии обсервации для дальнейшего счисления оставляется на усмотрение судоводителя. В этом случае судоводитель должен принять решение, оценив всю имеющуюся в его распоряжении информацию о месте судна и о навигационной обстановке в районе плавания.


(3 по соответствующей таблице), вследствие которой обсервация не была принята системой для дальнейшего счисления.
Прогнозирование сеансов работы со спутниками. После того как в памяти судовой навигационной аппаратуры накопится достаточное количество принятой от спутников эфемеридной информации, выполняется прогноз последующих сеансов работы. В прогнозе для каждого спутника указываются время восхода, номер и угол кульминации (рис. 180). В разных модификациях аппаратуры прогнозируется разное количество ближайших сеансов, обычно до 6—9.
На рис. 180 показан экран дисплея, в верхней части которого отображена информация, относящаяся к результатам автоматического счисления, а в нижней — данные прогноза трех ближайших спутников (время восхода, номер и угол кульминации).
Задачи, связанные с выполнением навигационных расчетов. В состав этих задач входят расчеты, связанные с плаванием по дуге большого круга или локсодромии, запоминание информации о промысловой обстановке и т. п. В последнее время судоводители используют возможности программ ЭВМ судовой навигационной аппаратуры спутниковых систем для определения радиодевиации и маневренных элементов судна, определения поправки компаса.
 Контроль работоспособности приемоиндикатора и принципы отыскания неисправностей. Как уже указывалось, во многих модификациях судовой навигационной аппаратуры периодически производится автоматическая проверка с помощью испытательной (тестовой) программы, о чем выдается сообщение на экране дисплея (рис. 181). Такая проверка может быть выполнена также в любой момент по команде оператора. Если в результате проверки обнаружена неисправность, сообщение об этом с указанием номера неисправного блока или номера причины неисправности выдается на дисплей, как это показано, например, на рис. 182. В случае, если результатов проверки недостаточно для обнаружения и устранения неисправности, следует воспользоваться программами логического поиска, входящими в комплект технической документации. Фрагмент такой программы показан на рис. 183. Кроме того, во многих типах аппаратуры предусмотрена возможность запроса величин, характеризующих качество работы, таких, как уровень сигнала на входе приемника, доплеровская частота, изменение доплеровской частоты за заданный интервал времени и т. п.
Контроль работоспособности приемоиндикатора и принципы отыскания неисправностей. Как уже указывалось, во многих модификациях судовой навигационной аппаратуры периодически производится автоматическая проверка с помощью испытательной (тестовой) программы, о чем выдается сообщение на экране дисплея (рис. 181). Такая проверка может быть выполнена также в любой момент по команде оператора. Если в результате проверки обнаружена неисправность, сообщение об этом с указанием номера неисправного блока или номера причины неисправности выдается на дисплей, как это показано, например, на рис. 182. В случае, если результатов проверки недостаточно для обнаружения и устранения неисправности, следует воспользоваться программами логического поиска, входящими в комплект технической документации. Фрагмент такой программы показан на рис. 183. Кроме того, во многих типах аппаратуры предусмотрена возможность запроса величин, характеризующих качество работы, таких, как уровень сигнала на входе приемника, доплеровская частота, изменение доплеровской частоты за заданный интервал времени и т. п.
Это существенно облегчает проверку и поиск неисправностей в ней.
Факторы, влияющие на точность определения места. хуя
хуя
Основные факторы, влияющие на точность определения места при использовании спутниковых систем, можно объединить в следующие группы:
погрешности за счет неточного знания места спутника в момент обсервации;
аппаратурные погрешности судовой навигационной аппаратуры;
погрешности, вносимые влиянием окружающей среды; погрешности из-за неточного знания вектора скорости судна; погрешности в высоте приемной антенны; различие исходных геодезических систем координат; погрешности, определяющиеся геометрией системы. Погрешности из-за неточного знания места спутника в момент обсервации. Зависят от точности определения его траектории наземным комплексом и точности прогнозирования места на моменты наблюдений. Считается, что погрешность места спутника в среднем характеризуется величиной ±30 м и вносит погрешность такого же порядка в определение места судна.
Аппаратурные погрешности судовой навигационной аппаратуры. Определяются такими факторами, как нестабильность опорного генератора, погрешности синхронизации, погрешности следящих систем и т. п. В современных конструкциях аппаратурные погрешности сведены к минимуму и их влияние меньше, чем других факторов.
Погрешности, вносимые влиянием условий окружающей среды. Наиболее существенная составляющая этих погрешностей вызывается влиянием ионосферной рефракции. Для исключения этой погрешности необходимо применение двух- канальной судовой аппаратуры, в которой измерения производятся в диапазонах 400 и 150 МГц. Однако двухканальная судовая аппаратура существенно сложнее и дороже и для целей общего мореплавания удовлетворяются применением одноканальной, в которой погрешность за счет ионосферной рефракции не исключается.
|
Рис, 183. Фрагмент программы логического поиска неисправности |

Влияние остальных факторов, обусловленных окружающей средой,, таких, как отражение радиоволн от морской поверхности, качка судна, атмосферные шумы, уменьшают до допустимых пределов рациональной конструкцией аппаратуры.
Погрешности из-за неточного знания вектора скорости судна. Вследствие длительности сеанса работы со> спутником измерения должны приводиться к одному месту. Для этого необходимо, чтобы во время сеанса велось тщательное автоматическое счисление. Погрешности счисления систематического характера являются основным фактором, ограничивающим точность спутниковых обсерваций. Считается, что в среднем систематическая погрешность определения места составляет величину порядка до 2 кбт на один узел систематической погрешности в скорости судна во время обсервации. Поэтому для реализации потенциальных возможностей спутниковой системы судно должно быть снабжено абсолютным лагом, например доплеровскнм. При использовании любых относительных лагов необходимы систематическая их выверка н тщательный учет всех видов течений.
Погрешность в высоте приемной антенны. Возникает вследствие замены при решении задачи обсервации геоида его приближенной моделью — эллипсоидом вращения. Расхождение между поверхностями этих фигур называется геоидной высотой. Как уже об этом писалось, в некоторых модификациях судовой навигационной аппаратуры эта величина учитывается с помощью специальной карты поправок; в более совершенных образцах поправки содержатся в постоянном запоминающем устройстве и учитываются автоматически. Однако даже при учете поправок возможны погрешности в геоидной высоте порядка 20 м вследствие местных гравитационных аномалий.
Различие исходных геодезических систем координат. При построении навигационных карт в разных странах принимают различные референц-эллипсоиды с разными параметрами. В спутниковой системе, которая по самому принципу своему геоцентрична, принят так называемый общий земной референц-эллипсоид, наиболее близкий к геоиду. Перенос координат, определенных с помощью спутниковой системы, на морскую карту приводит к погрешностям, являющимся следствием различия в принятых моделях Земли. Погрешности будут иметь систематический характер и могут достигать значительных величин. В принципе возможен расчет поправок, в некоторых странах издаются таблицы или карты их величин. Если эти поправки не учитывать, то при переносе результатов спутниковых обсерваций на навигационную карту надо считаться с возможностью возникновения ошибок, вызванных различием исходных геодезических систем координат.
Ошибки, определяющиеся геометрией систе- м ы. Точность определения места при применении интегрального доплеровского метода зависит от угла кульминации спутника. Минимальная ошибка соответствует углам кульминации 30—50°. При малых углах кульминации (меньше 7—10°) точность резко падает из-за уменьшения числа линий положения. При углах кульминации, близких к 90°, все линии положения будут близки к перпендикуляру к трассе спутника и долготу места определить будет невозможно, хотя широта будет получаться с наивысшей точностью.
При полярных орбитах в силу геометрии гиперболической системы, у которой база совпадает с меридианом, точность определения широты будет всегда значительно выше, чем долготы.
$ 68. СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА «НАВСТАР»
Navstar (Navigational Satellite Time and Ranging) переводится как спутник измерения времени и координат. Иначе система «Навстар» называется по ее назначению GPS (Global Positioning System) — глобальная система место- определения.
«Навстар» представляет собой спутниковую систему вторяго поколения, разрабатываемую в США. Это сетевая система, в которой применена сеть навигационных спутников, координированная по движению и излучению сигналов. Система «Навстар» полного состава по первоначальному проекту должна была содержать 24 навигационных спутника, расположенных /равномерно по 8 спутников на трех круговых орбитах высотой около 20 000/км, разнесенных по долготе на 120° и наклоненных на 63° к экваториальной плоскости. Такая конфигурация обеспечивает в любой точке земного шара одновременную видимость от 4 до 11 спутников. Спутники значительно сложнее по устройству, чем в системе «Транзит», больше по весу и габаритам. Масса спутника на орбите 455 кг, площадь солнечных батарей 5 м2. Мощность их более 400 Вт. Срок существования спутника порядка 5 лет. Все спутники сети излучают сигналы одинаковой структуры, предназначенные для измерения дальности и радиальной скорости. Система рассчитана на два вида пользователей, для первого из которых должна быть обеспечена высокая точность и защищенность. Соответственно предусмотрено два типа кодов — код Р (precision — точный) и код С/А (clear acquisition — легко обнаруживаемый). Оба кода передаются на частоте 1575,42 МГц двумя несущими, сдвинутыми на 90°. Для исключения влияния ионосферной рефракции излучается вторая частота 1227,6 МГц, которая модулируется только точным измерительным кодом Р. Служебная информация передается двоичным кодом D на обеих частотах. В состав служебной информации входят эфемеридиая информация, поправка временной шкалы, поправка для учета условий распространения радиоволн и так называемый альманах, содержащий сведения о других спутниках системы, необходимые для выбора созвездия, по которому будет определяться место. Высокая стабильность частоты, необходимая для реализации пассивных измерений дальности, обеспечивается атомным стандартом частоты.
Для решения навигационной задачи необходимо определить время прихода сигналов спутника; место спутника в момент передачи сигналов известно из передаваемого им сообщения. Каждый ряд из четырех измерений времени прихода сигналов позволяет определить четыре независимых переменных: отклонение показаний времени, широту, долготу и высоту. Четвертое измерение может быть исключено, если высота над эталонным сфероидом известна с достаточной точностью. Чтобы обеспечить точные временные отметки (маркеры), разделение принимаемых от спутников сигналов и их обработку, в системе «Навстар» используют модулируемую псевдошумовую структуру сигнала. Псевдошумовая модуляция осуществляется непрерывно, и измерения времени прихода сигналов выполняются путем выравнивания кода псевдошумового генератора приемника с кодом псевдошумового сигнала, принимаемого от спутника. Для с
|
|
|
