 |


Статистические характеристики погрешностей навигационной информации
|
|
|
|
Навигационная информация, получаемая от любого датчика, представляет собой случайную функцию, для большинства датчиков стационарную. Ошибки навигационной информации наиболее полно характеризуются их автокорреляционной функцией или спектральной плотностью. Автокорреляционная функция стационарного случайного процесса показывает изменение степени стохастической связи ошибок в зависимости от изменения интервала между измерениями. Функция спектральной плотности стационарного случайного процесса описывает распределение дисперсии этого процесса по частотам. Функция спектральной плотности стационарного случайного процесса и его автокорреляционная функция связаны между собой прямым и обратным преобразованиями Фурье.
Для большинства датчиков навигационной информации автокорреляционная функция погрешности имеет вид (рис. 184)

§ 70. СПОСОБЫ ОБЪЕДИНЕНИЯ НАВИГАЦИОННОЕ ИНФОРМАЦИИ
Физический смысл комплек- сирования и условия, от которых зависит его эффективность, хорошо иллюстрируются примерами схем компенсации и фильтрации.
Схема компенсации (рис. 185). Обозначим навигационную информацию, поступающую от первого датчика,

где U1 — измеренное значение навигационного параметра; U — истинное значение навигационного параметра; Д| — погрешность измерений первого датчика.
Аналогично информация от второго датчика = Фильтр
Ф стремятся сконструировать так, чтобы он не пропускал погрешность второго датчика Д2 и в минимальной степени искажал погрешность первого датчика Дь Если бы удалось создать идеальный фильтр, который полностью отфильтровал бы погрешность Д2, не искажая при этом погрешности Ai, то на выходе схемы компенсации было бы истинное значение навигационного параметра U. В реальном фильтре часть погрешности Д2 просочится на его выход и несколько изменится погрешность А\. Поэтому выходной сигнал схемы компенсации кроме истинного значения навигационного параметра будет содержать некоторую погрешность А:
|
|
|

Найдем погрешность Д на выходе схемы компенсации. Напряжение с выхода первого вычитающего устройства, поступающее на вход фильтра Ф, представляет собой разность погрешностей первого и второго датчиков:

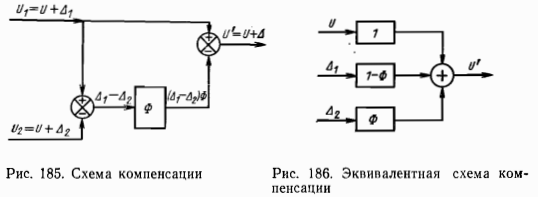
Так как сигнал на выходе фильтра (Ai—Аг)Ф, то сигнал после второго вычитающего устройства (на выходе схемы компенсации):

Выражение (XXII—5) определяет эквивалентную схему, показанную на рис. 186. Из эквивалентной схемы видно, что сигнал, проходя через схему компенсации, не изменяется, а погрешности А? и Л] претерпевают те же изменения, которые произошли бы, если бы они прошли через два взаимно-обратных фильтра соответственно |Ф| и |1—Ф|. Рассмотрим, как эти преобразования влияют на погрешности измерений, для чего определим изменения спектральной плотности погрешностей Ai и Д2 при прохождении через фильтры |Ф| и 11—Ф|.
Из теории случайных функций известна зависимость между дисперсией и спектральной плотностью
Дисперсии погрешностей первого и второго датчиков соответственно:
Спектральная плотность сигнала на выходе фильтра равна произведению спектральной плотности сигнала на входе фильтра на квадрат нормированной амплитудно-частотной характеристики этого фильтра:

Тогда спектральные плотности погрешностей датчиков после фильтров будут:
Следовательно, дислерсия погрешности на выходе схемы компенсации

где S, и S 2(ω) —спектральные плотности погрешностей датчиков навигационной информации; Ф (fω)—нормированная амплитудно- частотная характеристика фильтра.
|
|
|
Формула позволяет, зная спектральные плотности погрешностей навигационных датчиков и амплитудно-частотную характеристику фильтра, оценить величину погрешности на выходе фильтра.
Если спектры погрешностей источников навигационной информации расположены в разных частотных областях, средняя квадратическая погрешность после комплексирования будет существенно меньше, чем у каждой из комплексируемых систем в отдельности. Результат при этом в значительной мере зависит от качества фильтра.
Лучшая оценка навигационного параметра по критерию минимума средней квадратической погрешности будет при применении фильтра, называемого оптимальным. В настоящее время оптимальную фильтрацию осуществляют не аппаратурным, а программным путем, используя входящую в состав комплекса ЭВМ. В качестве оптимальных фильтров в этом случае используют преимущественно фильтры Калмана, представляющие собой рекуррентный метод оценки состояний случайного процесса.
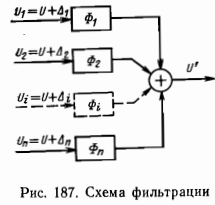 Схема фильтрации (рис. 187). Из рисунка видно, что сигнал на выходе схемы фильтрации
Схема фильтрации (рис. 187). Из рисунка видно, что сигнал на выходе схемы фильтрации

Выражение показывает, что для того, чтобы комплексная система не имела динамических ошибок, то есть не искажала полезный сигнал, должно быть выполнено условие
Вместе с тем из условия видна невозможность построения устройства, сглаживающего информацию одного источника и не вносящего при этом искажений в полезный сигнал. Уменьшение случайных погрешностей без искажения полезного сигнала возможно, когда имеется минимум два источника информации. Если схему фильтрации использовать для объединения информации двух источников, то из выражения видно, что характеристики фильтров должны быть |Ф| и |1—Ф |. Схема фильтрации в этом случае даст тот же результат, что и схема компенсации, но в ней будет два фильтра вместо одного.
| Рис. 187. Схема фильтрации |
Наибольший эффект дает комплексирование автономных систем (систем счисления из курсоуказателя и измерителя скорости или инерциальиых систем) с неавтономными, например радиотехническими, так как спектры их погрешностей лежат в разных частотных областях. Однако такие системы относятся к навигационным комплексам, и вопросы их построения выходят за рамки курса радионавигации.
|
|
|
В последнее время появилась тенденция комплексирования разнородных радионавигационных средств, в частности приемоинди- каторов фазовых и импульсно-фазовых систем, с спутниковой судовой навигационной аппаратурой.
§ 71. КОМПЛЕКСНОЕ ИСПОЛЬЗОВАНИЕ хуя
хуя
|
|
|
