 |


2 Широтно – импульсная модуляция (ШИМ)
|
|
|
|
2 Широтно – импульсная модуляция (ШИМ)
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему инвертора напряжения (рисунок 2. 1).
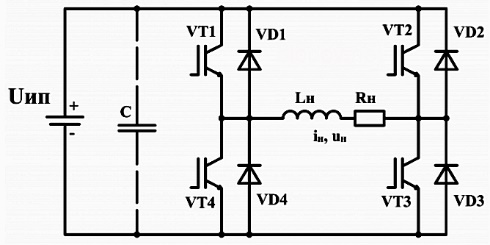
Рисунок 2. 1
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн (Рисунок 1. 8). В следующий момент VT1 и VT3
заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным.
Существует несколько типов ШИМ: однополярная (одноуровневая, рисунок 2. 2), двухполярная (двухуровневая, рисунок 2. 3), трехуровневая (рисунок 2. 4). [1]
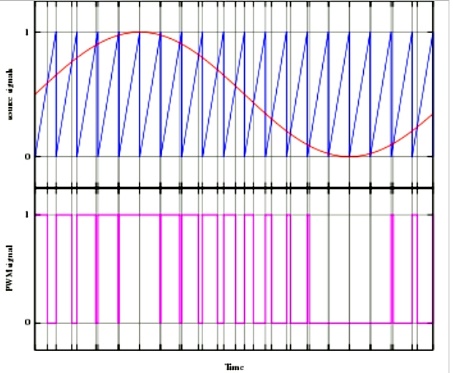
Рисунок 2. 2
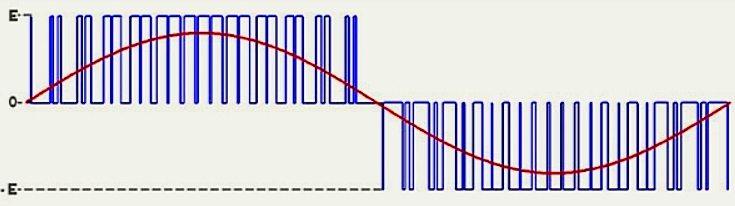
Рисунок 2. 3

Рисунок 2. 4
Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов
формируются длительности импульсов и пауз (рисунок 2. 5), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов. Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
|
|
|
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании (рисунок 2. 6) время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы. [1]

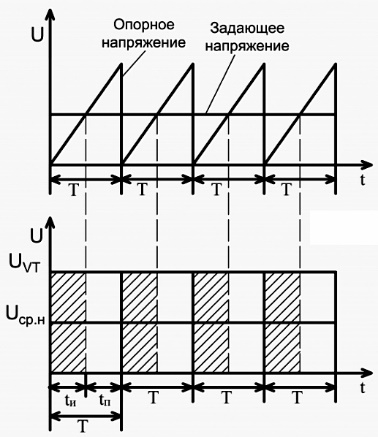
Рисунок 2. 5 Рисунок 2. 6
3 ПИД – регулирование [2]
3. 1 Классификация автоматических регуляторов
Автоматический регулятор изменяет отклонение (сигнал рассогласования)
∆ регулируемой переменной y от заданного значения yзад по определённому закону регулирования и воздействует на регулирующий орган для уменьшения этого отклонения (рисунок 3. 1).
Рисунок 3. 1 - Функциональная схема автоматического регулятора
Автоматические регуляторы классифицируют:
а) по назначению: регуляторы расхода, температуры и т. д.;
б) по зависимости от источника энергии:
1) прямого – перемещение (регулирующий орган отсутствует). Управление происходит за счёт энергии самого измерительного устройства (датчика). Просты и используются в простейших системах: состоит из чувствительного элемента и исполнительного механизма (уровень, температура, давление);
2) непрямого – перемещение регулирующего органа за счёт вспомогательной энергии (в сложных динамических системах);
в) по виду используемой энергии: электрические, пневматические, гидравлические, комбинированные;
г) по конструктивному оформлению:
1) приборные – все основные элементы смонтированы в одном корпусе;
2) агрегатные – состоят из отдельных унифицированных блоков, каждый из которых имеет определённое назначение (позволяет строить схемы любой сложности).
|
|
|
|
|
|
