 |


3.3 Временная характеристика регуляторов непрерывного типа
|
|
|
|
Важнейшей характеристикой регулятора является его временная реакция на управляющее воздействие у при внезапном рассогласовании ∆. С учетом этой временной характеристики регуляторы непрерывного действия можно разделить на три основных типа: П- регуляторы, И-регуляторы, Д-регуляторы.
Пропорциональные регуляторы
Пропорциональный (П)-регулятор немедленно реагирует на внезапное отклонение регулируемой величины ∆ пропорциональным изменением управляющего воздействия u (рисунок 3. 5а).
Отношение изменения управляющего воздействия u к отклонению регулируемой величины ∆ называется пропорциональным коэффициентом
kр: kр = u/∆. Он показывает, во сколько раз увеличилось или уменьшилось рассогласование. Пропорциональный коэффициент kр имеет обычно значения в диапазоне от 0, 1 до 20.
При описании П-регулятора указывается также зона пропорциональности Ар. Эта величина, обратная коэффициенту пропорциональности (XР = 1/kр), показывает, насколько должна измениться регулируемая величина для изменения управляющего воздействия у на весь диапазон регулирования. Зона пропорциональности при этом указывается в процентах (от 5 % до 1000 %).
При выполнении регулировки с помощью П-регулятора новое значение управляющего воздействия у, приводит к новому действительному значению регулируемой величины, также имеющему отклонение от заданного значения.
С П-регуляторами не удается выполнить точную настройку на заданное значение: здесь всегда будет отмечаться некое остаточное рассогласование.
Интегральные регуляторы
Интегральный (И)-регулятор реагирует на скачкообразное отклонение регулируемой величины ∆ постоянно возрастающим управляющим воздействием
|
|
|
u (рисунок 3. 5б).
При этом управляющее воздействие изменяется до тех пор, пока рассогласование полностью не исчезнет. И-регуляторы производят настройку на заданное значение без какого бы то ни было остаточного отклонения.
Дифференциальные регуляторы
Дифференциальный (Д)-регулятор не оказывает собственно регулирующего воздействия. Он действует по принципу упреждающей реакции на отклонение регулируемой величины ∆. Управляющее воздействие у скачкообразно возрастает и медленно возвращается к своей первоначальной реакции (рисунок 3. 5в).
В сочетании с другими основными типами регуляторов Д- регулятор ускоряет их регулирующее воздействие. В промышленных условиях из основных типов регуляторов находит применение только П-регулятор с обратной связью либо без таковой. В остальном же используют регуляторы с комбинированной регулировочной характеристикой.
Пропорционально-интегральные регуляторы
ПИ-регуляторы реагируют сначала немедленным изменением управляющего воздействия uр (П-составляющая), а затем постоянным нарастанием управляющего воздействия uи (И-составляющая) — вплоть до достижения заданного значения регулируемой величины. (рисунок 3. 5г).
Характеристическим параметром ПИ-регулятора является время изодрома Tи. Оно обозначает период, в течение которого ПИ- регулятор еще раз изменяет управляющее воздействие на ту же величину (uр = uи), на которую оно было сразу же увеличено посредством П-составляющей.
Пропорционально-дифференциальные регуляторы
ПД-регуляторы согласно своей Д-составляющей немедленно реагируют на рассогласование значительным изменением управляющего воздействия, которое затем возвращается к постоянной величине (П- составляющая) (рисунок 3. 5д).
ПД-регулятор не способен производить настройку на заданное значение. В связи с этим он почти не используется.
|
|
|
Характеристическим параметром ПД-регулятора является время предварения Tп. Это период, в течение которого чистый П-регулятор должен был бы реагировать раньше, чтобы изменить управляющее воздействие таким же образом, что и ПД-регулятор.
Пропорционально-интегрально-дифференциальные регуляторы
ПИД-регуляторы сочетают в себе свойства трех основных типов регуляторов (рисунок 3. 5е): немедленное и значительное изменение управляющего воздействия при отклонении регулируемой величины от заданного значения (Д-воздействие), быстрая обратная связь с возвращением к изменению управляющего воздействия соразмерно рассогласованию (П-составляющая) и последующая тонкая настройка на заданное значение без остаточного отклонения (И-составляющая).
По истечении установленного времени (времени Д-предварения) ПИД-регулятор обладает характеристикой ПИ-регулятора. Для эффективной регулировки температуры ПИД-регулятор признан самым подходящим из всех прочих типов. Для наглядности можно сравнить регулировочную характеристику ПИД-регулятора с поведением опытного автомобилиста в случае внезапного появления препятствия на его пути. Сначала он реагирует резким и стремительным изменением направления, поле чего быстро «рулит» в противоположную сторону, приводя в конечном итоге (после заключительной корректировки) свой автомобиль в нужное положение.
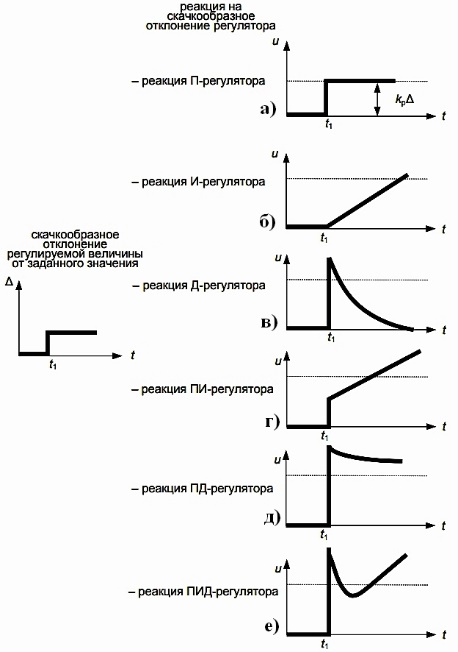
Рисунок 3. 5
|
|
|
