 |


3.2 Законы регулирования
|
|
|
|
В зависимости от характера сигнала рассогласования ∆, регулятор отрабатывает тот или иной вид выходного регулирующего сигнала u, используемого для регулирующего воздействия на ОУ. Характер этого воздействия называют законом регулирования.
По характеру воздействия на регулирующие органы различают регуляторы:
1) дискретного;
2) непрерывного действия.
Регуляторы дискретного действия
Регуляторы дискретного действия: релейные и импульсные.
Релейный закон регулирования (двухпозиционный) – самый простой. В них регулирующий орган перемещается через определенные промежутки времени и изменяет свое положение
(«открыто»– «закрыто»; «min» –«max»), т. е. позиционными. Применение: при малом τ и большой Т объекта управления.
Импульсный регулятор: содержит импульсный элемент, преобразующий непрерывное изменение регулируемой переменной в ряд им- пульсов, следующих друг за другом через определенные промежутки времени.
Применение: для процессов с большим τ и Т (т. е. инерционными).
Регуляторы непрерывного действия
Регуляторы непрерывного действия в зависимости от регулируемого закона управления подразделяются: П – пропорциональные, И – интегральные, ПИ – пропорционально-интегральные; ПИД – пропорционально-интегрально-дифференциальные.
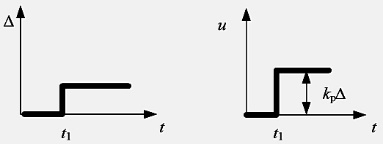
П-регулятор (статический регулятор): положение регулирующего органа пропорционально величине отклонения ∆ регулируемой переменной y от заданного значения узад (рисунок 3. 2).
u= – kp·∆
kp – коэффициент передачи регулятора (параметр настройки регулятора), т. е. сигнал отклонения ∆ приводит к изменению u в обратном направлении.
Передаточная функция П-регулятора
|
|
|
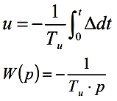
Wп(р)= – kp.
Достоинства: быстродействие (т. е. малое время переходного процесса), высокая устойчивость процесса регулирования.
 Недостатки: основной – наличие остаточного отклонения регулируемой переменной (т. е. его невысокая точность).
Недостатки: основной – наличие остаточного отклонения регулируемой переменной (т. е. его невысокая точность).
Рисунок 3. 2
И-регулятор (астатический): скорость перемещения регулирующего органа пропорциональна величине отклонения регулируемой переменной от заданного значения
du/dt = (1 /Ти)·∆,
где Tи – (параметр настройки регулятора) постоянная времени интегрирования (время изодрома): время за которое регулирующий орган
перемещается из одного крайнего положения в другое при максимальных отклонения регулируемой переменной от заданного значения.
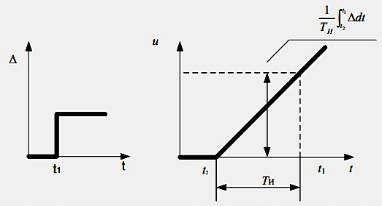 Достоинства: точен, но процесс регулирования медленен. Используется для ОУ с большими Т, малыми τ и небольшими отклонениями (рисунок 3. 3).
Достоинства: точен, но процесс регулирования медленен. Используется для ОУ с большими Т, малыми τ и небольшими отклонениями (рисунок 3. 3).
Рисунок 3. 3
ПИ-регулятор (изодромный): при отклонениях регулируемой переменной от заданного значения РО вначале перемещается пропорционально отклонению (как П-регулятор), а затем при приближении регулируемой переменной к заданному значению медленно доводит её до этого значения (как И-регулятор).
Достоинства: точность (И-регулятор) и быстродействие (П- регулятор).
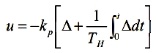
kр – коэффициент передачи регулятора, Ти – время изодрома
 (оба параметра – настройки регулятора). Передаточная функция
(оба параметра – настройки регулятора). Передаточная функция
ПИД-регулятор: регулирующий орган перемещается пропорционально отклонению (∆ ), интегралу отклонения ( ∫ ∆ dt ) и скорости отклонения ( d∆ /dt ) регулируемого параметра (рисунок 3. 4).

Тп – время предварения; kр, Ти, Тп – параметры настройки регулятора.
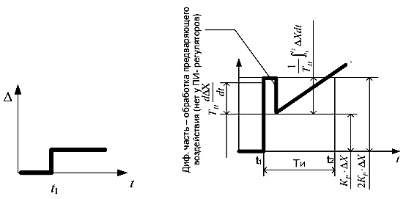
Рисунок 3. 4
Наиболее сложны (по устройству). Применяется для ОУ: большие τ, требования к отсутствию статической ошибки.
|
|
|
