 |


4.4. Выбор 3D сканера. 4.5. Используемые компоненты. 4.6. Подбор комплектующих. 4.6.1 Подбор шагового двигателя
|
|
|
|
4. 4. Выбор 3D сканера
Для дипломного проекта выбран 3D-сканер Ciclop. Этот тип сканера использует лазерную триангуляционную технологию сканирования. Внешний вид 3D-сканера представлен на рисунке 4. 4. 1.

Рисунок 4. 4. 1 – Лазерный 3D сканер Ciclop
Он позволяет сканировать объект и получать его цифровую модель, которую можно будет редактировать и использовать для 3D печати. Объект помещается на вращающуюся платформу. При вращении платформы, два линейных лазера освещают объект с двух противоположных углов. Затем камера сканирует освещаемый объект. Данные камеры используются для построения 3D облака точек объекта.
Краткая характеристика 3D сканера представлена в таблице 4. 4. 1.
Таблица 4. 4. 1 – характеристика 3D сканера Ciclop
| Наименование сканера | Область сканирования | Точность сканирования | Стоимость |
| BQ Ciclop | 205 мм | 0. 5-5 мм от размеров детали | 8164 руб. |
По сравнению с промышленными сканерами, стоимость 3D сканера не высокая и является одним из доступных для приобретения. Такой сканер предназначен для сканирования не больших объектов, например, художественных фигурок или небольших деталей, для последующей печати на 3D принтере или получения 3D модели для использования при проектировании.
4. 5. Используемые компоненты
а) Контроллер Arduino Nano;
б) Веб камера Logitech C270;
в) Два лазера 650nm 5mW Red Laser Line Module (12х36 мм);
г) Драйвер шагового двигателя A4988;
д) Шаговый двигатель Nema 17 (1. 7А 1, 8 град/шаг);
е) Конденсатор 100 Мкф 35В;
ж) Резистор 10К;
з) Блок питания 12В 1, 5А;
и) Шариковый подшипник 16014;
к) Ø 200 x 8 мм круглая база;
л) Ø 200 мм нескользящее покрытие;
м) Шпильки М8;
н) Гайки М8;
|
|
|
о) Шайбы М8;
п) Винты и гайки М3;
р) Набор пластиковых деталей;
с) Прямоугольный шахматный паттерн.
4. 6. Подбор комплектующих
4. 6. 1 Подбор шагового двигателя
Двигатели разработаны для применения в механизмах, где детали поворачиваются точно на требуемый угол. Вращение вала шагового двигателя состоит из малых перемещений – шагов. Шаговый двигатель NEMA 17 имеет плиту размером 1. 7 x 1. 7 дюйма (рисунок 4. 6. 1), он имеет больший крутящий момент по сравнению с другими аналогичными шаговыми двигателями меньшего размера, например, NEMA 14. Данный двигатель имеет 6 подводящих проводов и работает от напряжения 12 В. Он может работать и от напряжения меньшей величины, однако при этом соответствующим образом будет уменьшаться и его крутящий момент.

Рисунок 4. 6. 1 – Шаговый двигатель NEMA 17
При каждом шаге ось двигателя NEMA17 поворачивается на угол, равный 1. 8 градуса. Схема расположения подводящих проводов двигателя NEMA17 представлена на рисунке 4. 6. 2.
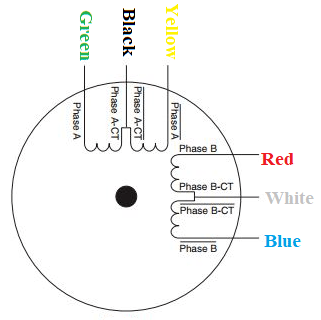
Рисунок 4. 6. 2 – Схема расположения подводящих проводов
Шаговый двигатель NEMA17 имеет униполярное расположение 6 проводов. Эти провода подсоединены к двум раздельным обмоткам. Черный, желтый и зеленый провода подключены к первой обмотке, а красный, белый, и синий провода – к другой обмотке. В обычном режиме центральные провода обмоток (черный и белый) оставляют неподключенными.
Число шагов за оборот для двигателя NEMA17. Число шагов за полный оборот (Steps per Revolution) для каждого определенного шагового двигателя рассчитывается с помощью угла, на который поворачивается шаговый двигатель за один шаг (step angle). Для двигателя NEMA17 этот шаг равен 1. 8 градуса:
Steps per Revolution = 360/ step angle
360/1. 8 = 200 Steps Per Revolution
Технические характеристики двигателя Nema 17;
1) рабочее напряжение: 12V DC (12В постоянного тока);
2) угол за один шаг (Step Angle): 1. 8 градуса;
3) 200 шагов за один полный оборот;
|
|
|
4) число фаз: 4;
5) длина двигателя: 1. 54 дюйма;
6) диапазон рабочих температур: от -10 до 40 °C;
7) удерживающий крутящий момент: 22. 2 oz-in.
|
|
|
