 |


Основные свойства нелинейных систем
|
|
|
|
Основные отличия нелинейных систем от линейных: они по-разному реагируют на сигналы разных величин  , принцип аддитивности не работает
, принцип аддитивности не работает  , система меняет коэффициент усиления в зависимости от входного сигнала, возникают автоколебания как признак неустойчивости линеаризованной модели, а также имеется скачкообразный резонанс:
, система меняет коэффициент усиления в зависимости от входного сигнала, возникают автоколебания как признак неустойчивости линеаризованной модели, а также имеется скачкообразный резонанс:

Используется несколько методов исследования нелинейных систем: метод гармонический линеаризации для исследования систем любого порядка, являющий приближенным, метод фазовых плоскостей, являющийся точным, но ограниченный вторым порядком системы, а также метод численного интегрирования нелинейного дифференциального уравнения, описывающего систему.
Основные типы нелинейностей.
Зона насыщения или Saturation:


Зона нечувствительности или Dead zone:


Переменный коэффициент усиления:


Люфт:

Двухпозиционное реле:


Трехпозиционное реле:


Двухпозиционное реле с гистерезисом:


Трехпозиционное реле с гистерезисом:


Понятие фазовой плоскости, фазовой траектории и фазового портрета.
Система автоматического управления может быть описана системой из n уравнений 1-ого порядка:  с нулевыми начальными условиями. Переменные
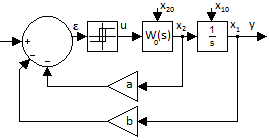
с нулевыми начальными условиями. Переменные  можно рассматривать как координаты некоторой точки в n-мерном пространстве. При изменении координат эта точка описывает некоторую кривую, называемую фазовой траекторией. Совокупность таких траекторий, полученных при различных начальных условиях, называется фазовым портретом системы. Наглядно представить фазовый портер можно только для систем не выше второго порядка. Исследование систем методом фазовой плоскости (то есть рассмотрения фазового портрета системы) возможно только для систем, у которых в правой части нет в явном виде переменной времени (автономных систем). Тогда для системы второго порядка можно составить блок-схему:
можно рассматривать как координаты некоторой точки в n-мерном пространстве. При изменении координат эта точка описывает некоторую кривую, называемую фазовой траекторией. Совокупность таких траекторий, полученных при различных начальных условиях, называется фазовым портретом системы. Наглядно представить фазовый портер можно только для систем не выше второго порядка. Исследование систем методом фазовой плоскости (то есть рассмотрения фазового портрета системы) возможно только для систем, у которых в правой части нет в явном виде переменной времени (автономных систем). Тогда для системы второго порядка можно составить блок-схему:
|
|
|

Для случая, где  :
:

 .
.
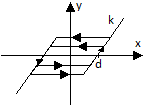
1.  ;
;  – семейство траекторий:
– семейство траекторий:
2.  – семейство траекторий:
– семейство траекторий:
Ошибка  , из этого можно получить формулу линии переключения, которая имеет место при ошибке, равной нулю:
, из этого можно получить формулу линии переключения, которая имеет место при ошибке, равной нулю:  ;
;  .
.
Например, при  и
и  :
:
При  (отсутствие ООС) линия переключения будет вертикальной.
(отсутствие ООС) линия переключения будет вертикальной.
12. Фазовые траектории, соответствующие свободному движению объекту с заданной передаточной функцией: 1/s^2; 1/s(Ts+1); 1/s(Ts-1)
Для случая, где – перепиши, начиная с блок-схемы, с предыдущего билета.
Для случая, где  :
:
 ,
,  ,
, 
 ,
,  . Для траектории будут иметь вид:
. Для траектории будут иметь вид:
Для  траектории будут иметь вид:
траектории будут иметь вид:
Для случая  (например, неоднозначные нелинейности) формула приобретает вид
(например, неоднозначные нелинейности) формула приобретает вид  , то есть прямой линии с наклоном T.
, то есть прямой линии с наклоном T.
В случае неоднозначных нелинейностей линии переключения определяются формулой  (сигнал ошибки равен
(сигнал ошибки равен  ). Например, при
). Например, при  :
:
Такое состояние системы называется скользящим режимом. Для  выведи сам.
выведи сам.
13. Фазовые траектории вынужденного движения объекта с заданной передаточной функцией для управляющего сигнала  .
.
Все то же самое, что в предыдущем билете, кроме линий переключений. Сигнал ошибки становится  , где
, где  – входной сигнал, например единичная ступенька. В этом случае линия переключения будет равна
– входной сигнал, например единичная ступенька. В этом случае линия переключения будет равна  . Для неоднозначной нелинейности приравниваем сигнал ошибки для определения линий переключения:
. Для неоднозначной нелинейности приравниваем сигнал ошибки для определения линий переключения:  , для единичной ступеньки линии переключения будут такими:
, для единичной ступеньки линии переключения будут такими:  .
.
Фазовые портреты системы, содержащих однозначные нелинейности.
Вся информация есть в 12 билете. Для однозначных нелинейностей фазовый портрет характеризуется однозначными линиями переключения (если кривая пересекает линию, она обязательно сменит характер движения).
|
|
|
Построение фазовых портретов систем, содержащих неоднозначные кусочно-линейные статические характеристики.
Вроде как снова 12 билет?
|
|
|
