 |


Рис. 115. Условия самовращения лопасти
|
|
|
|
Рис. 115. Условия самовращения лопасти
Уменьшение общего шага менее 4º приводит к смещению точки А в сторону концевых сечений, т. е. расширяется зона ускоренного самовращения, обороты несущего винта возрастают.
Увеличение общего шага более 4º приводит к смещению точки А в сторону комлевых сечений, т. е. расширяется зона замедленного самовращения, обороты НВ уменьшаются.
В целом лопасть будет находиться в условиях установившегося самовращения, когда сумма ускоряющих и замедляющих сил на ней будет равна 0.
При вертикальном снижении на режиме самовращения лопасти несущего винта работают в одинаковых условиях и режим их работы будет зависеть от выбранного значения ОШ.
Используя график запаса самовращения можно получить и проанализировать в каких условиях работает в целом лопасть винта, в том числе и с учетом геометрической крутки (рис. 116).

Рис. 116. График запаса самовращения для лопасти
При планировании на РСНВ (снижение по наклонной траектории) за счет эффекта косого обтекания возрастает тяга НВ, следовательно VУсн. будет меньше, чем при вертикальном снижении. Однако в этом случае условия самовращения элементов и распределение зон ускоренного и замедленного самовращения на лопастях существенно изменяются в зависимости от азимута (рис. 117).
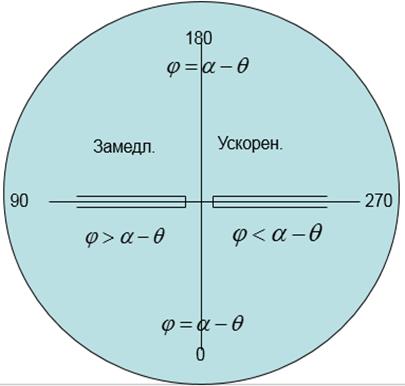
Рис. 117. Условия самовращения несущего винта
С учетом перераспределения по азимуту углов атаки за счет изменения воздушных скоростей обтекания, работы регулятора взмаха и автомата перекоса, лопасть в азимуте 90º работает в условиях замедленного самовращения (φ Э > α Э – θ ). Следовательно, летчик может перераспределять размеры зон ускоренного и замедленного самовращения и регулировать обороты НВ не только общим шагом, но и изменяя угол атаки НВ с помощью ручки управления.
|
|
|
Вращающийся несущий винт должен также обеспечивать вращение рулевого винта и различных агрегатов, преодолевая при этом силы трения в трансмиссии, т. е.
МНВ = МРВ + МАГР + МТР. (7. 3)
Проводя интегрирование (суммирование) элементарных моментов, находим момент самовращения лопасти:
 (12. 3)
(12. 3)
где п – количество элементов;
dRX0i – элементарные проекции dRэ на плоскость вращения;
ri– радиусы элементов до оси вращения.
Итак, момент самовращения лопасти равен сумме элементарных моментов, создаваемых ее отдельными частями.
Момент самовращения несущего винта в целом определяется по формуле
МY РСНВ = k∙ МСВ лоп, (12. 4)
где k – количество лопастей.
На валу НВ момент самовращения необходимо сравнить с моментом сопротивления. И только в случае равенства этих моментов обороты НВ будут неизменными.
На режиме самовращения силовая установка не работает. Крутящий момент не подводится. Но летчику удалось за счет снижения сохранить вращательное движение НВ. И теперь НВ сам является силовой установкой. Он должен не только вращаться сам, но и через редуктор вращать рулевой винт, агрегаты, преодолевать сопротивление трения, т. е. делать все, чтобы вертолет остался управляемым. Дело теперь за малым. Управляемый и исправный, с некоторой натяжкой – ведь двигатели не работают, вертолет надо посадить.
Чему же равен момент сопротивления? Для его нахождения определим потребную мощность на валу НВ при неработающих двигателях. Это 2 % мощности от Ne, расходуемой на преодоление трения в главном редукторе, 0, 5 % мощности, расходуемой на трение в редукторе РВ, 1 – 1, 5 % на вращение РВ на jРВ = – 2°(определяется по поляре РВ), до 1% на привод агрегатов.
|
|
|
Суммарная мощность на РСНВ составит: 3-4% от Ne.
В результате наших рассуждений выявляется, что на режиме самовращения на преодоление сопротивления вращению необходимо лишь 3, 35 % Ne. То есть НВ должен быть, как минимум, адекватен силовой установке, мощностью 0, 0335 Ne.
Зная, что
 а
а 
находим момент сопротивления вращению на РСНВ.
Следовательно, если МY РСНВ больше чем определенная расчетная величина, то обороты НВ растут, если меньше – то наоборот, падают.
Меняя ОШ, меняя тем самым VY, а значит α э, летчик может менять условия работы элементов и добиваться либо ускоренного, либо замедленного вращения НВ в целом.
При снижении по наклонной траектории условия обтекания лопастей сильно меняются. На наступающей лопасти окружные скорости, суммируясь с частью поступательной скорости, уменьшают углы атаки элементов, на отступающей наоборот – увеличивают. Как результат: наступающая лопасть становится тормозящей, а отступающая лопасть – тянущей.
Таким образом, режим самовращения возможен как при снижении вертолета по вертикали, так и при планировании вертолета по наклонной траектории.
Момент МНВ передается через вал винта на фюзеляж вертолета и стремится повернуть его в сторону вращения несущего винта, т. е. на РСНВ, в связи с отсутствием крутящего момента от двигателей, реактивный момент НВ отсутствует, но появляется момент несущего винта МНВ – увлекающий, требующий для своего уравновешивания изменения направления тяги рулевого винта.
|
|
|
