 |


Регулирование частоты вращения
|
|
|
|
Для получения наибольшей производительности, точности обработки или иных показателей исполнительный орган производственного механизма должен вращаться или перемещаться поступательно с соответствующей этому оптимальному режиму скоростью. В связи с этим возникает необходимость принудительного регулирования скорости исполнительного органа в соответствии с технологическими требованиями. В недалеком прошлом регулирование скорости осуществлялось с помощью коробок скоростей, механических вариаторов и т. п.
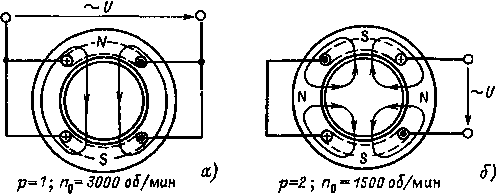
Рис. 10.25 Схема соединения обмотки статора двухскоростного асинхронного двигателя при двух ( а ) и четырех ( б ) полюсах
Перечисленные способы имеют ряд существенных недостатков, одним из которых является усложнение кинематики механизма, другим — ступенчатое регулирование и т.п. По этой причине в настоящее время стали широко использовать регулировочные свойства двигателя — регулирование скорости механизма путем изменения частоты вращения двигателя, что привело к значительному упрощению кинематики устройства и управления, удешевлению механизма, осуществлению плавного регулирования скорости.
Рассмотрим вначале возможные способы регулирования частоты вращения ротора асинхронного двигателя с короткозамкнутым ротором. Как известно, частота вращения ротора в нормальном режиме работы несколько меньше (на 2 — 8%) частоты вращения магнитного поля. Поэтому изменение частоты вращения магнитного поля вызывает изменение в той же степени и частоты вращения ротора двигателя.
Из выражения частоты вращения магнитного поля
n 0 = 60 f 1/ р
вытекают два наиболее распространенных способа регулирования частоты вращения 1) изменением числа пар полюсов р; 2) изменением частоты f 1 напряжения источника
|
|
|
Регулирование изменением числа пар полюсов осуществляется изменением схемы соединения обмотки статора с помощью переключателя. Обмотка каждой фазы двухскоростного асинхронного двигателя состоит из нескольких частей, которые соединяются между собой параллельно или последовательно. В результате образуются разные числа пар полюсов. На рис 10.25, а изображена обмотка одной фазы статора, имеющая две части, которые соединены между собой параллельно, на рис 10.25, б — последовательно.
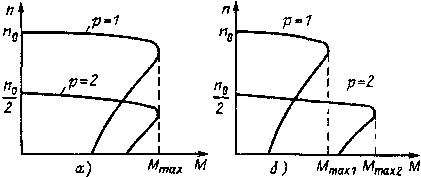
Рис. 10.26 Механические характеристики двухскоростного асинхронного двигателя с короткозамкнутой обмоткой ротора с постоянным моментом Мmax ( а ) и постоянной мощностью ( б )
Рассмотрев картины магнитного поля, созданного током обмотки одной фазы статора для какого-то момента времени, легко убедиться, что на рис. 10.25, а обмотка образует р = 1, а на рис. 10.25, б - р = 2 пар полюсов. Обмотки статора двух других фаз, сдвинутые в пространстве на электрический угол в 120°, соединяются так же, как и первая. Результирующее магнитное поле, естественно, будет иметь столько же пар полюсов, сколько и поле, созданное одной фазой обмотки. Необходимо заметить, что никаких переключений обмотки ротора не производится: ток обмотки ротора всегда образует столько пар полюсов, сколько их создано обмоткой статора. Рассмотренный способ дает возможность получить только две скорости, отличающиеся по значению в 2 раза, что является его существенным недостатком.
Отечественная промышленность выпускает двухскоростные асинхронные двигатели со следующими частотами вращения магнитных полей: 3000/1500; 1500/750; 1000/500 об/мин и др. Механические характеристики двухскоростного двигателя изображены на рис. 10.26. Значения максимальных моментов будут равными (рис. 10.26, а), если равны магнитные потоки двигателя для первого и второго способов соединения обмоток, в противном случае (рис. 10.26, б) они не равны. Как следует из выражения
|
|
|
U 1ф ≈ E 1ф = 4,44 w 1 f 1Ф k 01,
магнитные потоки будут равными, если остается неизменным отношение U 1ф/ f 1 для первой и второй схем соединения обмоток.

Рис. 10.27. Структурная схема частотного регулирования скорости асинхронного двигателя с короткозамкнутым ротором с машинным ( а ) и статическим ( б ) преобразователями частоты
Трехскоростные и четырехскоростные двигатели имеют по две независимые обмотки статора, одна из которых образует две скорости, а другая в трехскоростном двигателе — одну, в четырехскоростном двигателе — две скорости. Могут быть двигатели со следующими частотами вращения n 0: трехскоростные - 1500/1000/750, 1000/750/500 об/мин; четырехскоростные - 3000/1500/1000/500, 1500/1000/750/500 об/мин.
Для регулирования частоты вращения ротора изменением частоты тока статора необходимо иметь отдельный источник или преобразователь энергии с регулируемой частотой. До последнего времени в качестве источника энергии использовались синхронные, асинхронные или индукционные генераторы. При этом установка (рис. 10.27, а) состояла из нескольких машин: приводного асинхронного или синхронного двигателя 1, работающего с постоянной частотой вращения синхронного генератора 2, механического или электрического регулятора скорости 3, асинхронного двигателя 4 и исполнительного механизма 5. Частота f 1 напряжения в обмотке статора синхронного генератора равна
f 1 = рn /60.
При изменении частоты вращения синхронного генератора изменяется частота f 1 и, следовательно, частота вращения ротора асинхронного короткозамкнутого двигателя 4 и исполнительного механизма 5. На рис. 10.28 изображены механические характеристики асинхронного двигателя при частотном регулировании скорости. Предполагается, что с изменением частоты в такой же степени изменяется и напряжение, а их отношение U 1ф/ f 1остается постоянным. Такой способ позволяет получить широкий диапазон и плавное регулирование частоты вращения, однако он имеет плохие технико-экономические показатели: низкий КПД, большие капитальные вложения и т. п., поэтому применяется редко.

Рис. 10.28. Механические характеристики асинхронного двигателя при частотном регулировании скорости
|
|
|
В настоящее время разработаны статические преобразователи частоты на тиристорах, обладающих высокими технико-экономическими показателями. Структурная схема такой установки изображена на рис. 10.27, б. Здесь 1 — статический преобразователь, 2 — асинхронный двигатель, 3 — исполнительный механизм.
Существуют также другие, мало распространенные способы регулирования частоты вращения короткозамкнутого двигателя, например изменением напряжения на обмотке статора. В качестве регулятора используется индуктивное регулируемое сопротивление, включенное в цепь обмотки статора (например, силовой магнитный усилитель).
Регулирование частоты вращения ротора асинхронного двигателя с фазным ротором в большинстве случаев осуществляется путем введения в цепь обмотки ротора дополнительного сопротивления (см. рис. 10.23).
Как следует из (10.55) и (10.56), добавочное сопротивление в цепи обмотки ротора увеличивает критическое скольжение s кр и не влияет на значение максимального момента M max. Искусственные (реостатные) характеристики двигателя рассчитывают с помощью уравнения (10.62).
На рис. 10.29 сплошными линиями изображены естественные и искусственные механические характеристики асинхронного двигателя для различных значений добавочных сопротивлений в цепи обмотки ротора. Из кривых следует, что при заданном моменте на валу М с частота вращения ротора на каждой механической характеристике будет разной (п 1, n 2, n 3).

Рис. 10.29. Естественные и искусственные (реостатные) механические характеристики, а также зависимости тока ротора от скольжения асинхронного двигателя с контактными кольцами
ля выбора регулировочного и пускового реостатов по нагреву необходимо знать значения токов в роторной цепи двигателя. Для определения тока используют тот факт, что ток ротора определяется моментом двигателя и не зависит от значения добавочного сопротивления в цепи обмотки ротора. Например, моменту М с (рис. 10.29) на естественной и искусственной характеристиках соответствует один и тот же ток I 2с. Это положение можно доказать аналитически.
|
|
|
Момент, развиваемый двигателем, равен:
на естественной характеристике
| M = | 3 I 22 r 2 | , |
| ω0 s |
на искусственной характеристике
| M и = | 3 I 2и2(r 2 + r д) | . |
| ω0 s и |
Допустим, что М = М и = М с. Тогда
| 3 I 22 r 2 | = | 3 I 2и2(r 2 + r д) | , |
| ω0 s | ω0 s и |
или
| I 22 | = | s | (r 2 + r д) | , | |
| I 2и2 | s и | r 2 |
Выразив s/sи через сопротивления цепи ротора, получим
| I 22 | = | r 2(r 2 + r д) | = 1. |
| I 2и2 | (r 2 + r д) r 2 |
К недостаткам реостатного способа регулирования частоты вращения относятся значительные потери энергии в регулировочном реостате, малая жесткость механических характеристик: небольшое изменение момента на валу вызывает значительное изменение частоты вращения, а также невозможность получения плавного регулирования. Рассмотренный способ используется в системах, где работа на реостатных характеристиках непродолжительна.
Пример 10.2. Рассчитать и построить естественную и искусственную механические характеристики, а также зависимости тока ротора от скольжения асинхронного двигателя с фазным ротором при r д = 0,08 Ом.
Паспортные данные двигателя: Р ном = 60 кВт, n ном = 720 об/мин, Mmax /M ном = λ = 2,2, E 2к = 175 В, I 2ном = 216 А.
Решение. Естественная и искусственная механические характеристики рассчитываются и затем строятся на основании уравнений (10.57) и (10.62):
| M = | 2 Mmax | и М и = | 2 Mmax |
| s кр/ s + s / s кр | s кр,и / s и + s и/ s кр,и |
Значения Mmax, s кр , s кр,и определяются из (10.58а), (10.58), (10.65), а r 2, входящее в (10.65), — из (10.59а). После подстановки паспортных данных в указанные формулы получим Mmax = 1760 Н•м, s кр = 0,166, s кр,и = 0,88, r 2 = 0,0187 Ом, s = 0,04.
Подставляя значения s (например, 0,004; 0,1; 0,2; 0,4; 0,6; 0,8; 1) в уравнения (10.57) и (10.64), определяем соответствующие им значения М и М и. Результаты расчета сводим в таблицу.
Механические характеристики n (М), s (M), построенные по результатам расчета, изображены на рис. 10.29 сплошными линиями (а - при r = 0, б - при r д = 0,08 Ом).Зависимость I 2 от s определяется из (10.59):
| I 2 = | √ | M ω0 s | при r д = 0; I 2и = | √ | M иω0 s и | при r д ≠ 0 |
| 3 r 2 | 3(r 2 + r д) |
Подставляя в (10.59) значения s, s и соответствующие им значения М и М и из упомянутой выше таблицы определяют I 2 и I 2и. Результаты расчета заносят в таблицу. На рис. 10.29 пунктирными линиями изображены построенные по результатам расчета графики I 2 и I 2и (график в — для r = 0, график г — для r д = 0,08 Ом).
Пример 10.3. Определить сопротивление, которое нужно включить в цепь ротора, чтобы двигатель вращался с частотой n = 650 об/мин и развивал момент М = 200 Н • м.
Паспортные данные двигателя: Р ном = 22 кВт, U ном = 380/220 В, n ном = 723 об/мин, Мmax / М ном = λ = 3, E 2к = 197 В, I 2ном = 70,5 А.
|
|
|
Решение. Искомое значение r д определяется из (10.65):
r д = r 2(s кр,и/ s кр -1).
Значения r 2, s кр, s кр,и определяются из (10.59а), (10.58) и (10.62), в котором М и = 200 Н•м, Мmax — из (10.58а), s и = (n 0 - n и)/ n 0 , где n = 650 об/мин.
После подстановки в указанные формулы соответствующих значений паспортных данных двигателя получим: r 2 = 0,0582 Ом, s ном = 0,036, Мmax = 873 Н•м, s кр = 0,21, s и = 0,133, s кр,и = 1,15, r д= 0,26 Ом.
ТОРМОЗНЫЕ РЕЖИМЫ РАБОТЫ
Работа многих производственных механизмов состоит из трех этапов: пуска в ход, технологической операции и останова. После отключения двигателя останов (торможение) происходит под действием сил трения, при этом кинетическая энергия движущихся частей выделяется в виде теплоты в узлах трения механизма. В тех случаях, когда запас кинетической энергии велик, а силы трения малы, время торможения может составить десятки секунд и даже минут.
Сокращение времени торможения, особенно когда время торможения технологической операции мало и исчисляется минутами или секундами, может значительно повысить производительность механизма, так как при торможении обычно полезной работы не совершается. Поэтому для сокращения времени торможения раньше применялись механические тормоза.
Транспортные устройства (электровозы, лебедки, мостовые краны, экскаваторы, эскалаторы и др.) отличаются тем, что в них возникают условия, когда под действием сил тяжести они могут развивать недопустимо высокие скорости. Для поддержания скорости на заданном уровне в этих условиях раньше использовались рабочие механические тормоза, которые обычно состоят из неподвижных тормозных колодок, прижимающихся силами пружины или другими способами к тормозному диску или барабану; в результате трения между колодками и диском возникает тормозной момент. Механические тормоза имеют ряд существенных недостатков, главными из которых являются быстрый износ трущихся поверхностей, трудность регулирования силы трения, значительное место, занимаемое тормозом, и т. д. Оказывается, двигатель может выполнять функции механических тормозов, работая при этом в том или ином тормозном режиме.
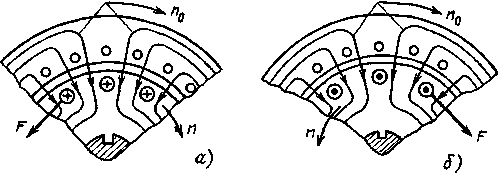
Рис. 10.30.
К пояснению тормозных режимов работы асинхронного двигателя:
а — генераторный тормозной режим,
б — режим противовключения
В настоящее время широко используются тормозные свойства двигателя, что во многих случаях позволило отказаться от механических тормозов. Механические тормоза необходимы как запасные или аварийные, если откажет электрическое торможение, а также для удержания механизма в неподвижном состоянии.
Асинхронный двигатель может работать в следующих тормозных режимах:
1. генераторном с отдачей энергии в сеть;
2. противовключения;
3. динамического торможения и др.
Во всех тормозных режимах двигатель развивает момент, действующий в сторону, противоположную направлению вращения ротора, поэтому он называется тормозным моментом. Под действием этого момента в одних случаях происходит быстрый останов, в других — поддержание заданной скорости.
Генераторным тормозным режимом называется режим работы двигателя, когда под действием внешнего момента ротор двигателя вращается в том же направлении, что и магнитное поле, но с большей частотой вращения. Направление возникающей при этом ЭДС в обмотке ротора определяется по правилу правой руки и указано на рис. 10.30, а. Поскольку обмотка ротора замкнута, в ней возникает ток того же направления. В результате взаимодействия тока ротора с вращающимся магнитным полем создаются сила и момент, направленные в сторону, противоположную вращению ротора (рис. 10.30, а), что легко определить с помощью правила левой руки.
Тормозной режим противовключения возникает в том случае, когда под действием внешнего момента, приложенного к валу двигателя, ротор вращается в противоположную сторону относительно вращающегося магнитного поля. На рис. 10.30, б показаны направления ЭДС и тока ротора, а также направления действия силы и момента при тормозном режиме противовключения.
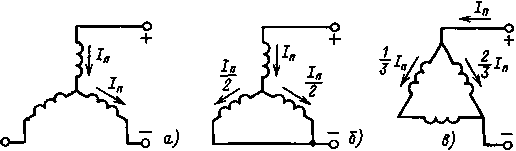
Рис 10.31. Схемы соединения обмоток статора при динамическом торможении
Для получения режима динамического торможения обмотку статора отключают от сети трехфазного тока и подключают на время торможения к источнику энергии постоянного тока по одной из схем, изображенных на рис. 10.31, а — в. Постоянный ток создает неподвижное в пространстве магнитное поле, картина которого для схемы рис. 10.31, а двухполюсного двигателя изображена на рис. 10.32.
Если ротор вращается, например, по часовой стрелке, то его проводники пересекают неподвижное магнитное поле и в них возникает ЭДС, а следовательно, ток указанного на рис. 10.32 направления. В результате взаимодействия тока ротора с неподвижным магнитным полем возникают сила и момент, действующие на ротор в направлении, противоположном направлению вращения ротора.
Кроме рассмотренных тормозных режимов существуют и другие, например конденсаторное торможение. Конденсаторное торможение осуществляется по схеме, изображенной на рис. 10.33. После отключения от сети обмотка статора оказывается замкнутой на конденсаторы. Энергия магнитного поля двигателя и электрического поля конденсатора возбуждает в цепи трехфазный ток. Магнитное поле двигателя, образованное этим током, вращается в ту же сторону, что и ротор, но с меньшей частотой, чем ротор. В результате в обмотке ротора возникают ЭДС, ток и тормозной момент. Этот режим аналогичен генераторному тормозному режиму работы двигателя. По мере торможения энергия магнитного и электрического полей уменьшается, превращается в теплоту в обмотках и тормозной момент убывает.
Для анализа тормозных режимов воспользуемся уравнением механической характеристики двигателя
| M = | 2 Мmax | . |
| s кр/ s + s / s кр |
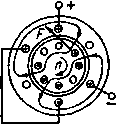
Рис. 10.32. К пояснению режима динамического торможения асинхронного двигателя
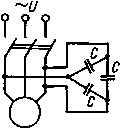
Рис. 10.33. Схема включения двигателя при конденсаторном торможении
В двигательном режиме скольжение изменяется в пределах от s = 1 до s = 0 и механические характеристики располагаются в квадранте I (графики 1 и 2 на рис. 10.34). Если в уравнение подставлять значения s больше единицы и меньше нуля, то механическая характеристика окажется соответственно в квадрантах IV и II. В квадранте II ротор вращается в сторону поля, но с большей частотой (n > n 0), в квадранте IV— против поля. Таким образом, участок механической характеристики, расположенный в квадранте II, соответствует генераторному тормозному режиму, в квадранте IV— тормозному режиму противовключения.
Возникновение тормозных режимов можно пояснить на примере простейшего устройства — лебедки. Барабан 2 лебедки (рис. 10.35), на котором уложен канат с подвешенным на конце грузом G, через систему зубчатых передач связан с валом двигателя 1.
Напомним вначале известное из механики положение. Допустим, что груз удерживается на каком-то расстоянии от земли механическим тормозом. Как поведет себя лебедка, если отключить тормоза, не включая двигатель. Груз будет опускаться, если момент, развиваемый грузом М гр, окажется больше момента сил трения М трво всех звеньях механизма. Система останется в покое, если момент сил трения окажется больше момента веса груза.
Рассмотрим, как будет вести себя лебедка, когда механические тормоза отключены и двигатель включен в сеть таким образом, что его магнитное поле вращается в сторону, соответствующую опусканию груза (рис. 10.35, а). В этом случае двигатель создаст момент, действующий согласно с моментом, развиваемым грузом, и начнет разгоняться, а груз опускаться. До какой частоты вращения разгонится двигатель?
При М тр > М гр двигатель будет работать в двигательном режиме с частотой вращения, соответствующей точке а характеристики 2 (см. рис. 10.34), и развивать момент, равный
M = M тр - M гр.
При М гр > М тр избыточный момент, равный
М = М изб = М гр - М тр,
заставит ротор вращаться с частотой, большей n 0. Двигатель будет работать в генераторном режиме с частотой вращения, соответствующей точке б характеристики 2, и развивая тормозной момент
М т = М изб .
Этот режим называется генераторным потому, что энергия, поступающая к валу двигателя (потенциальная энергия опускающегося груза), возвращается за вычетом потерь энергии в двигателе в сеть. Мощность на валу двигателя, обусловленная потенциальной энергией опускающегося груза (развиваемая избыточным моментом),
Р в = - М ω*.
Электромагнитная мощность, передаваемая статору двигателя,
Р эм = - М ω*0 = Р в - Δ Р 2.
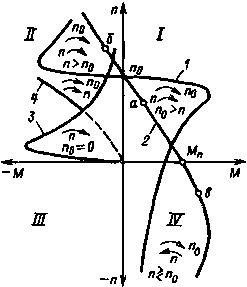
Рис. 10.34. Естественная ( 1 ) и реостатная ( 2 ) механические характеристики двигателя; динамический ( 3 ) и конденсаторный ( 4 ) режимы торможения
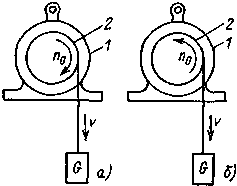
Рис. 10.35. К пояснению генераторного тормозного режима ( а ) и режима проивовключения ( б )
* Знак «-» в выражениях для Р в и Р эм указывает на то, что двигатель потребляет энергию с вала и что электромагнитная мощность передается вращающимся полем от ротора к статору.
Мощность, отдаваемая двигателем в сеть,
Р 1 = Р эм - Δ Р 1.
Тормозной режим противовключения возникает следующим образом.
Если после отключения тормозов включить двигатель в сеть так, чтобы его магнитное поле вращалось в сторону подъема груза (рис. 10.35, б), то груз будет подниматься, когда
М п > М гр + М тр,
где М п — начальный пусковой момент двигателя.
Если же
М гр > М п + М тр,
то ротор двигателя начнет вращаться в сторону спуска груза против поля и достигнет частоты, соответствующей точке в характеристике 2 (см. рис. 10.34), где М гр = М + М тр.
Таким образом, возникает тормозной режим противовключения. В этом режиме двигатель одновременно потребляет энергию из сети и с вала, и вся энергия выделяется в двигателе в виде теплоты. Мощность на валу двигателя
Р в = М (- ω) = - М ω.
Электромагнитная мощность
Р эм = М ω0
положительная, следовательно, как и в двигательном режиме, она передается вращающимся полем от статора к ротору. Мощность, потребляемая двигателем из сети,
Р = Р эм + Δ Р 1.
выделяющаяся в роторе в виде теплоты,
Δ Р 2 = Р в+ Р эм.

Рис. 10.36 Схема включения двигателя для осуществления торможения противовключением

Рис. 10.37 Механические характеристики, поясняющие процесс торможения
Быстрый останов двигателя и связанного с ним механизма может быть осуществлен по схеме, изображенной на рис. 10.36. Переключатель П позволяет включать двигатель для вращения по часовой стрелке и против часовой стрелки. Если в положении а переключателя ротор вращается по часовой стрелке, то при положении б он вращается против часовой стрелки.
На рис. 10.37 изображены механические характеристики двигателя. Если в положении а переключателя механическая характеристика располагается в первом и четвертом квадрантах, то в положении б переключателя характеристика будет располагаться во втором и третьем квадрантах. Предположим, что переключатель находится в положении а и двигатель разгоняется до установившейся частоты вращения, соответствующей точке 1 механической характеристики (рис. 10.37). После технологической операции переключатель переводят в положение б. При этом магнитное поле мгновенно изменит направление вращения, а ротор по инерции будет продолжать вращаться в ту же сторону. Двигатель окажется в режиме противовключения (в точке 2 механической характеристики). Под действием тормозного момента двигатель быстро остановится. В тот момент, когда ротор достигнет частоты вращения, равной нулю (точка 3), двигатель необходимо отключить от сети, в противном случае ротор разгонится в обратном направлении.
Методика расчета сопротивлений реостатов в цепи ротора, расчета и построения механических характеристик двигателя, работающего в тормозных режимах, такая же, как и для двигательного режима.
Расчет и построение механических характеристик двигателя, работающего в режиме динамического и конденсаторного торможений, выходит за пределы программы данного курса. Однако для ознакомления на рис. 10.34 приведены механические характеристики двигателя при динамическом и конденсаторном торможении (соответственно графики 3 и 4).
|
|
|
