 |


15.2. Изменением скольжения. 15.3. Изменением напряжения на зажимах статора. 15.4. Изменением числа пар полюсов. 15.5. Изменением частоты источника питания
|
|
|
|
15. 2. Изменением скольжения
 Путем введения в цепь обмотки ротора регулировочного реостата. Этот способ требует применения двигателя с фазным ротором. Регулировочный реостат должен быть рассчитан на длительную нагрузку током ротора, а не на кратковременную, как пусковой реостат. При увеличении сопротивления цепи ротора путем постепенного увеличения сопротивления реостата будет расти скольжение, следовательно, частота вращения двигателя будет уменьшаться. На рис. 15. 1 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3 > Rр2 > 0, Rр1 = 0.
Путем введения в цепь обмотки ротора регулировочного реостата. Этот способ требует применения двигателя с фазным ротором. Регулировочный реостат должен быть рассчитан на длительную нагрузку током ротора, а не на кратковременную, как пусковой реостат. При увеличении сопротивления цепи ротора путем постепенного увеличения сопротивления реостата будет расти скольжение, следовательно, частота вращения двигателя будет уменьшаться. На рис. 15. 1 приведены механические характеристики асинхронного двигателя при разных сопротивлениях регулировочного реостата Rр3 > Rр2 > 0, Rр1 = 0.
Рис. 15. 1
Как следует из рис. 15. 1, при этом способе можно получить большой диапазон регулирования частоты вращения в сторону понижения. Основные недостатки этого способа:
1. Из-за больших потерь на регулировочном реостате снижается коэффициент полезного действия, т. е. способ неэкономичный.
2. Механическая характеристика асинхронного двигателя с увеличением активного сопротивления ротора становится мягче, т. е. снижается устойчивость работы двигателя.
3. Невозможно плавно регулировать частоту вращения.
Из-за перечисленных недостатков этот способ применяют для кратковременного снижения частоты вращения.
15. 3. Изменением напряжения на зажимах статора
Плавное регулирование частоты вращения двигателя в узких пределах возможно уменьшением напряжения на обмотках статора. Этот способ применим к двигателям с короткозамкнутым ротором. Если при работе двигателя уменьшить напряжение сети, то ток в обмотке ротора уменьшится, что приведет к увеличению скольжения, т. е. к уменьшению частоты вращения двигателя. Следует отметить, что при этом резко снижается вращающий момент, пропорциональный квадрату сетевого напряжения.
|
|
|
15. 4. Изменением числа пар полюсов
Ступенчатое изменение частоты вращения двигателя возможно при изменении числа полюсов магнитного поля, создаваемого обмотками статора. Для этого на статоре размещают две обмотки с различным числом полюсов или одну обмотку, которая допускает переключение на различное число полюсов.
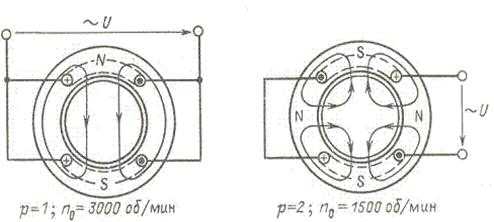
Такая обмотка изображена на рис. 15. 2. На рисунке (а) схематически показаны две катушки одной фазы, соединенные последовательно, которые создают четыре полюса. Если мы изменим направление тока в одной из катушек, включив ее навстречу другой, то обмотка будет создавать два полюса (рисунок (б)). При изменении числа полюсов обмотки статора изменится число оборотов магнитного поля статора, а, следовательно, и скорость вращения ротора.
Двумя отдельными обмотками снабжаются только статоры маломощных двигателей; у крупных двигателей более целесообразным является переключение катушек одной и той же обмотки для получения различного числа полюсов. В большинстве случаев статор асинхронной машины снабжается двумя независимыми обмотками, каждая из которых переключается в соотношении 1: 2. Таким образом, двигатель имеет четыре скорости вращения, например: 3000, 1500, 1000 и 500 об/мин.
На рис. 15. 2 показана схема соединения и магнитное поле статора двигателя при последовательном б и параллельном а соединении обмоток.
а б
Рис. 15. 2
Достоинства этого способа регулирования: сохранение жесткости механических характеристик, большой К. П. Д. Недостатки: ступенчатое регулирование, большие габариты и большая стоимость двигателя.
15. 5. Изменением частоты источника питания
Наиболее перспективным методом управления частотой вращения асинхронного двигателя является регулирование частоты переменного тока, питающего двигатель. Для этого используются тиристорные преобразователи частоты. При регулировании частоты необходимо, чтобы при изменении частоты вращения двигателя не изменялся его вращающий момент. Поэтому при изменении частоты для поддержания вращающего момента постоянным необходимо пропорционально изменять напряжение на зажимах статора. Другими словами, условием постоянства вращающего момента двигателя при регулировании частоты будет i/f = const.
|
|
|
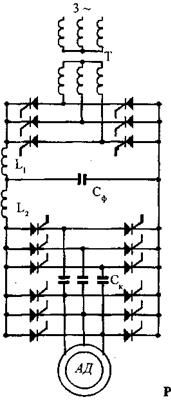 Блок-схема тиристорного преобразователя (рис. 15. 3) состоит из четырех основных элементов: регулируемого выпрямителя, звена постоянного тока, регулируемого инвертора и блока управления. Управление блоком выпрямления используется для регулирования напряжения на выходе преобразователя, т. е. на зажимах асинхронного двигателя, а управление инвертором служит для регулирования выходной частоты.
Блок-схема тиристорного преобразователя (рис. 15. 3) состоит из четырех основных элементов: регулируемого выпрямителя, звена постоянного тока, регулируемого инвертора и блока управления. Управление блоком выпрямления используется для регулирования напряжения на выходе преобразователя, т. е. на зажимах асинхронного двигателя, а управление инвертором служит для регулирования выходной частоты.
Установка может быть дополнена тахогенератором – небольшим генератором, приводимым в движение от вала двигателя. ЭДС тахогенератора, пропорциональная скорости управляемого двигателя, воздействует на блок управления, что дает возможность автоматически поддерживать постоянную частоту вращения асинхронного двигателя.
Рис. 15. 3
Достоинства этого способа: плавное регулирование, возможность повышать и понижать частоту вращения, сохранение жесткости механических характеристик, экономичность. Основной недостаток – требуется преобразователь частоты, т. е. дополнительные капитальные вложения.
|
|
|
