 |


Моделирование головы
|
|
|
|
Обычно модель зубов не является частью модели головы, но располагается под ее поверхностью за губами (рис. 5.31). Поскольку как правило, череп или челюсть не воссоздаются в моделзи, зубы - единственная часть этих внутренних структур, которую может видеть зритель. Но иногда приходится показывать и десны (рис. 5.32). При анимации модель зубов должна двигаться так же, как движутся настоящие зубы.
В действительности верхние зубы прикреплены к черепу и не перемещаются относительно головы в целом (рис. 5.33). Чтобы воспроизвести этот эффект, сделайте модель верхних зубов потомком модели головы и не меняйте их положение. Нижние зубы соединены с челюстью и перемещаются одновременно с ее поворотами, когда открывается рот (рис. 5.34). Для реализации такого движения задайте для модели нижних зубов ось вращения, совпадающую с осью вращения реальной челюсти. Она располагается ниже уха и смещена вперед относительно его. Благодаря этому нижние зубы выглядят достаточно убедительно.

Рис. 5.30. Варианты формирования зубов

Рис. 5.31. Расположение модели зубов относительно модели головы

Рис. 5.32. Модель, у которой видны десны

Рис. 5.33. Верхние зубы прикреплены к черепу

Рис. 5.34. Нижние зубы перемещаются при движении челюсти
Язык
Язык играет важную роль, когда анимация сопровождается речью, но не в такой степени, как может показаться. Многие персонажи фильма «Toy Story» («История игрушек»), например, лишены языков. Однако с этой деталью персонаж выглядит правдоподобнее.
Язык должен быть гибким, поэтому для его анимации применяют деформацию скелета, решетку, кластер или иной способ. Обычно язык является отдельным объектом, перемещающимся внутри полости рта (рис. 5.35).
|
|
|

Рис. 5.35. Язык в виде отдельного объекта

Рис. 5.36. Этапы моделирования языка
Поскольку камера редко заглядывает в глотки персонажей, мы нечасто видим основание языка.
Модель языка проще всего сконструировать в три приема: создать сферу, затем сплющить ее и посередине сделать ложбинку (рис. 5.36). Чтобы получить более детализированную поверхность, применяют карты текстур и неровностей. Если цвет текстуры постепенно переходит в черный по мере приближения к основанию языка, эту часть зритель не увидит.
Соединение головы с телом
После того как модель головы создана, необходимо сконструировать шею и присоединить ее к телу. Есть три основных способа решения данной задачи.
Шея как часть тела
Можно сформировать шею как небольшой выступ из тела и разместить на ней голову (рис. 5.37). При этом в области соединения головы с шеей возникает шов. Если модель строится на основе NURBS, шов нетрудно скрыть при помощи сопряжения двух поверхностей (рис. 5.38).

Рис. 5.37. Шея в виде выступа
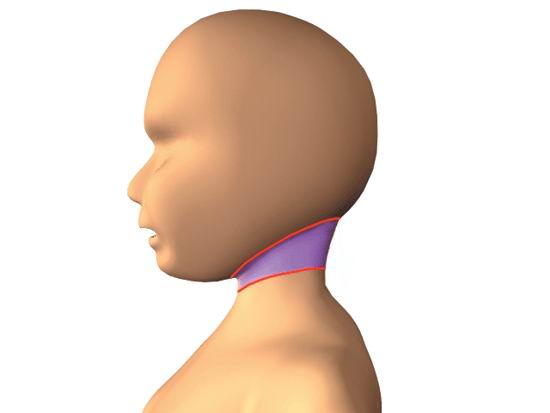
Рис. 5.38. Использование сопряжения в NURBS-модели
Шея как часть головы
Можно также экструдировать шею из головы и присоединить ее к телу на уровне плеч. Такое решение более предпочтительно, поскольку шва между головой и шеей не остается. Шов между шеей и телом легче скрыть, например воротником или другой деталью одежды (рис. 5.39). Если вы работаете с патчами, для стыковки шеи с телом используйте инструменты, обеспечивающие бесшовное соединение (рис. 5.40).

Рис. 5.39. Маскировка шва с помощью воротника

Рис. 5.40. Стыковка полигональных моделей головы и тела
Скелет и деформация каркаса
- Иерархические цепочки и анимация персонажа В зависимости от строения, модель персонажа представляет собой либо совокупность сегментов, либо цельную оболочку, деформируемую при помощи скелета. В любом случае необходимо найти способ соединения сегментов и скелета в единый объект. Желательно, чтобы одновременно с движением руки перемещалась кисть, а ноги двигались в такт с движением бедер. Все это можно сделать с помощью иерархической цепочки.
- Манипулирование иерархическими цепочками
- Опорные точки и вращение сочленений
- Упражнение
- Скелет и иерархия
- Манипулирование иерархическими цепочками
- Прямая кинематика
- Инверсная кинематика
- Скелет и деформация каркаса
- Диапазон поворотов сустава
- Выбор метода кинематики
- Конструирование скелета
- Конструирование скелета кисти руки
- Деформация каркаса
- Метод прямого сопоставления
- Метод взвешенного сопоставления
- Дополнительные инструменты деформации
- Деформация и тип поверхности
Другие методы деформации
|
|
|
- Решетки
- Кластеры Деформация сплайнов Морфинг
· Скелет и деформация каркаса
· Создав модель персонажа, можно приступить к его анимации. Если это полностью сегментированная модель, ее отдельные компоненты следует связать в иерархическую цепочку; если частично сегментированная или цельная, то придется деформировать ее оболочку. Обычно задача анимации решается при помощи деформирования скелета.
· Данная операция подразумевает, что анимации подвергается скелет. Поэтому его формирование - важный этап конструирования персонажа. При удачном построении скелета герой быстро перемещается, и им легко манипулировать, придавая различные позы. С помощью созданного скелета деформируется фигура персонажа. Будем надеяться, что в результате герой запрыгает по экрану, как живой.
· Иерархические цепочки и анимация персонажа
· В зависимости от строения, модель персонажа представляет собой либо совокупность сегментов, либо цельную оболочку, деформируемую при помощи скелета. В любом случае необходимо найти способ соединения сегментов и скелета в единый объект. Желательно, чтобы одновременно с движением руки перемещалась кисть, а ноги двигались в такт с движением бедер. Все это можно сделать с помощью иерархической цепочки. Выстраивая иерархию, вы сообщаете компьютеру о том, как связаны между собой части модели. При этом указывается, что кости стопы связаны с костями голени, кости голени - с костями бедер и т.д. Иерархическая цепочка выглядит как дерево, каждая ветвь которого соответствует определенной связи. Иерархическую цепочку можно рассматривать и как совокупность вложенных каталогов и папок на вашем компьютере. Стопа является подкаталогом голени, голень - подкаталогом бедра и т.д.
|
|
|
· Манипулирование иерархическими цепочками
· При манипуляции иерархическими цепочками в результате движения элементов-предков перемещаются элементы-потомки. Такой способ движения называется прямой кинематикой. При использовании инверсной (или обратной) кинематики происходит обратное: потомки приводят в движе-. ние родительские элементы. Данный способ также будет рассмотрен в этой главе.
· В методе прямой кинематики при перемещении дочернего объекта, например, сучка дерева, положение элемента-родителя (ветки или ствола) остается неизменным. Но если вы перемещаете ствол, все остальные элементы, в том числе ветки и сучки, следуют за ним. Подобно дереву, иерархия должна иметь ствол (или корень) - единственный объект, который является предком всех остальных элементов и управляет всеми ветвями иерархии. Такому же условию должна удовлетворять иерархия частей модели тела персонажа. При моделировании фигуры человека корневым элементом, как правило, являются кости таза. Они располагаются почти рядом с центром тяжести тела, что и обусловливает их выбор в качестве общего предка. Кроме того, они распределяют вес всего тела.
· Кости таза поддерживают позвоночник и верхнюю часть туловища, передавая их вес на ноги, поэтому позвоночник и ноги являются потомками таза. Позвоночник, в свою очередь, - это предок плеч, а их потомок -руки. Потомками ног являются стопы. Выбор таза в качестве корневого элемента иерархии облегчает моделирование движений, например, поворота тела назад, поскольку движение туловища в данном случае зависит от перемещения таза (рис. 6.1).
· Однако не всегда компоненты модели связываются в единую иерархическую цепочку. Иногда ее необходимо разделить на несколько частей, чтобы отдельно выполнить анимацию некоторых элементов. Например, ноги одетого персонажа могут быть отдельными объектами, образующими свою иерархию. Другим примером является простейший персонаж -мешок с мукой, у которого «ноги» состоят из одного элемента. В данном
|
|
|
· 
· Рис. 6.1 Базовая иерархия элементов модели человеческого тела случае, вероятно, проще исключить эти объекты из общей иерархической цепочки.
· Опорные точки и вращение сочленений
· При сборке скелета или сегментированной модели необходимо сообщить программе, как вращаются сочленения (суставы) персонажа. Например, голень поворачивается относительно колена. Когда компьютер создает модель голени, он не подозревает о функциональном назначении данного объекта, в частности, о том, что голень поворачивается относительно колена. Поэтому в качестве центра вращения (опорной точки) программа выбирает произвольную точку, в качестве которой обычно выступает физический центр объекта, и в результате анимация выполняется неправильно (рис. 6.2). Чтобы предплечье персонажа поворачивалось надлежащим образом, то есть относительно локтя, следует вручную переназначить опорную точку (рис. 6.3).
· К сожалению, при анимации персонажей не допускается произвольный порядок расположения опорных точек. Возможно, при сборке модели персонажа вам придется переместить опорные точки в область суставов, чтобы части тела двигались реалистично. Предплечье поворачивается относительно локтя, бедра - относительно таза, голова - относительно шеи и т.д.
· В следующем упражнении вы построите модель ^персонажа из сфер и цилиндров. Это задание можно выполнить средствами практически
· 
· Рис. 6.2. Вращение руки вокруг ее физического центра
· 
· Рис. 6.3. Правильно назначенная опорная точка
· любого пакета трехмерной графики. На примере несложного персонажа вы научитесь выстраивать иерархическую цепочку элементов модели.
· Упражнение 1. Создание простой сегментированной модели персонажа
· 
· 1. Начните моделирование с элементарной сферы.
· 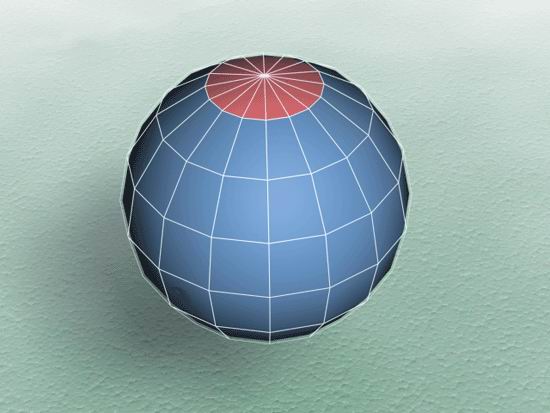
· 2. Выделите многоугольники на верхушке сферы.
· 
· 3. Экструдируйте эти грани кверху. В результате получится объект, имеющий форму шара на палке, который будет использован в качестве сегмента модели персонажа.
· 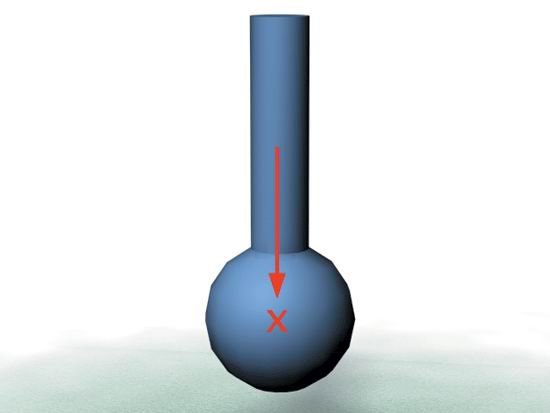
· 4. Переместите опорную точку данного сегмента в центр сферы.
· 
· 5. Создайте две копии сегмента. Разместите одну над другой, как показано на рисунке, чтобы получить модель позвоночника. Сделайте основание позвоночника предком среднего сегмента, а средний сегмент - предком верхнего.
· 
· 6. Создайте два цилиндра. Один будет представлять таз и находиться в основании позвоночника. Сделайте этот сегмент предком основания позвоночника. Верхний цилиндр моделмрует плечи и является потомком верхушки позвоночника.
|
|
|
· 
· 7. Подвесьте еще по два сегмента в виде шаров на палках по обе стороны плеч для моделирования рук. Плечи являются предком бицепсов, а те, в свою очередь, -предками предплечий. Элементарные сферы на концах предплечий представляют собой простейшую модель кисти руки.
· 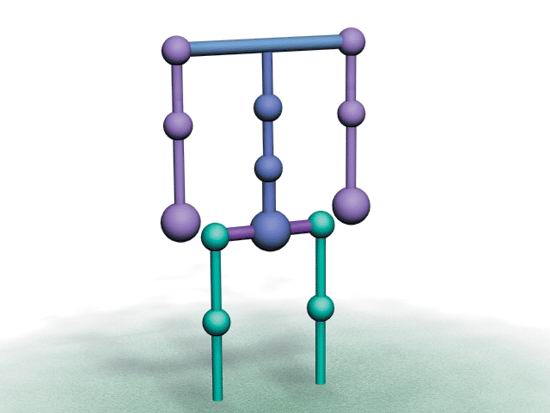
· 8. Скопируйте сегменты рук и перенесите их вниз, в область таза. Сделайте таз предком бедер, а каждое бедро - предком соответствующей голени.
· 
· 9. Добавьте элементарную сферу, которая станет головой персонажа.
· 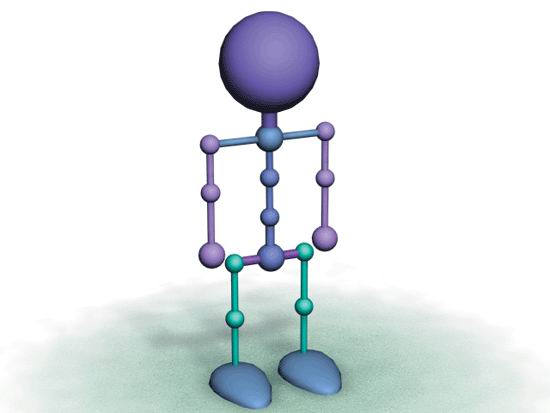
· 10. Добавьте две сплющенные сферы в качестве моделей стоп.
· Если иерархическая цепочка построена правильно, при движении таза будет перемещаться все тело. Поворот бедер заставит двигаться голень и стопу. При правильной расстановке опорных точек все сегменты будут вращаться вокруг сферы, находящейся в основании позвоночника. Подвигайте героя по экрану и проверьте функционирование всех суставов. Сохраните созданную модель для дальнейших упражнений.
· Скелет и иерархия
· Модели персонажей с цельной оболочкой не разделены на сегменты, поэтому приходится деформировать их каркасы. В качестве инструмента-модификатора чаще всего используется скелет. Он состоит из костей и суставов - объектов, которые обычно имеют форму тетраэдра и не визуализируются. Они располагаются внутри цельной модели персонажа подобно настоящим костям, причем компоненты скелета выстраиваются в иерархическую цепочку, как было показано в предыдущем упражнении. Кости обычно выполняют лишь вспомогательную роль. По ним ориентируется утилита деформации каркаса, так как кости указывают направление его перемещения.
· Кости можно создавать в нескольких различных пакетах трехмерной графики. Несмотря на внешнее различие элементов скелета, все пакеты работают с ними одинаково (рис. 6.4). Многие программы позволяют формировать скелет из регулярных объектов. Чаще всего используются параллелепипеды, поскольку их модели легко строить, но допускается применение объектов и другой формы (рис. 6.5). По расположению костей встроенные модули определяют вид деформации каркаса. Регулярные объекты становятся видны при визуализации, поэтому их приходится либо скрывать, либо отключать соответствующую опцию перед рендерингом персонажа.
· 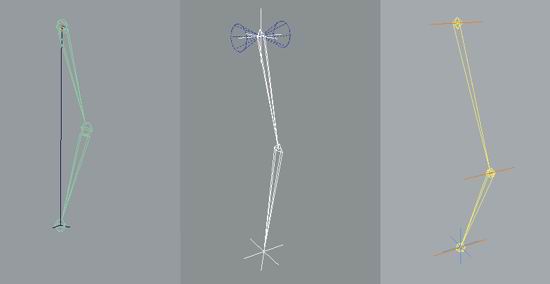
· Рис. 6.4. Изображение костей в различных программах
Манипулирование иерархическими цепочками
Если компоненты персонажа или скелета образуют иерархию, ими можно манипулировать. Для этого существует два метода: прямой кинематики и обратной (или инверсной) кинематики. Каждый из них имеет свои преимущества и недостатки. Многие персонажи построены таким образом, что некоторыми их компонентами можно манипулировать только при помощи метода прямой кинематики, а другими - исключительно обратной.

Рис. 6.5. Скелеты, составленные: только из костей; костей и параллелепипедов; только параллелепипедов. Все конструкции позволяют деформировать каркас
Прямая кинематика
При использовании метода прямой кинематики любое воздействие передается по иерархической цепочке сверху вниз. Именно этим способом вы тестировали персонаж в предыдущем упражнении. Если переместить таз персонажа, движется все тело; если повернуть локоть, движется только рука. Поработав по методу прямой кинематики, вы скоро поймете, что единственный способ переместить части тела персонажа (за исключением движения таза) - повернуть суставы.

Рис. 6.6. Исходное положение персонажа

Рис. 6.7. Поворот руки в плече

Рис. 6.8. Поворот руки в локте
Чтобы ваш герой взял в руку кофейную чашку, вначале поверните плечо, затем локоть, запястье и пальцы, перемещаясь по иерархической цепочке сверху вниз (рис. 6.6-6.8). В результате каждого поворота рука будет приближаться к чашке. Нельзя просто переместить руку к чашке - она не выполнит это движение.
Инверсная кинематика
Правильное использование метода инверсной кинематики позволяет воплотить самые смелые мечты аниматора. Данный метод прямо противоположен предыдущему, поскольку перемещение компонентов-потомков приводит к изменению положения компонентов-предков. Он весьма прост в применении. Вы перемещаете кисть героя к кофейной чашке, и остальные части руки автоматически следуют за ней (рис. 6.9). Однако не все так просто, как кажется на первый взгляд: программа должна рассчитать повороты всех суставов, чтобы движение выглядело естественным. К счастью, большинство программ располагает вспомогательными средствами, например функцией торможения, смягчающей движение по мере того, как сустав приближается к предельному положению.
Один из недостатков метода инверсной кинематики заключается в том, что в распоряжении аниматора имеется лишь один концевой эффектор для всей иерархической цепочки, с помощью которого контролируется движение каждого сустава. Если анимации подвергаются конечности, имеющие по два сустава, например ноги или руки человека, возможно, особых проблем не будет. Однако при работе с конечностями, имеющими множество суставов (такими как хвост), контроль над формой объекта утрачивается. Вероятно, в подобной ситуации лучше выбрать метод прямой кинематики.
Компьютер не может определить, как должны двигаться части тела. Если какая-либо задача решается путем поворота локтевого сустава назад или вбок, машина произведет расчет этих движений. Однако подобное перемещение руки не соответствует действительности и неприемлемо для аниматора. Локтевые суставы представляют собой шарнирные узлы и допускают только поворот вперед. Не располагая такими данными, компьютер не сможет их правильно расположить. На рис. 6.10-6.12 представлены три варианта поворота локтевого сустава, при которых кисть руки придвигается к чашке. Правильным является лишь первое решение, но компьютер об этом не знает. Необходимо точно указать программе, как должен двигаться сустав.
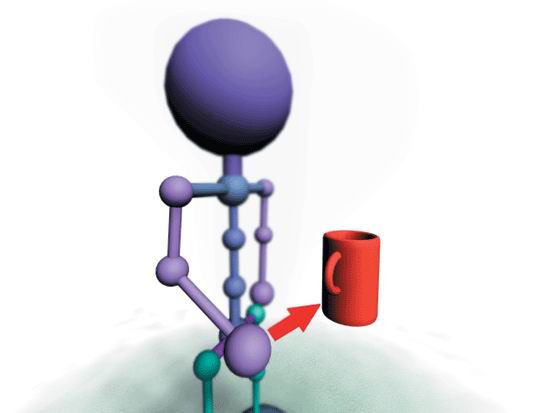
Рис. 6.9. Пример инверсной кинематики

Рис. 6.10. Правильный вариант поворота

Рис. 6.11. Неправильный вариант

Рис. 6.12. Неправильный вариант
|
|
|
