 |


Рис. 18. Работа толкающего и тянущего РВ
|
|
|
|
Рис. 18. Работа толкающего и тянущего РВ
На вертолете Ми-8Т рулевой винт толкающий (справа по полету), направление вращения – верхняя лопасть идет на кабину, по полету (Рис. 18, 19).

Рис. 19. Условия работы РВ МИ-8Т
На вертолете Ми-8МТ рулевой винт тянущий (слева по полету), направление вращения – верхняя лопасть идет от кабины, против полета (Рис. 18).
Винт реверсивный по направлению тяги. Вектор силы тяги изменяет свое направление на противоположное на режиме самовращения несущего винта.
Направление вращения РВ у вертолета Ми-8МТ: по часовой стрелке, если смотреть со стороны рулевого винта. Изменение направления вращения рулевого винта (по сравнению с вертолетом Ми-8Т) привело к повышению эффективности путевого управления, особенно на режимах малых скоростей. Это связано с тем, что увеличилась скорость обтекания лопасти, что привело к уменьшению углов установки лопастей для создания равноценной тяги.
Относительная потеря силы тяги РВ на обдувку киля определяется схемой РВ (рис. 3), расстоянием  между килем и РВ и обдуваемой площадью киля
между килем и РВ и обдуваемой площадью киля  . Если РВ тянущий, боковая сила киля создается от непосредственной обдувки киля индуктивным потоком, отбрасываемым РВ. Если РВ толкающий, индуктивный поток отбрасывается в свободное воздушное пространство, но подсасывается из зоны расположения киля. Поэтому потери тяги толкающего РВ обусловлены, во-первых, силой разряжения на киле и прилегающей части хвостовой балки, а во-вторых, аэродинамическим затенением винта килем. Для любого типа РВ присутствие киля всегда вызывает потерю силы тяги, не компенсируемую незначительным экранным эффектом или оптимальным профилированием киля.
. Если РВ тянущий, боковая сила киля создается от непосредственной обдувки киля индуктивным потоком, отбрасываемым РВ. Если РВ толкающий, индуктивный поток отбрасывается в свободное воздушное пространство, но подсасывается из зоны расположения киля. Поэтому потери тяги толкающего РВ обусловлены, во-первых, силой разряжения на киле и прилегающей части хвостовой балки, а во-вторых, аэродинамическим затенением винта килем. Для любого типа РВ присутствие киля всегда вызывает потерю силы тяги, не компенсируемую незначительным экранным эффектом или оптимальным профилированием киля.
|
|
|
В конечном счете, потеря силы тяги РВ зависит от зазора между плоскостью вращения РВ и килем Zрв а также от значений обдуваемой площади киля Sк (рис. 20).

Рис. 20. Зависимость потери тяги РВ от его относительного
расстояния до киля Zрв и обдуваемой площади киля Sк
Для толкающего РВ величина  по мере приближения РВ к килю возрастает значительно интенсивнее, чем для тянущего, однако в практическом реализуемом диапазоне значений 0, 3<
по мере приближения РВ к килю возрастает значительно интенсивнее, чем для тянущего, однако в практическом реализуемом диапазоне значений 0, 3<  < 0, 5 потери силы тяги толкающего РВ в несколько раз меньше, чем тянущего.
< 0, 5 потери силы тяги толкающего РВ в несколько раз меньше, чем тянущего.
При обычных параметрах киля и расположения РВ  для тянущего и
для тянущего и  для толкающего РВ.
для толкающего РВ.
В систему путевого управления включена система подвижных упоров управления СПУУ-52-1. Она предназначена для автоматического изменения положения упора, ограничивающего максимальную величину угла установки лопастей РВ в зависимости от плотности воздуха с целью предохранения винта и трансмиссии от перегрузки. При увеличении плотности воздуха максимальный угол установки лопастей РВ уменьшается, а при уменьшении плотности воздуха – увеличивается.
Таким образом, по сравнению с несущим винтом рулевой винт работает в более трудных условиях:
- более широкий диапазон изменения углов установки и атаки лопастей;
- работа в интерферированном потоке вблизи земли;
- неблагоприятное воздействие бокового ветра вблизи земли.
1. 2. 3 Фюзеляж
Представляет собой цельнометаллический полумонокок переменного сечения и состоит из носовой, центральной частей, хвостовой и концевой балок.
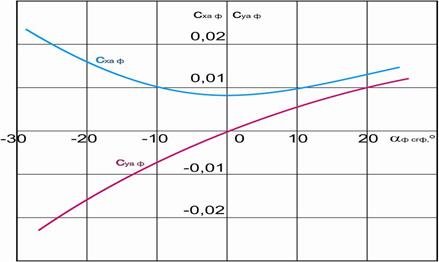
Аэродинамические характеристики фюзеляжа представлены на рис. 21.
|
|
|
