 |


Xlabel(''), ylabel('Выходы a(i)'),grid
|
|
|
|
Subplot(3,1,2)
plot(0:63,[[0 0]; W],'k') % Рис.3.2,б
xlabelf11), ylabeK'Beca входов w(i)'),grid
subplot(3,1,3) semilogy(l:63, ее,'+k') % Рис.3.2,в
Xlabel('Циклы'), ylabel('Ошибка'),grid

Рис. 9
Как следует из анализа графиков, для достижения требуемой точности адаптации требуется 12 шагов. Сравнивая рис. 9 и 8, можно убедиться, что существует различие в динамике процедур адаптации при последовательном и групповом представлении данных.
Динамические сети. Эти сети характеризуются наличием линий задержки, и для них последовательное представление входов является наиболее естественным.
Последовательный способ. Обратимся к линейной модели нейронной сети с одним входом и одним элементом запаздывания. Установим начальные условия на линии задержка
а также для весов и смещения равными 0, а параметр скорости настройки равным 0.5:
net = newlin([-l 1],1,[0 1],0.5);
Pi = {0}; % Начальное условие для элемента запаздывания
net.IW{l} = [0 0]; % Значения весов
net.biasConnect = 0; % Значение смещения
Чтобы применить последовательный способ адаптации, представим входы и цели как массивы ячеек:
Р = {-1/2 1/3 1/5 1/4}; % Вектор входа
Т = { -1 1/6 11/15 7/10}; % Вектор цели
Попытаемся приспособить сеть для формирования нужного выхода на основе сле дующего соотношения:
y(t) = 2p(t)+p(t-l).
Используем для этой цели М-функцию adapt и основной цикл адаптации сети с задан ной погрешностью, как это уже было описано выше:
ЕЕ = 10; i = 1;
while ЕЕ > 0.0001
[net,a{i},e{i},pf] = adapt(net,P,T);
W(i,:)=net.IW{l,l};
ЕЕ = mse(e{i});
ee(i) = ЕЕ;
i = i+1;
End
Сеть адаптировалась за 22 цикла. Результатом адаптации при заданной погрешности являются следующие значения коэффициентов линейной зависимости, значений выходов нейронной сети, приближающихся к значениям желаемого выхода, а также среднеквадратичная погрешность адаптации:
|
|
|
W(22,:)
ans = 1.983 0.98219
а{22}
ans = [-0.98955] [0.17136] [0.72272] [0.69177]
ЕЕ
ЕЕ = 7.7874е-005
Построим графики зависимости выходов системы и весовых коэффициентов от числа циклов обучения (рис. 3.3):
Subplot(3,1,1)
plot(0:22,[zeros(l,4); cell2mat(cell2mat(a1))],'fc') % Рис.3.3,a
Xlabel('’), ylabelCВыходы a(i)’),grid
Subplot(3,1,2)
plot(0:22,[[0 0]; W],'k") % Рис.3.3,б
Xlabel('')(ylabel('Beca входов w(i)'),grid
Subplot(3,l,3)
semilogy(l:22,ee,'+k') % Рис.3.3,в
xlabel('Циклы1), ylabel('Ошибка'),grid

Рис. 10
На рис. 10 а показаны выходы нейронов в процессе адаптации сети, а на рис. 10 б – коэффициенты восстанавливаемой зависимости, которые соответствуют элементам:-тора весов входа.
Групповой способ представления обучающего множества для адаптации динамичестем систем не применяется.
Обучение нейронных сетей
Статические сети. Воспользуемся рассмотренной выше моделью однослойной линейной
сети с двухэлементным вектором входа, значения которого находятся в интервале [-1 1]
и нулевым параметром скорости настройки, как это было для случая адаптации:
% Формирование однослойной статической линейной сети с двумя входами
% и нулевым параметром скорости настройки
net = newlin([-l 1;-1 1],1, 0, 0);
net.IWfl} = [0 0]; % Значения весов
net.b{l} = 0; % Значения смещений
Требуется обучить параметры сети так, чтобы она формировала линейную зависимость вида
t = 2pl+p2.
Последовательный способ. Для этого представим обучающую последовательноcnm
в виде массивов ячеек
Р = {[-1; 1] [-1/3; 1/4] [1/2; 0] [1/6; 2/3]}; % Массив векторов входа
Т = {-1 -5/12 1 1}; % Массив векторов цели
Теперь все готово к обучению сети. Будем обучать ее с помощью функции train в те чение 30 циклов.
В этом случае для обучения и настройки параметров сети используются фунции trainwb и learnwh соответственно.
% Параметр скорости настройки весов
net.inputWeights{l,1}.learnParam.lr = 0.2;
net.biases{1}.learnParam.lr = 0; % Параметр скорости настройки смещений
net.trainPararo.epochs =30; % Число циклов обучения
net1 = train(net,P,T);
|
|
|
Параметры сети после обучения равны следующим значениям:
W = netl.iw(1)
W = 1.9214 0.92599
у = sim(netl, P)
у = [-0.99537] [-0.40896] [0.96068] [0.93755]
ЕЕ = mse([y{:}]-[T{:}])
ЕЕ = 1.3817е-003
Зависимость величины ошибки обучения от числа циклов обучения приведена на рис. 11
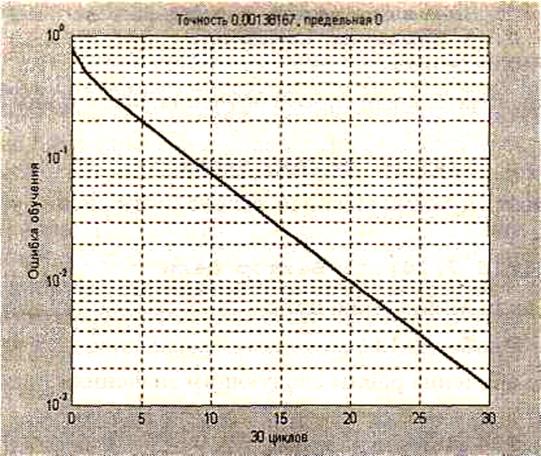
Рис. 11
Это тот же самый результат, который был получен для группового способа адаптации с использованием функции adapt.
Групповой способ. Для этого представим обучающую последовательность в виде массивов
та double array:
S = [-1 -1/3 1/2 1/6; 1 1/4 0 2/3]; Т = Е-1 -5/12 11]; netl = train(net,P,T); TRAINWB, Epoch 0/10, MSE 0.793403/0. TRAINWB, Epoch 10/10, MSE 0.00243342/0. TRAINWB, Maximum epoch reached.
Параметры сети после обучения равны следующим значениям:
W = netl.IWU}
W= 1.9214 0.92599
У = sim(netl, Р)
У = -0.99537 -0.40896 0.96068 0.93755 ЕЕ = mse(y-T)
EZ = 1.3817е-003
Этот результат полностью совпадает с результатом последовательного обучения этой же сети.
Динамиические сети. Обучение динамических сетей выполняется аналогичным образом
использованием метода train.
Последовательный способ. Обратимся к линейной модели нейронной сети с одним входом и одним элементом запаздывания.
Установим начальные условия для элемента запаздывания, весов и смещения равными 0, а параметр скорости настройки равным 0.5:
net = newlin([-l 1],1,[0 1],0.5);
Pi = {0}; % Начальное условие для элемента запаздывания
net.IW{l} = [0 0]; % Значения весов
net.biasConnect =0; % Значение смещения
net.trainParam.epochs = 22;
Чтобы применить последовательный способ обучения, представим входы и цели какмассивы ячеек:
Р = {-1/2 1/3 1/5 1/4}; % Вектор входа
Обучим сеть формировать нужный выход на основе соотношения y(t) = 2p(t) + p(t-1)тогда
Т = { -1 1/6 11/15 7/10}; % Вектор цели
Используем для этой цели М-функцию train:
netl = train(net, P, T, Pi);
Параметры сети после обучения равны следующим значениям:
W = netl.IW{l}
W = 1.9883 0.98414
у = sim(netl, P)
у = [-0.99414] [0,17069] [0.7257] [0.6939]
ЕЕ = mse([y{:}]-[T{:}])
ЕЕ = 3.6514е-005
График зависимости ошибки обучения от числа циклов приведен на рис. 12
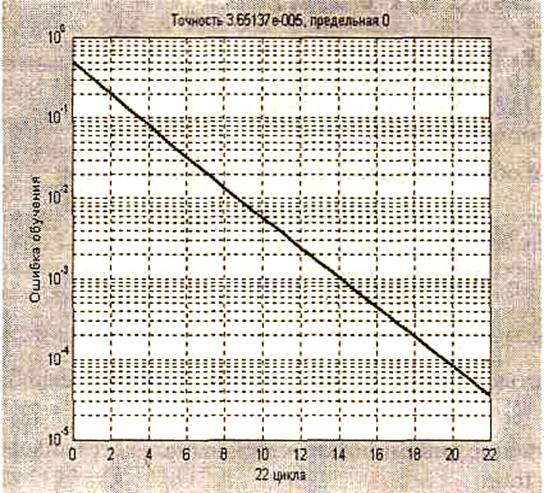
Рис. 12
Предлагаем читателю самостоятельно выполнить сравнение результатов обучения с результатами адаптации этой же сети.
Групповой способ представления обучающей последовательности для обучения динамических систем не применяется.
Методы обучения
Как только начальные веса и смещения нейронов установлены пользователем или с помощью датчика случайных чисел, сеть готова для того, чтобы начать процедуру ее обучения. Сеть может быть обучена решению различных прикладных задач - аппроксимации функций, идентификации и управления объектами, распознавания образов, классификации объектов и т. п. Процесс обучения требует набора примеров ее желаемого поведения - входов р и желаемых (целевых) выходов t; во время этого процесса веса и смещения настраиваются так, чтобы минимизировать некоторый функционал ошибки. По умолчанию в качестве такого функционала для сетей с прямой передачей сигналов принимается среднеквадратичная ошибка между векторами выхода ant. Ниже обсуждается несколько методов обучения для сетей с прямой передачей сигналов.
|
|
|
При обучении сети рассчитывается некоторый функционал, характеризующий качество обучения:

где J - функционал; Q - объем выборки; М - число слоев сети; q - номер выборки; SM - число нейронов выходного слоя; аq = [aqMi ] - вектор сигнала на выходе сети;
tq = [tqMi ]- вектор желаемых (целевых) значений сигнала на выходе сети для выборки с номером q.
Затем с помощью того или иного метода обучения определяются значения настраиваемых параметров (весов и смещений) сети, которые обеспечивают минимальное значение функционала ошибки. Большинство методов обучения основано на вычислении градиента функционала ошибки по настраиваемым параметрам.
Обучение однослойной сети
Наиболее просто градиент функционала вычисляется для однослойных нейронных ей. В этом случае М = 1 и выражение для функционала принимает вид:

где  - функция активации;-
- функция активации;-  сигнал на входе функции активации
сигнал на входе функции активации
для i-го нейрона;  - вектор входного сигнала; R - число элементов вектора входа;
- вектор входного сигнала; R - число элементов вектора входа;
число нейронов в слое;  - весовые коэффициенты сети.
- весовые коэффициенты сети.
Включим вектор смещения в состав матрицы весов  , а вектор входа дополним элементом, равным 1.
, а вектор входа дополним элементом, равным 1.
Применяя правило дифференцирования сложной функции, вычислим градиент функционала ошибки, предполагая при этом, что функция активации дифференцируема:
 (3.3)
(3.3)
Введем обозначение

(3.4)
и преобразуем выражение (3.3) следующим образом:
|
|
|
(3.5)
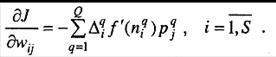
Полученные выражения упрощаются, если сеть линейна. Поскольку для такой сетивыполняется соотношение  , то справедливо условие.
, то справедливо условие.  В этом случае выражение (3.3) принимает вид:
В этом случае выражение (3.3) принимает вид:

(3.6)
Выражение (3.6) положено в основу алгоритма WH, применяемого для обучениями нелинейных нейронных сетей.
Линейные сети могут быть обучены и без использования итерационных методов а путем решения следующей системы линейных уравнений:
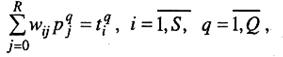
(3.7)
или в векторной форме записи:

(3.8)
Если число неизвестных системы (3.7) равно числу уравнений, то такая системами может быть решена, например, методом исключения Гаусса с выбором главного элемента. Если же число уравнений превышает число неизвестных, то решение ищется с использованием метода наименьших квадратов.
|
|
|
