 |


Закономерности движения автомобилей по дороге и требования к элементам дорог.
|
|
|
|
Фактический режим движения а/м по дороге определяется факторами:
-экспл. Свойства а/м
-ДУ
-водитель
Сила тяги, развиваемая движением а/м на ведущих колесах, расходуется на преодоление сил сопротивления качению.
Силы сопротивления качению:
1. Сила трения качения
2. Сила сопротивления воздуха
3. Сила сопротивления движения на подъем
4. Инерционная сила сопротивления движения
При движении автомобиля по дороге в зоне контакта шины колеса с дорожным покрытием возникают динамические вертикальные, продольные и поперечные касательные силы, значение которых зависит от типа автомобиля, шины колеса, нагрузки, природно-климатических условий и т. п.
На стоящее колесо действует только одна сила - вес автомобиля, приходящийся на это колесо. Особенностью автомобильного колеса является его эластичность. Под действием вертикальной силы колесо деформируется (рис. 3.1, а), в месте контакта радиус колеса меньше, чем в других частях колеса, не соприкасающихся с дорожным покрытием.
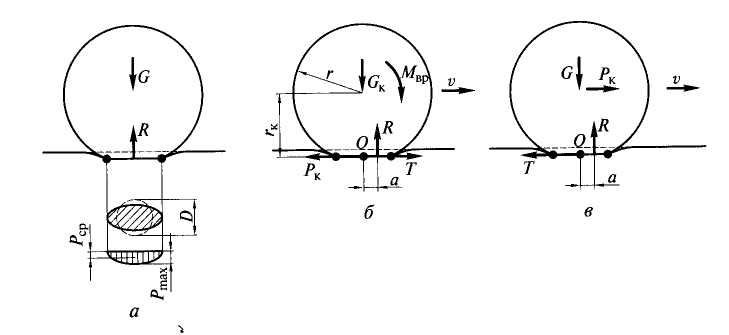
Рис. 3.1. Схема сил, действующих на дорожное покрытие:
а - стоящее колесо; б - ведущее колесо; в - ведомое колесо; D - размер пятна контакта колеса с дорожным покрытием; Рср, Р mах - соответственно средний и максимальный прогиб дорожного полотна; G - вес автомобиля; R - сила реакции; G к - вес автомобиля, приходящийся на колесо; M вр - вращающий момент; Т - сила трения; r к - расстояние от центра колеса до поверхности дорожного покрытия; r - радиус колеса;
а - расстояние от мгновенного центра скоростей О до линии действия силы реакции R; Р к - окружная сила;
Большое значение имеет поддержание высокой ровности дорожного покрытия, позволяющей снизить отрицательное воздействие автомобиля на покрытие. Наличие неровностей вызывает колебания автомобиля, вредные для человека, дорожного покрытия и самого автомобиля. Неожиданный наезд автомобиля на большой скорости на неровность может привести к разрушению дорожного покрытия и поломке конструктивных элементов автомобиля.
|
|
|
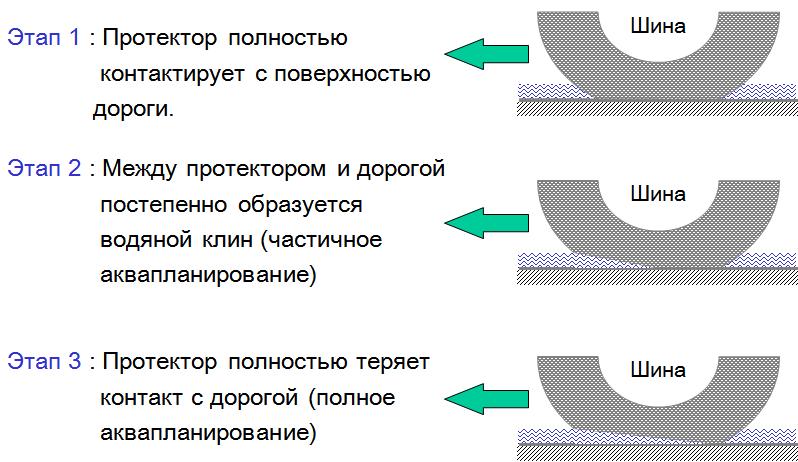
Особенно ухудшается взаимодействие колеса с дорогой при наличии водяной пленки на поверхности дорожного покрытия. Ухудшается сцепление шины колеса с дорожным покрытием, а при высоких скоростях (более 80 км/ч) возникает так называемое явление аквапланирования, заключающееся в образовании водяного клина между передними колесами автомобиля и поверхностью дорожного покрытия; при этом передние колеса автомобиля приподнимаются и автомобиль теряет управляемость.
На дорогах с твердыми покрытиями коэффициент сцепления зависит главным образом от трения скольжения между шиной и покрытием. На деформируемых дорогах коэффициент сцепления зависит прежде всего от сопротивления грунта срезу и от внутреннего трения в грунте. Выступы протектора ведущего колеса, погружаясь в грунт, деформируют и уплотняют его, увеличивая до некоторого предела сопротивление срезу. Однако затем начинается разрушение грунта, вследствие чего коэффициент сцепления уменьшается.
Большое влияние на коэффициент сцепления оказывает рисунок протектора. При истирании выступов протектора во время эксплуатации ухудшается сцепление шины с дорогой. Наименьший коэффициент сцепления имеют шины, у которых полностью изношен рисунок протектора.
В любых условиях движение колеса с изношенным протектором шин приводит к снижению коэффициента продольного и поперечного сцепления. Так, блокировка колес с изношенным протектором шин в большинстве случаев возникает при нажатии на педаль тормоза с усилием, равным 2/3 нормального усилия, необходимого для блокировки колес с хорошими шинами.
|
|
|
В таблице приведены примерные значения коэффициента сцепление колес с дорогой в зависимости от состояние дороги.
| Дорога | Поверхность | |
| Сухая | Мокрая | |
| С асфальтобетонным или цементобетонным покрытием | 0,7 - 0,8 | 0,35 - 0,45 |
| С щебеночным покрытием | 0,6 - 0,7 | 0,3 - 0,4 |
| Грунтовая | 0,5 - 0,6 | 0,2 - 0,4 |
| Обледенелая | 0,1 - 0,2 | |
| Покрытая снегом | 0,2 - 0,3 |
Уравнение движения автомобиля:
G’*f=G*f+-G*i+-G*j+Kв*w*V2/13
Где G’-нагрузка от ведущих колес на дорогу
G*f-сила трения качения
G*i-сила сопротивления движения на подъем
G*j-инерционная сила сопротивления движения
Кв*w*V2/13-сила сопротивления воздуха
Динамический фактор
D=f+-i+-j
Запас тягового усилия на единицу веса а/м, движущегося со скоростью V, который может быть израсходован на преодоление дорожных сопротивлений f и i, и на ускорение а/м
График зависимости дин.фактора от скорости а/м – динамическая характеристика а/м
Современный профиль а/д проектируется верт.прямыми(вогнутыми, выпуклыми). При движении а/м по данным кривым уклон изменяется, водителю для поддержания постоянной скорости приходится регулировать мощность двигателя.
Тормозной путь – длина пути, на котором водитель сможет остановить автомобиль, движущийся с расчетной скоростью.
Длина зависит от:
T1 – реакция водителя
Т2 – затраты времени на холостой ход педали
Т3 – период, в течение которого тормозное усилие в тормозных приводах, постепенно возрастая, достигает своего полного значения.
Т1+Т2+Т3=Тр
Тр – общее время (1с)
Где v – скорость в начале торможения
а – абсолютное значение отрицательного ускорения при торможении
ST – тормозной путь

Где YT – коэфф. Тормозной силы
КЭ – коэфф. Эфф. Торможения
Расчетный тормозной путь –

Где L1 – путь, проходимый за время реакции водителя
L2 – путь торможения
L3 – расстояние безопасности
*НЕОБХОДИМО НАРИСОВАТЬ РИСУНОК СО ВСЕМИ ЭТИМИ ПУТЯМИ В ПОСЛЕДОВАТЕЛЬНОСТИ 1-2-3!!!!! УКАЗАТЬ В КОНЦЕ УЧАСТКА ПРЕПЯТСТВИЕ, А В НАЧАЛЕ – МАШИНКУ!!!!!

Особенности тяговых расчетов автопоездов.
Уравнение динамического фактора:
D= f1+-i+-j
Где f1 – коэфф. Сопро. Качению автопоезда
Выводы:
1. Динамический фактор меньше (при большей общей массе сила тагя остается такой же)
2. Сопротивление движению у автопоезда выше
|
|
|
3. Увеличивается сопротивление воздуха при движении автопоезда
4. Уменьшается коэффициент сцепления ведущих колес
5. Уменьшается интенсивность торможения
6. Увеличивается тормозной путь
Расход топлива при автом. перевозках зав. От дорожных условий и режимов движения. При анализе вариантов дорог следует учитывать расход топлива в связи с необходимостью всемирной экономии нефти.Для оценки расхода топлива служит график экон.эфф-ти автомобиля, дающий расход топлива в литрах на 100км пробега при разных сопротивлениях дороги и скоростях движения. Наиболее выгодным типом дор.од. явл.тот, кот.обеспечивает в течение донного срока окупаемости строит.затрат наименьшую сумму тренспор.расходов и расходов на строит-во и экспл. дороги. Автомобильная составляющая себестоимомти перевозок склад.из расходов на топливо,смазочные материалы и шины,из з/платы водителей,из расходов на ремонт и обслуживание автом-ей,из стоимости аморт.отчислений. Значительная часть этих расходов зав.от типа и состояния покрытия.
4. Расположение дорог в плане.
Под трассой автомобильной дороги понимают пространственную кривую, совпадающую с осью дороги. Различают план трассы и продольный профиль, представляющие собой проекцию трассы на горизонтальную и вертикальную плоскости. План трассы состоит из круговых кривых в плане, переходных кривых и прямолинейных участков. Кривые в плане с разными радиусами показаны в рис. 1.13.1.
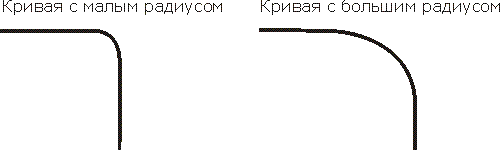
Рис. 1.13.1. Элементы плана трассы - кривые в плане
Характеристикой плана трассы является ее кривизна - сумма изменений направления (измеренных около центрального угла изменения направления) на единицу длины дороги, частота кривых в плане, которая является количеством кривых в плане на единицу длины дороги и количество единиц длины дороги, находящихся на кривой.
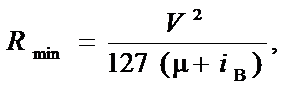
Радиус кривой в плане, обеспечивающий безопасное движение по кривой с расчетной скоростью без дополнительных мероприятий (переходных кривых, виражей и уширений проезжей части) определяется из условий устойчивости автомобиля против бокового заноса по формуле
|
|
|

где V – расчетная скорость движения автомобиля, км/ч;
 – коэффициент поперечной силы, принимаемый равным 0,05–0,1;
– коэффициент поперечной силы, принимаемый равным 0,05–0,1;
iП – поперечный уклон проезжей части при двускатном профиле, назначаемый при асфальтобетонном покрытии равным 0,02.
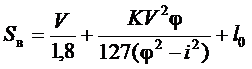
На сложных участках могут быть приняты меньшие радиусы, но с обязательным устройством переходных кривых, виража и уширения проезжей части, обеспечивающих большую безопасность движения,
где – коэффициент поперечной силы, принимаемый для относительно простых участков равным 0,1, для более сложных – 0,15–0,20;
iВ – уклон проезжей части на вираже, принимаемый для районов проектирования с частыми гололедами равным 0,04, в остальных случаях – 0,05.
Определение расстояний видимости
Расстояния видимости определяются по двум схемам:
Схема 1. Автомобиль встречает препятствие на той же полосе движения и должен остановиться перед ним (схема одиночного торможения).
 ,
,
Схема 2. Автомобиль встречается с другим автомобилем на той же полосе движения, и оба должны затормозить, не доезжая друг до друга на расстояние.
 ,
,
где K – коэффициент эксплуатационных условий торможения, принимаемый в обычных условиях 1,2, для трудных условий - 1,2;
 – коэффициент сцепления колеса автомобиля с дорогой, принимаемый для нормального состояния покрытия равным 0,5;
– коэффициент сцепления колеса автомобиля с дорогой, принимаемый для нормального состояния покрытия равным 0,5;
i – продольный уклон дороги, принимаемый при определении видимости, как величины нормативной равным нулю;
lo – расстояние запаса, равное 5–10 м.
Переходная кривая используется для того, чтобы кривизна трассы изменялась плавно, а не скачкообразно в месте сопряжения элементов пути с разной кривизной (прямая и круговая кривая, круговые кривые разных радиусов или направленные в разные стороны в виде буквы S (обратные кривые)). При резком изменении кривизны пути поперечные силы, действующие на транспортное средство, изменяются скачкообразно, что приводит к повышенному динамическому воздействию на дорогу (путь) и экипажную часть, увеличивая их износ, повышает вероятность вылета за пределы дороги (схода с рельсов) или опрокидывания транспортного средства и вызывает дискомфорт у пассажиров.
Особенно важно устройство переходных кривых при высоких скоростях движения, применении путевых кривых малого радиуса, тяжёлом подвижном составе, пропуске длиннобазового подвижного состава (особенно ПС с длинной жёсткой базой, например паровозов).
Расчёт переходной кривой
Переходную кривую рассчитывают таким образом, чтобы в своём начале она имела кривизну, равную нулю (как у прямой, то есть начало кривой является точкой перегиба), а потом плавно меняла кривизну, в конце достигая значения, обратного радиусу круговой кривой (и наоборот для схода с виража). Поскольку переходная кривая является частью виража, на ней обеспечивается нарастающий поперечный уклон дорожного полотна (подъём внешнего рельса на рельсовых дорогах) до уровня, равного уклону на круговой кривой (и наоборот для схода с виража).
|
|
|
Элементы виража
На кривых, радиусы которых меньше 3000 м для автомобильных дорог 1 категории и 2000 м - для других категорий, устраивают виражи, т. е. дорожному полотну придают односкатный поперечный профиль с наклоном к центру кривой.
Односкатный профиль сохраняется на всем протяжении круговой кривой. Переход от односкатного профиля к нормальному, двухскатному, так называемый отгон виража, делается на переходных кривых или на прямых участках, примыкающих к закруглению.
На кривых малых радиусов вираж имеет дополнительное уширение проезжей части, отвод которого осуществляется также в пределах переходной кривой.
Общая схема виража показана на рис. 196. Основными элементами виража являются:
1) уклон виража, т. е. величина односкатного поперечного уклона дорожного полотна;
2) длина отгона виража;
3) длина виража;
4) величина уширения проезжей части.
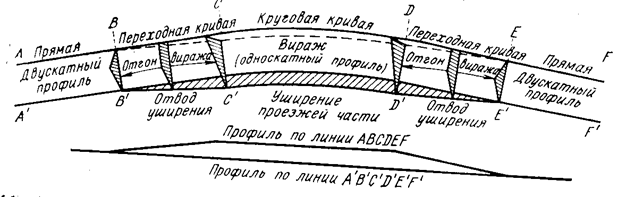
Рисунок 196 - Схема виража автодороги
Поперечный уклон виража зависит от радиуса кривой. При радиусах 3000 - 1000 м уклон виража назначают равным поперечному уклону проезжей части при двухскатном профиле. Для радиусов кривых меньше 1000 м уклон виража проектируют больше поперечного уклона проезжей части. Наибольший уклон виража допускают равным 60%о (R  600 м).
600 м).
Отгон виража представляет собой плавный переход от двухскатного поперечного профиля к односкатному, при этом главное изменение претерпевает наружная часть дорожного полотна.
Если уклон виража равен поперечному уклону проезжей части, то переход от двухскатного профиля к односкатному осуществляется путем вращения наружной половины полотна около оси дороги. Внутренняя часть полотна остается без изменения.
Клотоиды
Одним из наиболее эффективных средств получения при трассировании наилучших инженерных решений является обеспечение зрительной плавности автомобильной дороги в пространстве. Решить эту задачу традиционными приемами трассирования обычно не удается в связи с тем, что план трассы при традиционной технологии представляется сочетанием прямых и круговых кривых. Последние при радиусе R≤2000м сопрягаются с прямыми участками трассы посредством относительно коротких переходных кривых, нормируемых СНиП 2.05.02-85 из условия допустимого значения нарастания центробежного ускорения.
При проектировании автомобильных дорог нашли широкое применение как в СССР, так и за рубежом переходные кривые типа клотоиды, характеризуемые линейным законом увеличения кривизны по длине кривой и наилучшим образом отвечающие условиям движения автомобилей с постоянными скоростями. При этом кривую на участке от начала ее (с R==∞) до любой ее точки с радиусом R==Rn принято называть клотоидой. Кривую же от любой точки с радиусом R==Rк1 до произвольной точки с радиусом R==R к2 называют отрезком клотоиды.
Если при традиционном проектировании плана автомобильных дорог переходная кривая представляет собой вспомогательный элемент трассы, то при клотоидном трассировании переходная кривая выступает уже как самостоятельный элемент наравне с круговыми кривыми и прямыми, при этом длины клотоид и их параметры принимаются существенно большими, чем это нормируется СНиП 2.05.02-85.
По сравнению с обычной трассой для клотоидной трассы характерно наличие существенно большего числа типов закруглений:
биклотоида, симметричная при A1=A2; несимметричная при A1≠A2.биклотоида с круговой вставкой, симметричная при A1=A2; несимметричная при A1≠A2 коробовая (составная) клотоида;комбинированное закругление.
Клотоидную трассу проектируют по топографическим планам, аэроснимкам, а на стадии ТЭО и ТЭР—и по крупномасштабным картам. Рассмотренные выше типы закруглений определяют положение магистрального хода, который представляют в общей системе координат и выносят в натуру.
Каждое закругление определяет один угол поворота магистрального хода, от которого и ведут разбивку трассы.
Нередко вынос трассы в натуру осуществляют от магистрального хода. представленного касательными к главным точкам трассы (точкам сопряжения элементов). В САПР-АД предусмотрен также случай выноса в натуру трассы от произвольного магистрального хода. Аналитический автоматизированный расчет трассы при этом является обязательным.
Таким образом, клотоидная трасса в общем случае представляется сочетанием соизмеримых по длине элементов: клотоид, отрезков клотоид, круговых кривых и прямых. Представление о клотоидной трассе как состоящей из одних только клотоид является неправильным.
Боковая видимость
Для дорог в густонаселенной местности, а также на пересечениях с автомобильными и железными дорогами в одном уровне обеспечение безопасности движения требует достаточной боковой видимости придорожной полосы. Максимальное необходимое расстояние боковой видимости:
Sбок= Vбок*Vам/Sв
где vам – расчетная скорость автомобиля;
vбок – скорость движения транспортного средства или пешехода по пересекаемой дороге; Sв – расчетное расстояние видимости из условия остановки перед препятствием.
СНиП 2.05.02-85* требует обеспечивать боковую видимость от кромки проезжей части, равную 25 м на дорогах I-III категорий и 15 м на дорогах IV, V категорий.
Для пешеходов следует принимать скорость бегущего человека, то есть vбок = 10 км/ч.
|
|
|
