 |


Видимость остановочного пути
|
|
|
|
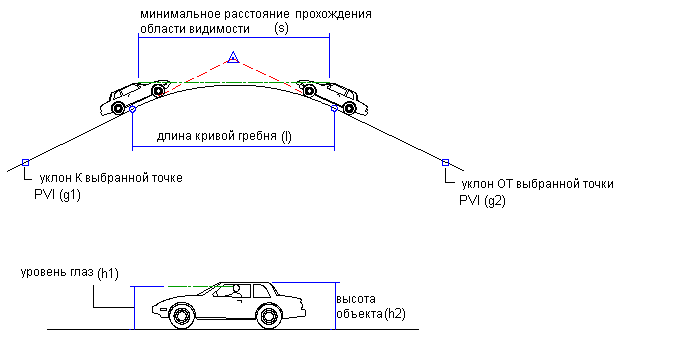
Такой метод проектирования для выпуклых кривых минимизирует длину кривой. Кривая должна быть достаточно длинной, чтобы водитель стандартного авомобиля мог всегда увидеть объект прежде, чем он окажется в пределах максимального остановочного пути для разработанной скорости передвижения.
Диаграмма видимости остановочного пути

Видимость расстояния обгона
Этот метод для выпуклых кривых обеспечивает минимальную длину кривой. Кривая должна быть достаточно длинной, чтобы водитель стандартного автомобиля мог всегда видеть приближающийся автомобиль в пределах безопасного расстояния для проектной скорости передвижения.
Диаграмма видимости расстояния обгона
Видимость расстояния фар
Этот метод для вогнутых кривых обеспечивает минимальную длину кривой. Кривая должна быть достаточно длинной, чтобы в условиях ночного вождения фары стандартного автомобиля освещали дорогу на безопасное расстояние сверх остановочного пути для проектной скорости передвижения.
Диаграмма видимости расстояния фар

Удобства пассажира
Такой метод проектирования для вогнутых вертикальных кривых обеспечивает минимальную длину кривой. Кривая должна быть достаточно длинной, чтобы пассажиры в стандартном автомобиле не подвергались чрезмерным инерционным силам при передвижении по кривой с проектной скоростью.
Диаграмма удобств пассажира

На вершине подъема обычно ограничена видимость; чем круче местность, тем круче подъем. В связи с тем, что пониженная видимость увеличивает риск ДТП, можно ожидать, что дороги, имеющие много крутых подъемов и спусков, имеют большее количество ДТП, чем дороги с меньшим количеством крутых подъемов и спусков. Однако одно из шведских исследований (Bjorketun, 1991), где сравнивались дороги с различным количеством участков дороги, расположенных на крутых подъемах (с вертикальными кривыми менее 8000 м), не подтвердили таких ожиданий. Исследования показали, что вариации в доле участков дороги, располагающихся на крутом подъеме, не оказывали влияния на количество ДТП. Возможным объяснением этому является то, что водитель принимает во внимание ограничение видимости на вершине подъема и снижает скорость или повышает внимание.
|
|
|
Движение автомобиля на спуск представляет высокую опасность. Особенно опасным является наличие спуска большого протяжения с кривой в плане в конце спуска. При этом нет ограничения видимости. Основной причиной ДТП на спуске является высокая скорость движения, при которой водитель не может справиться с управлением автомобиля, особенно в случае отказа тормозов.
Поперечный профиль дороги
Попер.проф. – изображает сечение дороги вертикальной плоскостью перпендикулярной к оси дороги в уменьшенном масштабе.
Необходимое число полос движения определяется по формуле

где α – коэффициент перехода от суточной интенсивности движения к часовой (α = 0,1); Kп Nр – приведенная интенсивность
движения, прив. ед./сут. (Kп Nр = прив Nр); ε – коэффициент сезонной неравномерности изменения интенсивности движения (ε = 1); z – расчетный коэффициент загрузки дороги движением, зависящий от уровня удобства движения (z = 0,3 … 0,5);
γ – коэффициент, зависящий от рельефа местности (для равнинного рельефа – 1,0; пересеченного – 0,8; сильно пересеченного – 0,6); Р – пропускная способность одной полосы движения определяется по формуле
Р = ВРmax, авт./ч,
где В – итоговый коэффициент снижения пропускной способности, равный произведению частных коэффициентов β1 … β15, отражающих влияние различных элементов дороги на пропускную способность, их значения приведены в [3]; Рmax – максимальная пропускная способность полосы движения, авт./ч (для двухполосных дорог – 2000 авт./ч в оба направления; трехполосных – 4000 авт./ч в оба на правления; четырехполосных – 2000 авт./ч по одной полосе движения).
|
|
|
Ширина полосы движения определяется отдельно для грузовых и легковых автомобилей, преобладающих в составе транспортного потока из условия встречного движения автомобилей, движущихся с расчетной скоростью. Ширина полосы движения зависит от ширины кузова автомобиля а, его колеи с, величины предохранительной полосы между колесом автомобиля и кромкой проезжей части y, величины зазора безопасности между кузовом автомобиля и границей полосы х:
x = y = 0,5 + 0,005Vр, м.
Тогда для двухполосной дороги с двусторонним движением ширина одной полосы движения определяется по формуле
П2=(а+с)/2 +1,0+0,01Vp, м
а общая ширина проезжей части
bп.ч = Пг + Пл, м,
где Пг, Пл – ширина полосы движения для грузового и легкового автомобилей соответственно, м.
Обо́чина — элемент дороги, примыкающий непосредственно к ПЧ на одном уровне с ней, отличающийся типом покрытия или выделенный с помощью разметки.
Обочина может быть неукреплённой и укреплённой.
Обочина не предназначена для нормального движения механических ТС
Обочина предназначена для:
· остановки и Стоянки транспортных средств
· разворота, если его нельзя произвести без заезда на обочину
· на очень узких дорогах — для разъезда транспортных средств;
· при отсутствии тротуаров— для движения пешеходов
· при отсутствии велосипедных дорожек — для движения велосипедов и мопедов (если это не создаёт помех пешеходам, иначе велосипеды и мопеды должны двигаться по проезжей части)
Ширина земляного полотна автомобильной дороги определяется по формуле: Вз.п = bп.ч + 2bоб, м, где bоб – ширина обочины, м, определяется в зависимости от категории дороги
|
|
|
