 |


Задание на лабораторную работу
|
|
|
|
1. Изучить прикладную программу «Эмулятор системы ситуационного распознавания образов».
2. Оценить длительность работы алгоритма распознавания образов в соответствии с вариантом задания.
3. Оформить отчет о проделанной лабораторной работе.
Варианты заданий
Варианты заданий для выполнения лабораторной работы представлены в таблице 6.2.
Таблица 6.2 – Варианты заданий для выполнения лабораторной работы №6
| № п/п | Кол-во Q | Кол-во S | Длины Dij | Правило отбора Q | Способ выбора S |
| 1 | произвольное | 1 ÷ 100 | 20 ÷ 58 | доминирующий, тандемный, командный | вероятностный |
| 2 | 100 | 1 ÷ 50 | 32 ÷ 64 | рулеточный | |
| 3 | 1 ÷ 100 | произвольное | 16 ÷ 64 | вероятностный | |
| 4 | больше 1000 | 100 ÷ 1000 | произвольные | доминирующий и тандемный | рулеточный |
| 5 | произвольное | 100 ÷ 1000 | 1 ÷ 100 | вероятностный | |
| 6 | 1 ÷ 20 | произвольное | 100 ÷ 1000 | доминирующий и командный | рулеточный |
| 7 | 100 ÷ 1000 | произвольное | 1 ÷ 50 | вероятностный | |
| 8 | произвольное | 1 ÷ 50 | 64 | тандемный и командный | вероятностный и рулеточный |
| 9 | произвольное | 1 ÷ 100 | 128 | ||
| 10 | 200 ÷ 500 | 100 ÷ 250 | произвольное | доминирующий | |
| 11 | меньше 1000 | произвольное | произвольное | тандемный | вероятностный |
| 12 | 500 ÷ 1000 | произвольное | 100 ÷ 1000 | командный | вероятностный |
| 13 | произвольное | 1 ÷ 100 | 20 ÷ 58 | доминирующий, тандемный, командный | вероятностный |
| 14 | 100 | 1 ÷ 50 | 32 ÷ 64 | рулеточный | |
| 15 | 1 ÷ 100 | произвольное | 16 ÷ 64 | вероятностный | |
| 16 | больше 1000 | 100 ÷ 1000 | произвольные | доминирующий и тандемный | рулеточный |
| 17 | произвольное | 100 ÷ 1000 | 1 ÷ 100 | вероятностный | |
| 18 | меньше 1000 | произвольное | произвольное | тандемный | вероятностный |
| 19 | 500 ÷ 1000 | произвольное | 100 ÷ 1000 | командный | вероятностный |
| 20 | произвольное | 100 ÷ 1000 | 1 ÷ 100 | тандемный | рулеточный |
|
|
|
6.5 Контрольные вопросы
1. Назовите преимущества ситуационного распознавания образов.
2. Назовите факторы, влияющие на достоверность распознавания образов.
3. Что такое порог распознавания и разделяющая функция?
4. Назовите критерии оценки эффективности систем распознавания образов.
5. Назовите достоинства сигнатурного подхода?
Лабораторная работа № 7. Ассоциативно-мажоритарная модель распознавания образов
Цель работы: освоить технологию оперативной оценки состояния протяженного объекта на основе ассоциативно-мажоритарной модели распознавания образов
Теоретическая часть
Распознавание состояния протяженных в пространстве объектов, например, автомобильных дорог является одним из основных процессов в системе управления качеством автомобильных дорог, требующих больших материальных и временных затрат [8]. Результаты распознавания состояния дорожного полотна (ДП) должны служить надежной информационной базой для решения управленческих задач.
На рисунке 7.1 представлены схема протяженного в пространстве объекта на примере автомобильной дороги.

| 
|
Рисунок 7.1 – Схема дорожного полотна и маршрут движения
«Оренбург – Исянгулово» по трассам P-314 и P-336
Каждый участок Ci дороги длиной l и шириной s характеризуется следующими показателями, влияющими на безопасность дорожного движения: продольным α и поперечным β уклоном, радиусом виража конкретной категории качества ДП r, шероховатостью γ и коэффициентом продольного сцепления φ.
К исходным данным задачи идентификации относится [8]: множество классов образов Q = { q 1, q 2 ,…, qj,…, qn }, характеризующих категорию ДП; множество информативных признаков S = { s 1, s 2 ,…, si,…, sm } с известными распределениями значений P (s). Для формализации задачи распознавания использованы условные обозначения, представленные в лабораторной работе № 6.
|
|
|
Математическая модель распознавания qx представлена в лабораторной работе №6 формулами (6.1) – (6.9).
Представленная модель универсальна и может быть использована для распознавания состояний сложных объектов при различных постановках задачи, в частности: при контроллинге и отборе персонала в социально-экономических системах; при определении категории дорожного полотна и соответствующей безопасной скорости транспорта по принятой в РФ классификации категорий автомобильных дорог согласно ГОСТ Р 52398-2005; в подсистемах мониторинга состояний региональных транспортных систем. При этом изменяется лишь выражение для вычисления частных параметров оценки ассоциативности значения < si > признака si из множества S.
На рисунке 7.2 представлена структурная схема высокопроизводительной системы идентификации на основе ассоциативно-мажоритарной модели распознавания образов, позволяющей оценивать состояние ДП во время движения автомобиля.
Входными данными для системы оценки являются:
- вектор параметров регистрации R= { S, n, m };
- режим работы системы U (обучение или распознавание).
Потоки измерительной информации определяются перечнем датчиков и режимами работы средств регистрации и первичной обработки данных. Эффективность данной системы в основном определяется временем (производительностью) H проведения диагностирования и достоверностью D принимаемых решений.
Подсистема регистрации и первичной обработки данных о ДП формирует информационные потоки для подсистемы обучения ассоциативной модели и подсистемы идентификации ровности ДП.
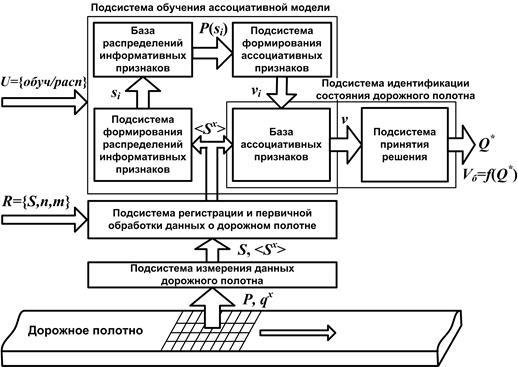
Рисунок 7.2 – Структурная схема системы идентификации состояния ДП
Формирование базы распределений информативных признаков P основано на принципе работы амплитудных анализаторов сигналов, что обеспечивает высокое быстродействие, обусловленное простотой алгоритма формирования произвольных распределений. На этапе обучения ассоциативной модели подсистема управления последовательно выбирает соответствующий признак дорожного полотна и организует регистрацию его распределения в системе. По окончании регистрации подсистема формирования ассоциативных признаков по полученным оценкам распределений формирует базу ассоциативных признаков. В результате идентификации система относит диагностируемое состояние ДП к одному из семи классов ровности ДП по международной классификации индексов ровности.
|
|
|
Применение предложенного подхода позволяет снизить затраты на проведение эксперимента . Ассоциативная модель распознавания образов реализована в виде аппаратно-программного устройства и пакета программ [4]. Представленный подход может также найти применение в системах технической диагностики сложных промышленных объектов металлургического, нефтегазодобывающего профиля, а также в системах контроля и управления доступом в АСУ ТП.
Порядок выполнения работы
1. Войти в объектно-ориентированную среду программирования «Borland Delphi 7». Разработать общий вид экранной формы прикладной программы так, как показано на рисунке 7.3.
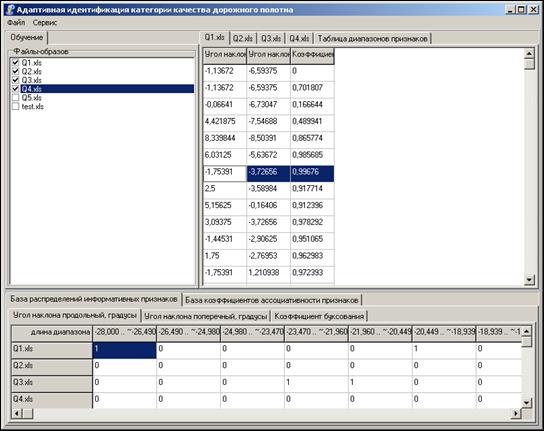
Рисунок 7.3 – Общий вид экранной формы в процессе работы программы
2. Используя теоретический материал, представленный в пункте 7.1, реализовать алгоритм оценки состояния ДП на основе ассоциативно-мажоритарной модели распознавания образов.
3. В программе должна быть предусмотрена возможность настройки следующих параметров: количества информативных признаков и классов образов-эталонов; объема памяти (диапазона адресов), приходящегося на каждую страницу ассоциативного ЗУ; ведение журнала вычислительного эксперимента.
4. В программе должна быть предусмотрена возможность постобработки результатов вычислительных экспериментов и формирования диаграммы распределений значений информативных признаков.
Прикладная программа должна иметь гибкую структуру и возможность модификации.
|
|
|
