 |


I. По степени участия человека-оператора
|
|
|
|
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ.
 |



 НЕТ! ДА!
НЕТ! ДА!
| |||
| |||

 |  |  | |||

 |

 | |||
 |

|


 |
|
|
|
|
|




…Автомат – прибор, с помощью внутреннего мехахизма подражающий действиям живых существ
Эк. «Просвящение», 1900г.
…Плоды науки – это не простые плоды, точнее, плоды упрощенные… Джералбд Уейнберг.
Немного истории…
 |
1. Автоматика - отрасль «НиТ» занимающаяся разработкой и теорией устройств, обеспечивающих процессы АУиР без непосредственного участия человека.
 ТАУиР – наука, занимающаяся изучением свойств САУ и разработкой методов их анализа и синтеза.
ТАУиР – наука, занимающаяся изучением свойств САУ и разработкой методов их анализа и синтеза.
2. САУ - динамическая система (dynamis – сила, греч.) совокупность взаимодействующих устройств (УУ + ОУ) в которых протекающие процессы определяются НАЧ.УС., связями и воздей-ствиями.

G(t) – вектор входящих координат
Х(t) – вектор выходящих координат
F(t) –вектор внешних воздействий
Одномерная система:


 - сумматор с отрицательной обратной связью
- сумматор с отрицательной обратной связью
 2.1 Переменые – физические величины, которые характеризуют сосотояние и положение нашего самолета во времени и пространстве
2.1 Переменые – физические величины, которые характеризуют сосотояние и положение нашего самолета во времени и пространстве
2.2 Воздейсвия – причины, которые вызывают изменение координат.
Виды воздействий:
- внешние:
1) заданные команды (внешнее управление) g(t)¸G(t);
2) возмущения f(t)¸F(t)
|
|
|
- внутренние (управляющие), возникающие между отдельными элементами системы, z(t)¸U(t))
2.3 Движение – следствие воздействия сил на систему, которое приводит к изменению координат во времени и пространстве
X(t) - вектор состояний
Rx – пространство состояния
2.4 Пространства:
Rx: X(t) = ||x1(t),x2(t),...,xn(t)|| - пространство состояний;
 RU
RU  : Z(t)=U(t) =||u1(t),u2(t),...,un(t)|| - пространство управления;
: Z(t)=U(t) =||u1(t),u2(t),...,un(t)|| - пространство управления;
 RF
RF  : F(t) = ||f1(t),f2(t),...,fn(t)|| - пространство возмущающих воздействий.
: F(t) = ||f1(t),f2(t),...,fn(t)|| - пространство возмущающих воздействий.
3. Управление - целесообразное воздействие, приводящее к желаемому изменению управляемых переменных.
Автоматическое управление - целесообразное воздействие, приводящее к желаемому изменению управляемых переменных без вмешательства человека.
Регулирование – поддержание постоянными управляемых переменных или изменение их по требуемому закону.
Режимы САУ:
- статический:  ;
;  ;
;  ,
,
- динамический:  ;
;  ;
;  .
.
Задачи, решаемые ТАУ
1. Математическая модель: X(t)=X[X(t0),V(t),F(t),G(t)]
2. Анализ (созерцание):
 Дано: начальные состояния X(t0), V(t0,t), F(t0,t),G(t0,t)
Дано: начальные состояния X(t0), V(t0,t), F(t0,t),G(t0,t)
Требуется определить X(t)
3. Синтез (созидание):
Дано: X(t)треб., F(t0,t), G(t0,t)
Требуется определить алгоритмы управления V(t)
4. Техническая Реализация Алгоритмов (ТРА) – схемы, конструкция, обеспечение
НУ, А КИБЕРНЕТИКА – ЭТО ЕЩЁ ЧТО ТАКОЕ?
От греческого «кибернетис»: управляющий, рулевой,кормчий.
…Кибернетика занимается изучением систем любой природы, способных воспринимать, хранить и преобразовывать информацию и использовать её для управления и регулирования… /А.Н. Колмогоров/
… Высший автомат может быть опасен, но не своей злой волей, а злым умыслом создавших его!!!
Классификация САУ.
I. По степени участия человека-оператора

 А - Система ручного управления
А - Система ручного управления
 Б - Полуавтоматическая СУ (часть задач, с которыми летчик не справляется, подается на автоматы)
Б - Полуавтоматическая СУ (часть задач, с которыми летчик не справляется, подается на автоматы)
|
|
|
 В - Автоматизированная СУ (информация поступает на бортовую цифровую вычислительную машину БЦВМ, которая подсказывает летчику алгоритм управления)
В - Автоматизированная СУ (информация поступает на бортовую цифровую вычислительную машину БЦВМ, которая подсказывает летчику алгоритм управления)
 Г - САУ (используется автопилот)
Г - САУ (используется автопилот)
 измеряемая (наблюдаемая) информация.
измеряемая (наблюдаемая) информация.
А – алгоритм подачи сигнала на исполнительный механизм.
II. По принципу управления:
- замкнутые (работают по отклонению)
Наличие обратной связи
 (положительная обратная связь)
(положительная обратная связь)

 (отрицательная обратная связь).
(отрицательная обратная связь).
Принцип отрицательной обратной связи:

При изменении угла тангажа на управляющее устройство поступает разность сигналов, и управляющее устройство возвращает самолет в исходное положение.
- разомкнутые (трудно реализовать)

- комбинированные (наиболее удобные в применении)

- адаптивные системы (приспосабливаются к изменению условий)
А – алгоритм подстройки (УУ не постоянно по законам управления)
УАС – устройство анализа сигнала (входного)
УАО – устройство анализа объекта
ВУ – вычислительное устройство
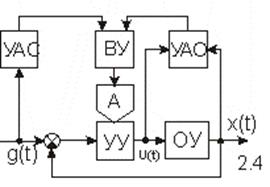
Типичная функциональная схема САУ.

1 Вычислительный блок
2 Привод
3 Объединенный ОУ
4 Измерительный блок
ЗЭ - задающий элемент
ЭС – элемент сравнения, сумматор
ПЭ - преобразующий элемент
УЭ - управляющий элемент
ИМ - исполнительный механизм
УО - управляющий орган
ОУ – объект управления (рули)
ЧЭ - чувствительный элемент
ДИ – датчик информации
КУ – корректирующее устройство
III. По виду команды:
1). САС – системы автоматической стабилизации (регуляторы) поддерживают выходную координату на заданном значении.
 ,
, 
2). ПрСАУ – программные САУ. Входная команда меняется во времени в соответствие с заданной командой.
 ,
,  .
.
3). ССАУ – следящие САУ. Выходная координата меняется в зависимости от входной.
 ,
,  .
.
IV. По количеству первичной информации:
1). Обычные (много первоначальной информации, заложенной при проектировании системы);
2). Адаптивные;
3). Игровые (минимальное количество первичной информации).
V. По наличию установившейся статической ошибки  .
.
САУ уровня жидкости в емкости



Признак статической системы:

 ,
,
 .
.
Признаки астатической системы:
|
|
|

 ,
,
 ,
,
 .
.
VI. Прочие признаки:

1). Число контуров:
- одноконтурные
- многоконтурные.
 2). Число выходных координат
2). Число выходных координат  :
:
- одномерные
- многомерные:
а) несвязанные 
б) связанные  .
.
3) Источники энергии:
- электрические
- гидравлические
- пневматические
…
- комбинированные.
4) Функциональное назначение: регуляторы высоты, скорости полета.
5) Режим (временной) работы:
- непрерывного действия
- дискретные (релейные, импульсные, цифровые).
6) Математическая модель.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ САУ
Линейные – Нелинейные
Стационарные (с постоянными коэффициентами) – Нестационарные (с переменными коэффициентами)
Детерминированные (определенная зависимость) – Стохастические
|
|
|
