 |


Задание 1. Синтез следящей системы
|
|
|
|
Синтез систем автоматического управления
Учебно-практическое пособие по дисциплине
«Теория автоматического управления»
 Сызрань 2011
Сызрань 2011
Составитель: В.И.Будин
УДК 681.51
Синтез систем автоматического управления: Учебно-практическое пособие/ Филиал Самар. гос. техн. ун-та в г. Сызрани; Сост. В.И. Будин. Сызрань, 2011. 51 с.
Изложены основные вопросы синтеза систем автоматического управления с применением логарифмических частотных характеристик и методики последовательной коррекции с подчиненным регулированием координат. Даны рекомендации по использованию пакета прикладных программ Control System Toolbox на всех этапах проектирования.
Пособие предназначено для студентов всех форм обучения специальности «Электропривод и автоматика промышленных установок и технологических комплексов» и направлений подготовки бакалавров «Электроэнергетика и электротехника» и «Автоматизация технологических процессов и производств» при выполнении курсового проекта по дисциплине «Теория автоматического управления».
Табл. 6. Ил. 18. Библиогр.: 3 назв.
Утверждено научно-методическим советом электротехнического факультета от 11 февраля 2011 г.

СОДЕРЖАНИЕ
1. Введение………………………………………………………..4
2. Техническое задание…………………………………………..6
3. Цель, содержание и объем курсовой работы…………….....13
4. Построение структурной схемы исходной системы……….14
5. Определение передаточных функций звеньев САУ……….15
6. Исследование исходной системы………………………..….21
7. Коррекция системы автоматического управления….…….28
8. Реализация регуляторов……………………………………...42
|
|
|
9. Анализ скорректированной системы……………………….50
10. Построение функционально-принципиальной схемы скорректированной САУ…………………………………….50
11. Заключение…………………………………………………...51
12. Библиографический список………………………………….51
Список использованной литературы…………………………….51
 |
Введение
Задача синтеза системы автоматического управления (САУ) заключается в выборе такой ее структуры, параметров, характеристик и способов их реализации, которые при заданных ограничениях наилучшим образом удовлетворяют требованиям, предъявляемым к системе.
Обычно определенная часть проектируемой системы задана. Она является исходной или нескорректированной САУ. Параметры ее основных функциональных элементов известны. В такой постановке задача проектирования сводится к определению управляющего устройства (УУ), обеспечивающего заданные показатели качества системы.
Наиболее простым, наглядным и хорошо разработанным инженерным методом синтеза САУ является метод логарифмических частотных характеристик (ЛЧХ). Его идея основана на однозначной связи между переходным процессом в системе и ее ЛЧХ. Исходя из этого по заданным точностным и динамическим показателям качества сначала строится желаемая ЛЧХ, а затем путем графического построения осуществляется приближение к ней частотных характеристик исходной системы. В результате такой процедуры определяется ЛЧХ управляющего устройства. Корректирующее устройство может включаться в канал управления последовательно или встречно-параллельно. Вид коррекции предопределяет некоторые особенности синтеза, обусловленные методикой получения ЛЧХ устройства управления.
Проектирование САУ с применением ЛЧХ обеспечивает наиболее широкие возможности удовлетворения противоречивых требований к статическим и динамическим свойствам системы управления. Однако имеется существенное практическое ограничение в применении данного метода синтеза. Оно предопределяется, как правило, сложностью получаемой математической модели УУ и соответственно связано с трудностью реализации этой коррекции и её настройки в реальной САУ.
|
|
|
Для упрощения вида УУ в настоящее время оно разбивается на ряд корректирующих устройств (КУ) путем организации в САУ внутренних вложенных друг в друга контуров, каждый из которых управляется соответствующим регулирующим устройством (регулятором).
Для расчета внутренних контуров целесообразно использовать методику последовательной коррекции с подчиненным регулированием координат. В её основе лежит настройка контуров по быстродействию на так называемый модульный оптимум [2]. В результате получаются обычно простейшие КУ в виде типовых промышленных регуляторов (ПИД, ПИ и т.д.). Такие регуляторы удобны в настройке и эксплуатации.
Последний (главный) контур синтезируется с помощью выше упомянутого классического метода ЛЧХ. Благодаря перераспределению коррекции по всем контурам, регулятор основного (внешнего) контура также получается в виде простого легко настраиваемого активного или пассивного фильтра.
В настоящее время при проектировании и исследовании САУ широко используются специальные программно- вычислительные системы. Наиболее применяемой в области автоматики является среда MatLab с рядом своих приложений, в особенности, таких как Control System Toolbox и Simulink [3]. Их использование значительно упрощает все рутинные расчеты и исключает вычислительные ошибки. Поэтому данные пакеты расширения MatLab следует использовать на всех этапах проектирования, где это целесообразно.
В рамках курсового проектирования осуществляется синтез САУ согласно заданию кафедры, которая определяет как содержание, так и объем курсовой работы (КР). Решаемые при этом задачи преследуют учебные цели, которые в основном сориентированы на закрепление и расширение знаний студентов по теории автоматического управления, развитие навыков самостоятельной работы с технической литературой, практическое применение современных инженерных методов, в том числе ЭВМ, при разработке и исследовании реальных САУ.
|
|
|
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Техническое задание на проектирование включает в себя исходные данные, позволяющие произвести синтез САУ. К ним относятся сведения о принципе действия нескорректированной системы, ее функциональная схема, параметры всех звеньев САУ, показатели качества проектируемой системы.
Кроме того, могут быть предъявлены некоторые другие требования, которые вводятся для индивидуализации содержания КР. Варианты заданий распределяются и утверждаются кафедрой.
Задание 1. Синтез следящей системы
Исходная нескорректированная система представлена на рис. 2.1. Варианты задания приведены в табл. 2.1.
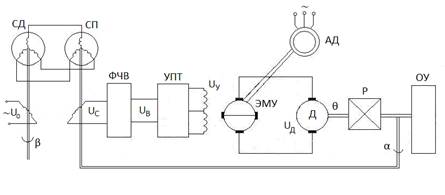
Рис. 2.1. Следящий электропривод на основе системы ЭМУ-Д
В функциональной схеме следящего электропривода обозначено: Д – электродвигатель постоянного тока независимого возбуждения, ЭМУ – электромашинный усилитель, СД – сельсин-датчик, СП – сельсин-приемник, ФЧВ – фазочувствительный выпрямитель, УПТ – усилитель постоянного тока, АД – асинхронный двигатель, Р – редуктор, ОУ – объект управления.
Задающим воздействием в этой схеме является угол поворота ротора сельсина-датчика β, регулируемой координатой − угол поворота выходного вала редуктора α, который измеряется сельсином-приемником. Пара СД и СП включены по трансформаторной схеме, которая позволяет формировать сигнал рассогласования (переменное напряжение UС), пропорциональный ошибке слежения  . Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
. Этот сигнал подается на ФЧВ, который выпрямляет напряжение UС с учетом его величины и фазы. Последняя определяется знаком δ, отсюда следует, что выходное напряжение фазо-чувствительного выпрямителя UВ имеет пропорциональную зависимость от ошибки δ.
Постоянное напряжение UВ усиливается УПТ и подается в прямую и обратную обмотки управления ЭМУ в соответствие со знаком UВ. Электромашинный усилитель выполняет роль усилителя мощности. По существу – это двухкаскадный генератор постоянного напряжения, который приводится в движение от асинхронного двигателя. Последний питается от трехфазной сети и вращается с некоторой постоянной скоростью. Напряжение на выходе электромашинного усилителя UД пропорционально напряжению, подаваемому в обмотку управления UУ. Под действием напряжения UД двигатель вращается с определенной скоростью в прямом или обратном направлении в зависимости от знака UД.
|
|
|
Редуктор Р в следящих системах обычно существенно понижает обороты, т.е. его коэффициент передачи значительно меньше единицы. В данной системе объектом управления по существу является двигатель с редуктором, т.к. обратная связь организована по положению вала Р. Однако с учетом того, что ОУ жестко связан с валом Р можно считать, что объектом управления является система Д - ОУ. Работает САУ следующим образом. Если угол поворота  не изменяется, то α=β и δ= 0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигате-
не изменяется, то α=β и δ= 0, все напряжения UС, UВ, UУ, UД равны нулю и двигатель не вращается. При повороте вала СД на некоторый угол в ту или иную сторону возникнет рассогласование , появятся соответствующие напряжения, включая напряжение на двигате-
Таблица 2.1
| Наименование данных | Варианты | |||||||||
| Постоянная вре-мени поперечной цепи ЭМУ, ТК, с | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.65 | 0.55 | 0.45 | 0.35 | 0.25 |
| Постоянная време-ни якорной цепи ЭМУ и Д, ТЭ, с | 0.05 | 0.08 | 0.05 | 0.08 | 0.03 | 0.06 | 0.09 | 0.1 | 0.15 | 0.1 |
| Электромеханичес-кая постоянная времени Д, ТМ, с | 0.02 | 0.25 | 0.15 | 0.3 | 0.2 | 0.3 | 0.25 | 0.15 | 0.18 | 0.15 |
| Постоянная време-ни обмотки управ-ления ЭМУ, ТУ, с | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 | 0.005 | 0.007 | 0.006 |
| Коэффициент пе-редачи сельсинов KC, в/рад | ||||||||||
| Коэффициент пе-редачи УПТ, KУ | ||||||||||
| Коэффициент пе-редачи ЭМУ, KЭ | ||||||||||
| Коэффициент пере-дачи Д, KД, рад/с/в | 1.5 | 2.5 | 1.5 | |||||||
| Коэффициент пе-редачи Р, KР | 0.05 | 0.025 | 0.1 | 0.012 | 0.08 | 0.008 | 0.01 | 0.01 | 0.01 | 0.01 |
| Коэффициент пе-редачи ФЧВ, KВ | 0.7 | 0.8 | 0.9 | 0.95 | 0.85 | 0.75 | 0.8 | 0.9 | 0.75 | 0.85 |
| Максимальная ско-рость Ωм, град/с | ||||||||||
| Максимальное ус-корение εм, град/с2 | ||||||||||
| Максимальная ошибка eд, угл.мин | ||||||||||
| Перерегулирование σ, % | ||||||||||
Время переходно-го процесса  , с , с
| 0.8 | 0.8 | 0.4 | 0.4 | 0.7 | 0.7 | 0.6 | 0.5 | 0.4 | 0.25 |
ле Д. Последний начнет вращаться вместе с Р и СП в том же направлении, что и СД. Как только выполнится равенство α=β двигатель Д и редуктор Р остановятся. Если угол β изменять постоянно, то он будет отслеживаться системой с определенной ошибкой δ. Очевидно, чем выше скорость и ускорение входного вала β, тем больше ошибка слежения.
|
|
|
|
|
|
