 |


Реализация регуляторов
|
|
|
|
Корректирующие устройства (регуляторы) можно реализовать как на пассивных четырехполюсниках, так и в виде активных фильтров. Последние функционально удобнее, т.к. построены на базе операционных усилителей, которые позволяют организовывать операции вычитания и сложения аналоговых сигналов. Кроме того в отличие от пассивных цепей активные фильтры обладают усилительными свойствами. На их основе легко реализовывать типовые промышленные законы управления (ПИ, ПИД и т.п.). И ещё одно достоинство – все регуляторы, построенные на основе операционных усилителей, можно соединять между собой непосредственно без специальных согласующих устройств и располагать на одной плате, которую обычно называют платой регуляторов.
В связи с этим в курсовой работе предлагается использовать активную коррекцию на базе операционных усилителей. Наиболее часто применяемые корректирующие фильтры представлены в табл. 8.1. На их основе можно реализовывать более сложные схемы путем их параллельного и последовательного соединения.
Рассмотрим методику реализации всех регуляторов, полученных в процессе коррекции следящей системы.
Передаточная функция РН была получена ранее в следующем виде:

Из данного выражения следует, что для реализации этого закона управления (ПИД-регулирование) необходимы усилитель, интегратор, дифференциатор и сумматор.
Наиболее часто используемые типовые активные фильтры представлены в табл. 8.1. На их основе (фильтры 1, 2, 3, 7) можно построить ПИД - регулятор в виде схемы, приведенной на рис. 8.1.
Для расчета параметров данной функциональной схемы используются следующие тривиальные соотношения:


|
|
|
Таблица 8.1
| № | Функциональная схема фильтра | Типовое название | Передаточная функция |

| Усилитель | 
| |
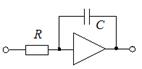
| Интегратор | 
| |

| Дифферен-циатор | 
|
Продолжение таблицы 8.1.

| ПИ - регулятор | 
| |
| 
| ||
| Фильтр низкой частоты | 
| |
| Сумматор | 
| |
| Реальный дифферен-циатор | 
|
Все эти соотношения имеют два неизвестных параметра, поэтому одним необходимо задаваться. При этом величины конденсаторов (ёмкостей) исходя из-за массо-габаритных ограничений не должны превышать 10 мкФ, а резисторы (сопротивления) желательно брать в диапазоне 102 – 106 Ом с использованием шкалы номинальных величин класса 1 (разброс ±5%), приведенной в табл. 8.2. Согласно этой шкале, например, с коэффициентом 1.3 изготавливаются резисторы 13 Ом, 130 Ом, 1.3 кОм, 13 кОм, 130 КОм,1.3 МОм.
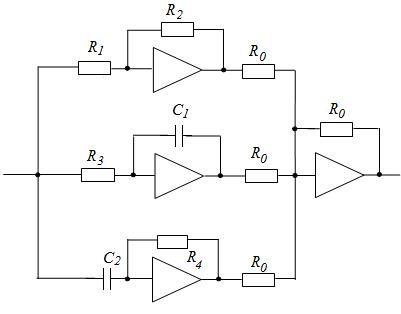
Рис. 8.1. Схема реализации ПИД – регулятора
Таблица 8.2
| 1.1 | 1.2 | 1.3 | 1.5 | 1.6 | 1.8 | 2.0 | 2.2 | 2.4 | 2.7 | 3.0 | |
| 3.3 | 3.6 | 3.9 | 4.3 | 4.7 | 5.1 | 5.6 | 6.2 | 6.8 | 7.5 | 8.2 | 9.1 |
Пусть сопротивления R 1, R 3 и R 4 равны соотношениям:
R 1= 3 кОм; R 3= 3.9 кОм; R 4= 560 кОм.
В результате получим
 кОм,
кОм,
 мкФ;
мкФ;
 мкФ.
мкФ.
В виду того, что операции усиления или деления на основе сумматора реализовывать не требуется, возьмем все сопротивления одинаковыми R 0=10 кОм.
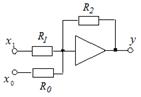
Аналогично реализуется регулятор скорости РС с ПИД – законом управления. Между выходом РС и входом РН следует установить дополнительный сумматор для реализации операции вычитания  (рис. 8.2), где
(рис. 8.2), где  - задающее напряжение, UН – напряжение обратной связи.
- задающее напряжение, UН – напряжение обратной связи.
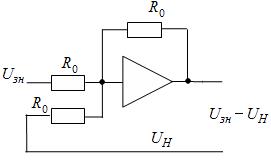
Рис. 8.2. Схема организации по напряжению обратной связи
На входе РС также необходимо установить сумматор для организации обратной связи (рис. 8.3).
Рис. 8.3. Схема реализации обратной связи по скорости
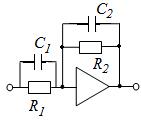
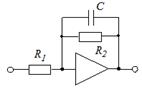
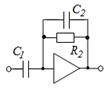
В качестве корректирующего фильтра основного контура регулирования можно взять из табл. 8.1. схему № 5 (рис. 8.4).

Рис. 8.4. Схема реализации регулятора положения
|
|
|
Её передаточная функция равна
 .
.
Используя полученную ранее ПФ
 ,
,
можно записать следующее соотношение для расчета параметров РП:
 ,
,  ,
,  .
.
Задаваясь сопротивлением R 6 = 51 кОм, получим
R 5 = R 6·234.29»1.2 МОм,
С 4= 0.32 / R 6 = 0.32/51000» 6.3 мФ,
С 5= 1.13/ R 5» 1.13/(1.2·10 6 )» 0.94 мкФ.
В заключение все регуляторы целесообразно объединить в одну схему – управляющее устройство (УУ) (рис. 8.5). Параметры этой схемы (сопротивления и емкости) следует перенумеровать по принятым в электронных схемах правилам: слева - направо, сверху – вниз, как это показано на рис. 8.5. Спецификация элементов УУ приводится в виде табл. 8.3. На этом этап реализации заканчивается.
Таблица 8.3
| Резисторы | Конденсаторы | ||
| Обозначение | Величина | Обозначение | Величина |
| R1 | 51 кОм | С1 | 6.3 мкФ |
| R2 | 1.2 МОм | С2 | 0.94 мкФ |
| … | … | … | … |
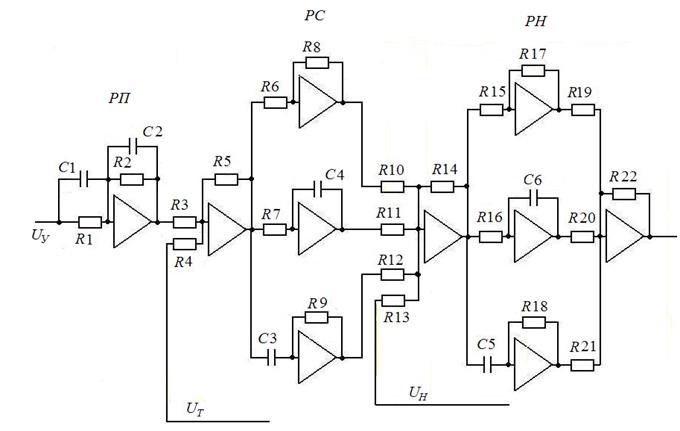
Рис. 8.5. Функциональная схема УУ следящей системы
|
|
|
