 |


Автоматизированные системы управления дорожным движением
|
|
|
|
Классификация и назначение
Управление движением в условиях предельного насыщения дорог транспортными и пешеходными потоками требует все более совершенных методов регулирования движения. В последнее время все большую актуальность приобретает применение автоматизированных систем управления дорожным движением (АСУДД), представляющих собой комплекс технических средств, реализующий определенные технологические алгоритмы управления транспортными потоками.
Основная цель введения АСУДД заключается в снижении суммарных задержек транспортных средств на пересечениях в зоне действия этой системы - на перекрестке, в районе или городе. Общие требования к АСУДД определены ГОСТ 24.501 - 82 «Автоматизированные системы управления дорожным движением. Общие требования».
Классификация АСУДД с разделением по методам управления приведена на рис. 5.3.

Рис. 5.3. Классификация АСУДД
(автоматизированной системы управления дорожным движением)















 Локальной является АСУДД, если для определения параметров регулирования на перекрестке используется только информация о транспортных потоках на подходах к этому перекрестку и в зоне перекрестка. С помощью локальных алгоритмов определяют цикл регулирования, последовательность фаз регулирования, их длительности или моменты переключения фаз, параметры промежуточных тактов.
Локальной является АСУДД, если для определения параметров регулирования на перекрестке используется только информация о транспортных потоках на подходах к этому перекрестку и в зоне перекрестка. С помощью локальных алгоритмов определяют цикл регулирования, последовательность фаз регулирования, их длительности или моменты переключения фаз, параметры промежуточных тактов.
Особенностью сетевых АСУДД является их использование для определения параметров регулирования информации о транспортной ситуации на нескольких перекрестках, обычно связанных в единую сеть, характеризующуюся значительной интенсивностью движения транспортных средств между соседними перекрестками и небольшими (до 600...700 м) расстояниями между ними.
|
|
|
Как правило, на сетевом уровне определяются циклы регулирования для группы перекрестков и временные сдвиги для отдельных светофорных объектов. Для определения этих параметров помимо данных, необходимых для локального управления, используется информация о топологии сети, взаимосвязях транспортных потоков на соседних стоп-линиях и (или) геометрических направлениях проезда через перекрестки, временах проезда между соседними стоп-линиями.
По временному критерию все алгоритмы светофорного регулирования подразделяют на алгоритмы, реализующие управление дорожным движением по прогнозу (программные, жесткие), и алгоритмы, действующие в реальном времени (адаптивные).
Управление по прогнозу не исключает достаточно частого (до 3 - 5 раз в суточном цикле) изменения параметров регулирования, однако эти параметры определяются не исходя из текущей транспортной ситуации, а ее прогнозированием, основанным на выполненных ранее наблюдениях.
Промежуточное положение между адаптивными и неадаптивными алгоритмами занимают алгоритмы, основанные на ситуационном управлении. Алгоритмы этой группы предполагают предварительный расчет параметров регулирования для различных классов транспортных ситуаций и создание библиотеки типовых режимов регулирования. Выбор конкретного режима из библиотеки производится в реальном времени на основании текущей информации о транспортной ситуации и отнесении ее к одному из классов транспортных ситуаций.
Таким образом, методы автоматизированного управления транспортными потоками в АСУДД можно отнести к одному из четырех классов, как это показано на рис. 5.4 (для каждого класса указаны наиболее распространенные алгоритмы управления).
В настоящее время в России наиболее распространенным является метод локального жесткого однопрограммного управления светофорной сигнализацией.
|
|
|
Данный метод основан на предварительном расчете длительности цикла регулирования и фаз регулирования.
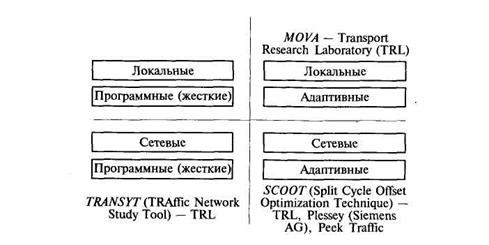
Рис. 5.4. Методы автоматизированного управления
|
|
|
