 |


д) Пуск в ход синхронного двигателя.
|
|
|
|
Синхронные двигатели долгое время находили себе применение лишь в редких случаях вследствие тех затруднений, которые создавались при пуске их в ход.
Электромагнитный вращающий момент М эм будет все время направлен в одну сторону только при синхронной частоте вращения ротора. Если же двигатель подключить к сети переменного тока, когда его ротор неподвижен, а в обмотке возбуждения имеется постоянный ток, то электромагнитный момент, получающийся от взаимодействия неподвижного поля полюсов и перемещающихся с синхронной частотой по окружности статора токов, будет в течение периода дважды изменять свое направление (над северным, например, полюсом ротора будут иметь место токи то одного направления, то, спустя полпериода, другого направления). Двигатель не придет во вращение, так как электромагнитный момент не сможет в течение полпериода разогнать ротор до синхронной частоты из-за его инерции.
Следовательно, для того чтобы электромагнитный вращающий момент в синхронном двигателе был направлен все время в одну сторону, необходимо до подключения синхронного двигателя к сети раскрутить его каким-нибудь посторонним двигателем до синхронной частоты вращения. После этого включение рубильника или масляного выключателя должно быть произведено в определенный момент времени, который устанавливается при помощи синхроноскопа. Способы включения здесь те же, что и для генератора.
Пуск синхронного двигателя при помощи постороннего двигателя, называемого разгонным или пусковым, обладает рядом крупных недостатков, которые и препятствовали широкому распространению синхронных двигателей.
При помощи разгонного двигателя, мощность которого обычно составляла 5  15% от номинальной мощности синхронного двигателя, последний можно было пускать только при малой нагрузке на валу. Установка к тому же получалась громоздкой и неэкономичной.
15% от номинальной мощности синхронного двигателя, последний можно было пускать только при малой нагрузке на валу. Установка к тому же получалась громоздкой и неэкономичной.
|
|
|
В качестве разгонного двигателя обычно использовался асинхронный двигатель с числом полюсов на два меньшим, чем число полюсов синхронного двигателя.
В настоящее время пуск в ход при помощи разгонного двигателя на практике почти не применяется; он иногда находит себе применение главным образом для мощных синхронных компенсаторов (см. § 4-8, ж).
В последние годы почти во всех случаях практики применяется так называемый асинхронный пуск в ход. Синхронный двигатель при этом пускается как асинхронный. Его ротор должен быть снабжен специальной пусковой обмоткой, выполняемой так же, как продольно-поперечная успокоительная обмотка (рис. 4-46). Она мало отличается от короткозамкнутой обмотки ротора асинхронного двигателя. Стержни пусковой обмотки закладываются в пазы полюсных наконечников и соединяются на торцах пластинами, образующими короткозамыкающие кольца (рис. 4-81). Вместо пусковой клетки иногда используются массивные полюсные наконечники, которые на торцах также должны быть соединены пластинами.

Рис. 4-81. Ротор синхронного двигателя с пусковой (успокоительной) обмоткой
Принципиальная схема асинхронного пуска в ход синхронного двигателя приведена на рис. 4-82.
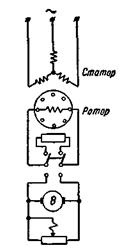
Рис. 4-82. Схема синхронного двигателя (при асинхронном пуске в ходе).
После включения двигателя в нем образуется вращающееся поле. Взаимодействие его с токами, наведенными в пусковой клетке, создает вращающий момент, так же как в короткозамкнутом асинхронном двигателе.
Обмотка возбуждения при этом должна быть замкнута, так как в противном случае в ней наводилась бы вращающимся полем большая э.д.с., опасная не только для изоляции обмотки, но и для обслуживающего персонала. Ее замыкают для увеличения пускового момента на сопротивление, приблизительно в 8 12 раз большее сопротивления самой обмотки возбуждения (переключатель на рис. 4-82 должен быть включен вверх). (При отсутствии пусковой клетки и при замкнутой накоротко обмотке возбуждения наблюдается "явление одноосного включения" (см. § 3-21, д).)
|
|
|
Синхронный двигатель, вращаясь как асинхронный, доходит почти до синхронной частоты. Получающееся при этом скольжение зависит от нагрузки на валу и от параметров электрических цепей ротора. Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения под действием возникающего при этом синхронизирующего момента (переключатель на рис. 4-82 должен быть включен вниз).
При асинхронном пуске в ход синхронных двигателей они обычно непосредственно подключаются к сети, если мощность сети достаточно велика и для нее допустимы большие пусковые токи, которые достигают в начале пуска 5¸6-кратных значений по сравнению с номинальными. Если же необходимо уменьшить пусковые токи, то пуск производится при пониженном напряжении, так же как мощных асинхронных короткозамкнутых двигателей.
Здесь также применяется пуск при переключении обмотки статора со звезды на треугольник, что дает уменьшение фазного напряжения при пуске в  раз, а линейного тока — примерно в 3 раза. Чаше для понижения напряжения при пуске используется автотрансформатор или реактор (реактивная катушка). Соответствующие принципиальные схемы пуска представлены на рис 4-83.
раз, а линейного тока — примерно в 3 раза. Чаше для понижения напряжения при пуске используется автотрансформатор или реактор (реактивная катушка). Соответствующие принципиальные схемы пуска представлены на рис 4-83.
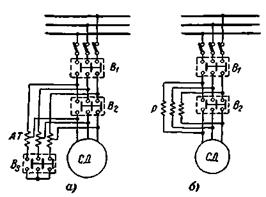
Рис. 4-83. Схема пуска синхронного двигателя при пониженном напряжении.
а — автотрансформаторный пуск; б — реакторный пуск.
Автотрансформаторный пуск производится по схеме рис. 4-83, а, причем порядок пусковых операций следующий: замыкается выключатель В 3, соединяющий обмотки автотрансформатора AT в звезду; затем замыкается выключатель В 1; по достижении двигателем некоторой определенной частоты вращения выключатель В 3 размыкается и автотрансформатор превращается в реактивную катушку; наконец, замыкается выключатель В 2, и двигатель получает полное напряжение, после чего включается постоянный ток в обмотку возбуждения и двигатель входит в синхронизм.
|
|
|
Реакторный пуск производится по схеме рис. 4-83, б. Порядок пусковых операций в этом случае следующий: на первой стадии пуска замыкается выключатель В 1; затем по достижении определенной частоты вращения замыкается выключатель В 2 и к двигателю подается полное напряжение; после этого включается постоянный ток в обмотку возбуждения и двигатель входит в синхронизм.
Автотрансформаторный пуск является трехступенчатым пуском. На первой ступени к двигателю подводится напряжение U 2, равное 40 60% номинального напряжения U н; на второй ступени, когда автотрансформатор используется как реактор, к двигателю подводится напряжение, составляющее 70 80% номинального. Пусковые токи, получаемые из сети в начале пуска, здесь уменьшаются, как показано ниже, пропорционально квадрату напряжения.
Начальный пусковой ток в обмотке статора уменьшается пропорционально напряжению. Если при полном напряжении U н на обмотке статора начальный пусковой ток равен I нач, то при напряжении U 2 он равен  . Ток из сети I с — ток первичной обмотки автотрансформатора, имеющего коэффициент трансформации
. Ток из сети I с — ток первичной обмотки автотрансформатора, имеющего коэффициент трансформации  ; следовательно,
; следовательно,  , т. е. ток сети пропорционален квадрату напряжения, так же как начальный вращающий момент, развиваемый двигателем.
, т. е. ток сети пропорционален квадрату напряжения, так же как начальный вращающий момент, развиваемый двигателем.
При реакторном пуске ток сети I с, поступающий в двигатель в начале пуска, пропорционален напряжению, тогда как начальный вращающий момент пропорционален квадрату напряжения. В этом — недостаток реакторного пуска по сравнению с автотрансформаторным. Однако к его преимуществам нужно отнести большую простоту схемы, меньшее количество необходимой аппаратуры. Поэтому при питании двигателей от достаточно мощных подстанций, когда допустимы большие пусковые токи, следует предпочесть более простой и дешевый реакторный пуск.
е) Рабочие характеристики синхронного двигателя.
На рис. 4-84 представлены рабочие характеристики синхронного двигателя, полученные при постоянных напряжении и частоте сети и при постоянном возбуждении. По оси абсцисс здесь отложена полезная мощность Р 2 (мощность на валу).
|
|
|

Рис. 4-84. Рабочие характеристики синхронного двигателя.
Если при холостом ходе установлен соs φ = 1, то при увеличении нагрузки он будет уменьшаться, что должно быть ясно из рассмотрения V -образных кривых двигателя (рис. 4-80) и их построения (рис. 4-79).
Подведенная мощность P 1, больше мощности на валу Р 2 на величину потерь в двигателе ∑ P. Коэффициент полезного действия  в зависимости от Р 2 изображается кривой, обычной для электрических машин.
в зависимости от Р 2 изображается кривой, обычной для электрических машин.
На рис. 4-85 изображены кривые, показывающие, как изменяется cos φ с нагрузкой при различных значениях возбуждения. Кривая 1 аналогична кривой cos φ на рис. 4-84. Кривая 2 относится к случаю, когда cos φ установлен равным единице при номинальной нагрузке. Эта кривая показывает, что cos φ при уменьшении нагрузки также уменьшается, но он будет соответствовать опережающему току, потребляемому двигателем из сети. Кривая 3 соответствует току возбуждения, который дает cos φ = l при Р 2 = 0,5 Р 2н.

Рис. 4-85. Зависимость cos φ от нагрузки при различных возбуждениях.
Двигатели обычно рассчитываются для работы при номинальной нагрузке с cos φ = 0.9, соответствующим опережающему току. В этом случае машина будет служить не только в качестве двигателя, но и для улучшения cos φ всей электрической установки.
Применение нормальных синхронных двигателей только для улучшения cos φ (для работы в режиме компенсатора) в обычных случаях нецелесообразно, так как при такой работе и при допустимом (номинальном) токе возбуждения ток статора получается меньше номинального и, следовательно, машина не полностью используется.
Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях.
Основное преимущества синхронного двигателя, как уже отмечалось, его высокий cosφ. Это преимущество приводит не только к повышению использования всей электрической установки, но и к уменьшению размеров синхронного двигателя по сравнению с асинхронным (при прочих равных условиях). Последнее объясняется тем, что размеры электрической машины определяются ее кажущейся мощностью, a не активной. Кажущаяся мощность синхронного двигателя при созφ = 1 меньше, чем асинхронного, в отношении 1: cos φ. Это особенно заметно при сравнении тихоходных двигателей, так как cos φа тихоходного асинхронного двигателя имеет относительно небольшое значение.
|
|
|
Из других важных преимуществ синхронного двигателя отметим здесь возможность получить большой максимальный момент М эм.м за счет увеличения воздушного зазора, так как при этом уменьшается синхронное сопротивление xd. Увеличение максимального вращающего момента асинхронного двигателя за счет увеличения воздушного зазора привело бы к значительному ухудшению его cos φ. К тому же максимальный вращающий момент синхронного двигателя зависит от напряжения в первой степени, тогда как тот же момент асинхронного двигателя пропорционален квадрату напряжения.
ж) Синхронный компенсатор.
Как указывалось, синхронный компенсатор представляет собой синхронный двигатель, работающий без нагрузки на валу и предназначенный для компенсации сдвига фаз тока и напряжения или для регулирования напряжения в конце и в промежуточных точках линии электропередачи. Последнее достигается путем регулирования тока возбуждения синхронного компенсатора, что приводит к изменению реактивной составляющей тока линии электропередачи. Обычно синхронный компенсатор работает с перевозбуждением, потребляя из сети опережающий ток, как конденсатор. Поэтому его иногда называют синхронным конденсатором.
Пуск в ход синхронного компенсатора осуществляется при помощи разгонного двигателя, причем включение его в сеть на подстанциях Советского Союза довольно часто производится по методу самосинхронизации. В последние годы широко применяется также асинхронный пуск в ход при пониженном напряжении.
Заводами Советского Союза изготавливаются синхронные компенсаторы мощностью от 1000 до 75000 кВА.
Их номинальная мощность соответствует режиму работы с опережающим напряжение током (практически на 90°). Ток возбуждения при этом режиме работы является номинальным током возбуждения. Для его уменьшения синхронные компенсаторы обычно выполняются с меньшим воздушным зазором, чем синхронные двигатели. Вследствие этого их синхронное сопротивление по продольной оси x d* [д. е.] нередко достигает значений 2 2,2.
4-9. Распределение активной и реактивной мощностей между параллельно работающими машинами
На основании изложенного в предыдущих параграфах можно сделать следующие выводы, касающиеся распределения активных и реактивных мощностей при параллельной работе синхронных машин в генераторном и двигательном режимах.
Общая нагрузка параллельно работающих синхронных генераторов вполне определяется двумя векторами: вектором напряжения  и вектором тока
и вектором тока  . Если даны эти два вектора, то мы можем найти активную и реактивную мощности, составляющие нагрузку.
. Если даны эти два вектора, то мы можем найти активную и реактивную мощности, составляющие нагрузку.
Распределение активной мощности между параллельно работающими синхронными генераторами производится путем воздействия на регуляторы частоты вращения их первичных двигателей. Воздействие на регуляторы скорости вызывает изменение количества пара, воды или горючего, поступающего в первичный двигатель. При этом будет изменяться вращающий момент, развиваемый первичным двигателем, а следовательно, и угол θ между векторами и  , что, как известно, вызывает изменение активной мощности синхронной машины.
, что, как известно, вызывает изменение активной мощности синхронной машины.
На электрических станциях применяются автоматические регуляторы частоты вращения первичных двигателей. Для того чтобы распределение нагрузки между параллельно работающими генераторами соответствовало их номинальным мощностям, нужно правильно подобрать характеристики [ п = f (P)] автоматических регуляторов.
Распределение реактивной мощности между параллельно работающими синхронными машинами производится путем воздействия на возбуждение этих машин.
Синхронный генератор при перевозбуждении отдает в сеть отстающий реактивный ток, а при недовозбуждении отдает опережающий реактивный ток. В генераторе фаза тока определяется относительно напряжения, действующего на зажимах обмотки статора.
Синхронный двигатель при перевозбуждении потребляет опережающий реактивный ток, а при недовозбуждении потребляет отстающий реактивный ток. Здесь фаза тока определяется относительно напряжения сети, которое принимается направленным прямо противоположно напряжению на зажимах машины в режиме генератора. Так как потребление отстающего реактивного тока эквивалентно отдаче в сеть опережающего тока и наоборот, то можно считать, что перевозбужденная синхронная машина независимо от того, работает ли она генератором или двигателем, отдает в сеть отстающую реактивную мощность, а недовозбужденная синхронная машина — генератор или двигатель — потребляет из сети отстающую реактивную мощность. Перевозбужденная синхронная машина может поэтому рассматриваться как емкость, а недовозбужденная синхронная машина — как индуктивность, включенная в сеть.
Понятия «перевозбуждение» и «недовозбуждение» синхронных машин вполне определяют их работу в отношении фазы реактивного тока.
На современных электрических станциях синхронные машины снабжаются автоматическими быстродействующими регуляторами напряжения, которые в то же время обусловливают автоматическое распределение реактивной мощности между машинами.
4-10. Реактивная машина
Как указывалось, реактивной машиной называется явнополюсная синхронная машина, работающая без возбуждения постоянным током (при Е 0 = 0). В такой машине электромагнитный вращающий момент получается из-за различия xd и xq [см. (4-77)].
Можно представить себе, что этот момент, называемый реактивным или «моментом явнополюсности», создается вследствие намагничивания ротора вращающимся магнитным полем и стремления полюсов ротора ориентироваться относительно поля так, чтобы магнитные сопротивления для его индукционных трубок были наименьшими.
Можно также объяснить возникновение реактивного момента в явнополюсной машине, исходя из закона электромагнитных сил. Для этого обратимся к рис. 4-86 и будем считать, что ротор вращается с синхронной частотой, т. е. с такой же частотой, как и н.с. Fа статора.
 Рис. 4-86. К объяснению возникновения реактивного момента в явнополюсной машине (режим двигателя).
Рис. 4-86. К объяснению возникновения реактивного момента в явнополюсной машине (режим двигателя).
Примем распределение н.с. Fa статора по его окружности синусоидальным, так же как и статорных токов i, создающих ее. Электромагнитный момент в данном случае может возникнуть только в результате взаимодействия первой гармоники поля с токами статора, так как значения моментов от взаимодействия высших гармоник поля с токами статора (синусоидально распределенными) равны нулю. Чтобы найти первую гармонику поля машины, заменим Fa ее продольной Fd и поперечной Fq составляющими (рис. 4-86, а).
На рис. 4-86, б показаны кривые: продольного Bd и поперечного Bq полей, их первых гармоник Bd 1 и Bq l и первой гармоники B 1 результирующего поля; здесь же снова показана кривая распределения токов i статора. На рисунке мы видим, что кривая токов i и кривая поля B 1 сдвинуты между собой на угол, больший 90°; поэтому среднее значение электромагнитных сил, действующих на статор, не равно нулю (см § 3-13, а; рис 3-42). Следовательно, возникает электромагнитный момент М р, действующий на статор, и точно такой же момент М р, действующий на ротор, но в противоположную сторону. Этот момент и есть реактивный момент.
Если бы мы имели равномерный воздушный зазор, то кривая поля машины совпадала бы с кривой Fa и сдвиг между нею и кривой токов i был бы равен 90° (рис. 4-86, а). При таком сдвиге среднее значение тангенциальных электромагнитных сил было бы равно нулю, а следовательно, и электромагнитный момент был бы равен нулю. В машине с равномерным воздушным зазором электромагнитный момент при синхронной частоте вращения может получиться только при возбуждении машины постоянным током, так как только в этом случае получается сдвиг между кривыми поля и токов статора, отличающийся от 90°.
Реактивная машина получает намагничивающий ток от другой (или других) синхронной машины, параллельно с которой она должна работать. Очевидно, что этот ток является отстающим по отношению к напряжению сети, так же как и в случае недовозбужденной синхронной машины.
Векторную диаграмму реактивной машины можно получить из соответствующей диаграммы явнополюсной машины, положив в ней E 0 = 0. На рис. 4-87 приведены диаграммы реактивной машины: а) для генератора; б) для двигателя.

Рис. 4-87. Векторные диаграммы реактивной машины.
a — генератора, б — двигателя.
Уравнение для электромагнитной мощности явнополюсной машины (4-75) в случае реактивной машины (E 0 = 0) принимает следующий вид:
 . (4-85)
. (4-85)
Оно может быть также получено непосредственно из диаграмм на рис. 4-87, если принять активное падение напряжения равным нулю. Для режима двигателя угол θ в (4-85) нужно считать отрицательным.
Максимум Р эм будем иметь при sin 2θ = 1, т. е. при θ = 45°. Следовательно, максимальное значение электромагнитной мощности реактивной машины
 . (4-86)
. (4-86)
P эм.м будет тем больше, чем меньшее xq по сравнению с xd. Для нормальных синхронных машин обычно  . Подставляя это значение в уравнение для P эм.м, получим максимальную мощность нормальной явнополюсной синхронной машины при отсутствии возбуждения и при U н:
. Подставляя это значение в уравнение для P эм.м, получим максимальную мощность нормальной явнополюсной синхронной машины при отсутствии возбуждения и при U н:
 , (4-87)
, (4-87)
где  — установившийся ток короткого замыкания при возбуждении, соответствующем номинальному напряжению при холостом ходе.
— установившийся ток короткого замыкания при возбуждении, соответствующем номинальному напряжению при холостом ходе.
Так как ток I к0 обычно не превышает номинального I н, то, следовательно, максимальный реактивный момент нормальной явнополюсной машины не превышает 25% номинального момента (в крупных гидрогенераторах, где  снижается до 0,6 0,7, М р.м может составлять до 35 40% от М н).
снижается до 0,6 0,7, М р.м может составлять до 35 40% от М н).
Реактивный генератор на практике распространения не получил. Бывают случаи, когда явнополюсный генератор в результате обрыва цепи возбуждения работает как реактивный генератор, потребляя при этом большой реактивный (намагничивающий) ток. Но эти случаи должны быть отнесены к аварийным.
Турбогенератор как реактивный генератор может развивать лишь очень небольшую мощность, так как в нем  . Наблюдавшиеся на практике случаи, когда турбогенераторы отдавали активную мощность при отсутствии возбуждения, соответствовали работе этих машин в качестве асинхронных генераторов. Такая работа для турбогенераторов может быть допущена в течение непродолжительного времени при небольшой нагрузке, так как их скольжение, а следовательно, и потери в роторе при этом относительно невелики. Здесь роль короткозамкнутой обмотки ротора выполняют контуры вихревых токов и контуры, образованные металлическими клиньями в пазах ротора.
. Наблюдавшиеся на практике случаи, когда турбогенераторы отдавали активную мощность при отсутствии возбуждения, соответствовали работе этих машин в качестве асинхронных генераторов. Такая работа для турбогенераторов может быть допущена в течение непродолжительного времени при небольшой нагрузке, так как их скольжение, а следовательно, и потери в роторе при этом относительно невелики. Здесь роль короткозамкнутой обмотки ротора выполняют контуры вихревых токов и контуры, образованные металлическими клиньями в пазах ротора.
На практике получили распространение лишь реактивные двигатели. В таких двигателях явнополюсный ротор не имеет обмотки возбуждения, причем он выполняется таким образом, что  . В этом случае согласно (4-85)
. В этом случае согласно (4-85)
 . (4-88)
. (4-88)
Очевидно, что cos φ реактивных двигателей невысок, и это является одним из основных их недостатков.
Реактивные двигатели небольшой мощности (от нескольких Вт до нескольких сотен Вт) в последние годы получили большое распространение (схемы сигнализации, телемеханики, синхронной связи, звуковое кино, часы и пр.). Ценность их заключается в том, что они при сравнительно простой конструкции требуют для питания только переменный ток и вращаются при этом с частотой, строго соответствующей частоте питающего тока.
Наряду с трехфазными применяются также однофазные реактивные двигатели. Пуск в ход тех и других производится так же, как соответствующих асинхронных короткозамкнутых двигателей. Поэтому роторы их снабжаются пусковой клеткой.
4-11. Внезапное короткое замыкание синхронной машины
В синхронной машине, так же как и в любой другой электрической машине, при переходе от одного установившегося режима работы к другому возникает ряд явлений, изучение которых имеет важное значение, так как на практике с ними часто приходится иметь дело. Эти явления переходного процесса возникают вследствие изменения энергии магнитных полей машины, а также вследствие изменения кинетической энергии ее вращающихся частей.
Изменение кинетической энергии вызывается нарушением равновесия вращающих моментов, действующих на ротор машины. Возникающие при этом переходные процессы, если машина работает параллельно с другими синхронными машинами, характеризуются колебаниями частоты вращения около синхронной. Эти колебания («качания») синхронной машины будут рассмотрены в следующем § 4-12.
Мы здесь рассмотрим главным образом переходные процессы, которые обусловлены изменением энергии магнитных полей. Они возникают при всяком нарушении режима работы синхронной машины и особенно резко проявляются при внезапном коротком замыкании обмотки статора. В этом случае в обмотках статора и ротора возникают очень большие токи, во много раз превышающие их номинальные значения. Такие токи опасны не только для самой машины, но и для аппаратуры и других элементов распределительных устройств электрических станций и подстанций, с которыми она связана. В машине они создают значительные механические силы, особенно опасные для лобовых частей обмоток статора. Кроме того, создаются большие вращающие моменты, действующие на ротор и статор, которые также необходимо иметь в виду при конструировании машины.
Точное исследование процессов, возникающих в синхронной машине при ее внезапном коротком замыкании, весьма сложно. Поэтому приходится ограничиваться приближенным исследованием, основанным на ряде допущений.
Мы здесь рассмотрим эти процессы только с физической стороны и напишем некоторые соотношения, характеризующие их.
Рассмотрим сначала трехфазное короткое замыкание и примем, что частота вращения при этом остается неизменной. Будем считать, что активные сопротивления всех контуров машины равны нулю. Тогда согласно закону Ленца, который в этом случае называют «законом постоянства потокосцеплений», потокосцепления контуров должны остаться неизменными.
Пусть короткое замыкание произошло при холостом ходе машины, когда ось рассматриваемой фазы статора совпадала с осью полюсов, когда, следовательно, ее потокосцепление было наибольшим. При повороте ротора поток полюсов, сцепляющийся с этой фазой, будет уменьшаться и сделается равным нулю, когда ротор повернется на 90 эл. град. В фазе возникнет ток, стремящийся поддержать прежнее значение потокосцепления. При дальнейшем повороте ротора на 90 эл. град ток в фазе статора еще больше увеличивается, так как он должен не только создать прежнее потокосцепление, но и противодействовать н.с. обмотки возбуждения. Когда ротор снова повернется на 180 эл. град, т. е. займет исходное положение, то ток фазы будет равен нулю.
Мы можем считать, что ток в фазе будет иметь две составляющие: периодическую и апериодическую. Периодические токи фаз статора создадут вращающуюся н.с., неподвижную относительно полюсов. Ее ось совпадает с осью полюсов, так как эти токи можно рассматривать как чисто реактивные. Апериодические токи фаз статора создают поле, неподвижное относительно статора (неподвижное в пространстве).
Можно провести аналогию с трансформатором и принять при этом, что короткое замыкание обмотки статора аналогично включению короткозамкнутого трансформатора на синусоидальное напряжение (э.д.с. обмотки статора соответствует напряжению, приложенному к трансформатору).
Наибольшее значение тока в фазе статора получается по аналогии с трансформатором в том случае, если наведенная в ней э.д.с. в момент короткого замыкания была равна нулю. Оно получается, спустя полпериода после короткого замыкания, и принимается равным:

или

 . (4-89)
. (4-89)
Это наибольшее возможное значение тока при трехфазном коротком замыкании называется ударным током короткого замыкания. В (4-89) взят коэффициент 1,8 вместо 2, чтобы учесть затухание апериодической составляющей тока короткого замыкания. Принимается, что короткое замыкание произошло при
 .
.
Индуктивные сопротивления по продольной оси  называются соответственно переходным и сверхпереходным. Первое из них
называются соответственно переходным и сверхпереходным. Первое из них  нужно брать для машин, не имеющих успокоительной обмотки на роторе (соответствует индуктивному сопротивлению короткого замыкания двухобмоточного трансформатора), второе
нужно брать для машин, не имеющих успокоительной обмотки на роторе (соответствует индуктивному сопротивлению короткого замыкания двухобмоточного трансформатора), второе  — для машин с успокоительной обмоткой на роторе (соответствует индуктивному сопротивлению трехобмоточного трансформатора при замкнутых накоротко обеих вторичных обмотках). Обычные значения для переходного и сверхпереходного индуктивных сопротивлений по продольной оси:
— для машин с успокоительной обмоткой на роторе (соответствует индуктивному сопротивлению трехобмоточного трансформатора при замкнутых накоротко обеих вторичных обмотках). Обычные значения для переходного и сверхпереходного индуктивных сопротивлений по продольной оси:  = 0,15 0,4;
= 0,15 0,4;  = 0,11 0,20.
= 0,11 0,20.
Токи в обмотках машины при неустановившемся процессе короткого замыкания затухают, чему соответствует уменьшение энергии магнитных полей, сцепляющихся с обмотками, так как в действительности активные сопротивления обмоток не равны нулю. На рис. 4-88 приведены осциллограммы токов обмоток при трехфазном коротком замыкании. Мы видим, что вначале ток статора быстро затухает в соответствии главным образом с затуханием апериодической составляющей тока в успокоительной обмотке. Этот процесс быстрого затухания тока принято называть сверхпереходным. Далее мы имеем переходный процесс до установившегося режима короткого замыкания. Здесь амплитуда переходного тока затухает в соответствии (в основном) с затуханием апериодической составляющей тока в обмотке возбуждения. Апериодическая.составляющая тока статора затухает довольно быстро; в соответствии с ней затухают переменные токи в успокоительной обмотке и в обмотке возбуждения.

Рис. 4-88. Осциллограммы токов при трехфазном коротком замыкании.
а — тока фазы статора i 1 (при е 0 = 0 в момент замыкания); б —тока в обмотке возбуждения i в; в —тока в успокоительной обмотке i у.
Ударный ток короткого замыкания создает очень большие электромагнитные (механические) силы, действующие на лобовые части обмотки статора; поэтому они должны быть надежно укреплены. Особенно это важно для больших машин с малым числом полюсов (турбогенераторы), имеющих относительно длинные лобовые части. Они здесь укрепляются при помощи бандажных колец K, охватывающих лобовые части и укрепленных в свою очередь при помощи кронштейна В (рис. 4-89).
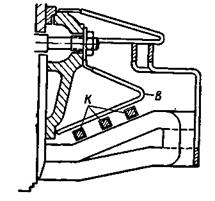
Рис. 4-89. Крепления лобовых частей статорной обмотки турбогенератора.
Каждая катушка обмотки привязывается прочным шнуром к бандажным кольцам и, кроме того, между катушечными сторонами укрепляются дистанционные прокладки из изоляционного материала, чтобы предотвратить тангенциальные смешения катушечных сторон, особенно в местах их выхода из пазов.
Как отмечалось, создаются также очень большие моменты, действующие на статор и ротор. Их мгновенные значения особенно велики при двухфазном коротком замыкании. В этом случае они достигают примерно 10-кратного значения по сравнению с номинальным моментом. На такие моменты должны быть рассчитаны, например, болты, укрепляющие машину на фундаменте. Что касается вала и муфты, соединяющей синхронную машину с первичным двигателем, или с возбудителем, или с каким-либо рабочим механизмом, то момент М в, действующий на них, будет зависеть от соотношения между маховым моментом (GD 2)с ротора синхронной машины и внешним маховым моментом (GD 2)вн:
 ,
,
где M к — наибольшее мгновенное значите электромагнитного момента при двухфазном коротком замыкании.
4-12. Качания синхронной машины
Как было установлено, при всяком изменении нагрузки изменяется угол и между векторами напряжения и э.д.с. , так как каждой нагрузке соответствует свой угол q. Если машины работают параллельно, то при переходе любой из машин от одной нагрузки к другой угол в обычно устанавливается не сразу, а после нескольких колебаний около конечного своего значения.
Допустим, что генератор работает с сетью очень большой мощности и что момент, приложенный к его валу со стороны первичного двигателя, резко возрос от значения М 1, до значения М 2 и в дальнейшем остался неизменным. Угловая частота вращения ротора ω, а следовательно, и угол θ начнут при этом возрастать. При изменении ω и θ возникнут момент сил инерции и синхронизирующий момент, которые, как будет показано, действуют в противоположные стороны. Вследствие этого процесс изменения угла θ от установившегося значения θ1, соответствующего моменту М 1, до установившегося значения θ2, соответствующего моменту М 2, носит колебательный характер, причем обычно колебания быстро затухают (рис 4-90).
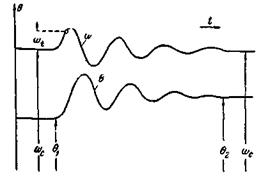
Рис. 4-90. Колебания угла θ и частоты ω при резком изменении нагрузки синхронной машины.
Частоту вращения машины ω мы можем представить как сумму двух частот вращения — постоянной синхронной ωс и переменной ω t: ω = ωс + ω t.
Рассмотренные колебания называются собственными или свободными Следовательно, синхронная машина вместе с другими машинами, работающими с ней параллельно, представляет собой систему, способную к собственным колебаниям, что является наряду с указанными ранее характерным свойством синхронной машины.
Помимо собственных колебаний синхронная машина может испытывать также вынужденные колебания, если внешний момент, приложенный к ее валу, периодически изменяется. Такие условия для синхронного генератора получаются, если первичным двигателем служит поршневая машина (паровая машина или двигатель внутреннего сгорания). Для синхронного двигателя те же условия возникают при нагрузке его, например, на поршневой насос или компрессор.
Периодически изменяющийся момент на валу синхронной машины нарушает нормальные условия ее работы, а в некоторых случаях может сделать эту работу невозможной.
В последующем мы будем рассматривать качания синхронной машины применительно к синхронному генератору, однако полученные при этом выводы могут быть отнесены в равной мере и к качаниям синхронного двигателя.
а) Вращающие моменты, действующие на ротор синхронной машины при ее качаниях.
Вначале рассмотрим параллельную работу синхронного генератора с сетью бесконечно большой мощности при периодически изменяющемся моменте на его валу.
Предположим, что генератор приводится во вращение каким-нибудь поршневым двигателем, например одноцилиндровым четырехтактным дизелем. Кривая зависимости вращающего момента такого двигателя от угла поворота в геометрических (механических) градусах показана на рис 4-
|
|
|
