 |


Адаптивный регулятор тока ЭПУ(БТУ,ЭТУ)
|
|
|
|
В основе данного устройства идея что сигнал имеет 2 составляющие:
U/y – обеспечивает ЭДС преобразователя = ЭДС двигателя
ΔUy – обеспечивает ЭДС преобразователя = падению напряжения якорной цепи.
U/y 
ΔUy 

С учетом этого может быть реализован следующий принцип построения системы:
- на выходе регулятора тока формируется только составляющая сигнала управления пропорциональная падению напряжения. А составляющая определяющая ЭДС ЭД вводится на вход СИФУ от отдельного источника
U/y =(Uопмакс/π)*arcsin Ed\Ed0

28. Наладка контура тока
Процесс наладки рассмотрим на промежутке адаптивного регулятора тока КТЭ (см. предыдущую схему КТЭ, Перельмутер)
Процесс наладки следует начинать с оптимизации без применения устройств адаптации. Для этого в регул. соед. клему 7 с клемой 8 (см. схему) Т.е. подается положительное напряжение на затворы транзистора.
Кроме этого отпаивается R21 или R22.
Для большинства ЭП зона --- тока 20-30% от I ном. Для названных выше условий проводим настройку контура в режиме непрерывного тока. Параметры предварительной настройки выбираем из следующих соображений:


После установки расчитанных значений C5, R17, R2 и R3 проверяют работу контура тока в режиме непрерывного тока. При этом на вход контура тока подают сигнал состоящий из постоянной составляющей полож. прямоуг. импульсы. Так, чтобы изменение выходного сигнала происх. от I ном до 1/2 I ном ( Imin до Imax ), что соответствует работе контура тока в непрерывном режиме.

При этом ЭД остаётся неподвижным. Не рекомендуется держать затормож. ЭД более 20м.
Корректировка параметров контура производится по виду переходного процесса на выходе датчика тока при скачкообразном изменении входного сигнала. При постоянной времени рег. тока ТРТ меньше Тя переходной процесс будет затянут.
|
|
|
Если Трт = Тя переходной процесс имеет форму экспоненты.
Если Трт > Тя то будет наблюдаться перерегулирование в конце переходного процесса.
При настройке в начале добиваются совпадения постоянных времени, а затем уменьшением сопротивление R3 добиваются требуемой величины перерегулирования. Если настройку осуществлять с учетом условий адаптации:
Устанавливают на место перемычку. В целом процесс настройки аналогичен описаному выше. Но необходимо выставить порог срабатывания ключей (изменении амплитуды R35)
Амплитуда котор. должна соответствовать Uзт=0 (I гр.непр.преоб)
Для настройки контура с учетом самонастройки модели производят отключение релейной части, но впаивают сопротивления R21 и R22. На вход ОУ DA4. Уст. Значение сопротивления R14 и конденсатора C3 в цепи обратной связи ОУ DA1. При которых постоянная времени фильтра будет соответствовать постоянной времени 
Для корректировки постоянной времени фильтра включают фильтр в режиме непрерывного тока и при произвольном значении коэф. передачи фильтра корректир. его постоянной времени таким образом, чтобы при скачкообразное изменение сигнала задания тока рассогласование между сигналами на выходе DA1 и на выходе датчика тока сост. min значение.
Измерения производят по осцилографу при подключении его потенц. входа к выходу усилителя DA1, а земля к выходу датчика тока. (корректировка производится сопротивлением R14).
После чего уст. коэффициент передачи фильтра = 1. Путем подбора сопротивления R6. При этом необходимо получить равенство сигналов на входе или выходе фильтра. Затем производится настройка коэф. (коэф. передачи сумматора DA4).
Первоначально в режиме прерывистого тока (при min значении коэф.) осуществляют проверку точности слежения частоты среза контура за величиной  .
.
|
|
|
Для этого так же, как было описано ранее проверяют рассогласование между сигналом на выходе DA1 и на выходе датчика тока при скачке задания тока.
При наличии большого рассогласования добиваются его умньшения путём увеличения коэф. К. Изменение коэф. передачи осуществляется сопротивлением R21 и R22.
Далее неоходимо убедиться в допустимости полученого коэф. с точки зрения переходных процессов при возмущающем воздействии в режиме непрерывного тока.
После проведения индивидуальной настройки средств адаптации, они возможно совместно введены в работу, что должно значительно улучшить условия адаптпции в целом.
29. Особенности наладки контура скорости
Параметры входных цепей РС определяют расчитанным в статике Кос


Требуемый коэф. передачи ОС формируется за счёт выбора соответствующего сопротивления Rзс и Rос:


Max сигнал задания скорости должен соответствовать:
-для однозонных – nom скорости
-для двухзонных – max скорости
Соответственно расчитывается сигнал задания скорости:

Параметры регулятора расчитываются по известной методике.
При наладке 1-й зоны в 2-х зонных ЭП предварительно регулируются токи возбуждения, устанавливается I в.ном.
При этом на вход регулятора ЭДС нужно установить max сигнал задания ЭДС обеспечив тем самым насыщение регулятора ЭДС.
Предварительно выставляют огр. РС 2-3В либо другую расчитанную величину.
Выполняют фазировку ОС по скорости, для чего отключают тахогенератор и шунтируют конденсатор в цепи ОС ренулятора (если есть в схеме), на вход РС подают min значение Uзад при вращающемся двигателе. Опред. Полярность на отключенном конце ТГ(BR).
Если фазировка ОС по скорости выполнена не верно, то при любом задающем сигнале – ЭП набирает скорость до max в виду положительной ОС по скорости.
На входе РС без ЗК подают прямоугольный 2-х полярный (для реверсивных ЭП) сигнал задания скорости частота которых зависит от быстродействия ЭП (обычно несколько герц), а амплитуда соответсвует скорости близкой к nom (несколько меньшей, чтобы регулятор ЭДС не выходил из ограничения).
Для приводов с блоком нелинейного токоограничения сигнал задания скорости двигателя соответствует скорости при которой блок нелтнейного токоограничения (БНТО) неогранич. дополнительным сигналом на выходе РС.
|
|
|
Производится пуск ЭД и его реверс.
Диаграммы скорости и тока имеют следующий вид:
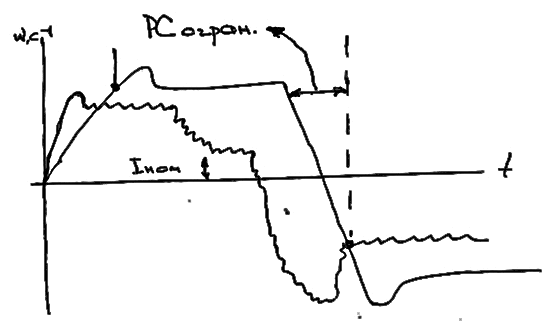
При наличии компл. положительной ОС по ЭДС в ЭД изменяя её глубину доб. Получения прямоугольной формы токовой диаграммы.
Далее устанавливают требуемый уровень огр. Регулятора скорости контролируя величину max допустимого тока якоря.
По характеристике ПП промзводится корректировка коэф. усиления и постоянной времени РС.
В ЭП с блоком нелин. токоонранич. производится пуск на  с целью проверки блока нелин. токоограничения.
с целью проверки блока нелин. токоограничения.

30. Ограничение тока якоря. Задатчик интенсивности
Благодаря применения блока ограничения выходного напряжения РС, когда последний находится в режиме насыщения не может превысить  и этим достигается ограничение тока якоря по заданному уровню.
и этим достигается ограничение тока якоря по заданному уровню.
В период пуска для вх. цепей для РТ можно записать:
 кэф. передачи канала ОС по току.
кэф. передачи канала ОС по току.
Система в любом режиме будет ограничивать опорный ток по значению  который может быть превышен только в 1-й момент после ограничения РС за счёт ПП в контуре тока.
который может быть превышен только в 1-й момент после ограничения РС за счёт ПП в контуре тока.
Аналогичным образом производится расчет и настройка устройств оераничения других координат ЭП.
Задатчик интенсивности
Постоянное ускорение при любом характере изменения момента сопротивления в процессе разгона/торможения может быть обеспечена когда пуск осущ при контроле скорости с использованием ЗИ.
Одна из схем ЗИ была приведена ранее.
Напряжение на выходе ЗИ опредеоим:

K – постоянная интегрирования.
При работе РС в активном режиме:


Откуда находим 
Прочими величинами в том числе требуемым ускорением.
Очевидно что при пуске с ЗИ контур скорости должен быть замкнут, т.е. РС не должен ограничиваться, это означает что велмчина ускорения:

Ускорение обеспечивается при помощи ЗИ и должно быть таким, чтобы при любом значении момента нагрузки значение тока при заданном ускорении было меньше значения  при котором РС ограничивается.
при котором РС ограничивается.
При этом роль ограничителя РС сводится к ограничению  в не нормальных режимах.
в не нормальных режимах.
|
|
|
|
|
|
