 |


Теоретические сведения о принципах моделирования в VisSim
|
|
|
|
Линейных систем
Использование математического компьютерного моделирования может позволить адекватно изучать механизмы явлений и управлять объектами и системами. Используя несколько основных принципов, таких как принцип информационной достаточности, принцип осуществимости, принцип множественности моделей, принцип агрегирования, принцип параметризации можно построить модель любой системы.
Компьютерные математические модели объектов управления можно использовать как для анализа, так и для синтеза систем регулирования.
Система VisSim предназначена для решения задач компьютерного моделирования, относящихся к разным группам:
- линейные системы;
- нелинейные системы;
- непрерывные во времени системы;
- дискретные во времени системы;
- системы с изменяемыми во времени параметрами;
- гибридные системы;
- многоцелевые и многокомпонентные системы;
- одновходовые и одновыходовые системы SISO;
- многовходовые и многовыходовые системы MIMO.
Система VisSim имеет типовые библиотечные блоки, из которых может легко собираться модель как простая, так и самая сложная.
Блоки выбираются с панели блоков щелчком левой клавиши или из одной из групп библиотеки блоков в позиции Blocks меню.
При создании модели пользователь имеет возможность задавать параметры, которые определяют их функции преобразования. После подготовки модели она может быть запущена, то есть можно начать собственно моделирование, при этом программа обеспечивает автоматическое решение системы алгебраических и дифференциальных уравнений для создаваемой модели и позволяет пользователю вести наблюдение за процессом моделирования по виртуальным приборам.
|
|
|
После того как пользователь проведет настройку используемых при моделировании блоков, необходимо настроить Свойства моделирования.
Настройку параметров моделирования можно осуществить в меню Simulate. Где изменяя настройки, можно регулировать процесс компьютерного моделирования.
Позиция Simulate имеет следующие команды:
Go – пуск моделирования;
Stop – остановка моделирования;
Single Step – пуск очередного шага при пошаговом моделировании;
Continue – продолжение моделирования после остановки;

 Reset Sim – сброс моделирования;
Reset Sim – сброс моделирования;
Simulation Properties... – вывод окна свойств (параметров) моделирования;
Optimization Properties... – вывод окна свойств оптимизации;
Snap States – моделирование с запоминанием состояния;
Reset Srates – сброс состояния.
Время моделирования и размер шага можно настроить в меню Range:
Start – начальное время моделирования;
Step Size – размер шага моделирования;
End – конечное время моделирования.
Размер шага Step Size указывает на интервал, по прошествии которого алгоритм метода интегрирования обновляет значение интеграла входной переменной, просмотр результатов моделирования можно осуществлять с помощью блоков таких как: блок цифрового индикатора (display) или графопостроителя (plot). При большом шаге моделирования, полученные результаты могут не соответствовать ожидаемому результату, на осциллографе будут представлены колебания величин и это может привести к остановке модели в связи с переполнением разрядной сетки используемых при компьютерном моделировании величин. В программе предусмотрена процедура сброса ошибок, для этого нужно выполнить команду Clear Errors в позиции Edit меню.
Выполняя компьютерное моделирование в программе VisSim, пользователь имеет возможность варьировать временной шаг интегрирования, но это может привести к увеличению шагов моделирования, а, следовательно, и к росту времени моделирования. Адаптивный метод регулирования шага интегрирования позволяет осуществлять компьютерное моделирование и получать результаты с разными (медленными и быстрыми) участками.
|
|
|
Иногда, например, при использовании блоков систем Mathcad и МАТLAB, на которые возложены основные операции моделирования, желателен однократный запуск модели. Для этого достаточно установить начальное время моделирования Start = 0 и задать Step Size = End = 1. При этом будет выполнен только один шаг моделирования.
На вкладке Range программы VisSim можно также задать ряд опций режимов компьютерного моделирования.
Run in Real Time – режим расчетов в реальном времени (или свободный с максимальной производительностью компьютера);
Auto Restart – задание автоматического перезапуска моделирования (режим «непрерывного» моделирования);
Retain State – сохранение данных предшествующего компьютерного моделирования.
Моделирование систем часто требует реализации функции интегрирования 
 .
.
Для интеграторов можно использовать различные алгоритмы численного интегрирования.Алгоритмы с равномерным шагом интегрирования обеспечивают высокую скорость интегрирования, но могут привести работу модели к числовой нестабильности. Если выбирается адаптивный алгоритм с переменным шагом, то надо дополнительно определить минимальный размер шага, допуск ошибки и количество возможных итераций, иначе моделирование может зациклиться.
В VisSim существует ряд алгоритмов интегрирования различной степени точности:
- метод Эйлера;
- метод трапеций;
- метод Рунге-Кутта 2-го порядка;
- метод Рунге-Кутта 4-го порядка;
- адаптивный метод Рунге-Кутта 5-го порядка;
- адаптивный метод Булирша-Стоера;
- обратный метод Эйлера для жестких систем дифференцианых уравнений.
Пользователь имеет возможность выбрать нужный метод на вкладке Integration Method.
Метод Эйлера – это простой одношаговый метод интегрирования. Оценка значения вычисленного интеграла выполняется один раз за шаг симуля 
 ции. При оптимальном выборе шага метод обеспечивает самую высокую скорость моделирования. Но он критичен к выбору шага и нередко приводит к расхождению решения. Да и точность метода явна невысока.
ции. При оптимальном выборе шага метод обеспечивает самую высокую скорость моделирования. Но он критичен к выбору шага и нередко приводит к расхождению решения. Да и точность метода явна невысока.
Метод трапеций имеет на порядок меньшую погрешность. Оценка значений интеграла выполняется дважды за шаг моделирования. Этот метод пригоден для решения многих задач моделирования, если его результаты представимы гладкими и не слишком быстро изменяющимися кривыми.
|
|
|
Метод Рунге-Кутта 2-го порядка имеет второй порядок. Он вычисляет производную в середине шага для оценки значения интеграла в конечной точке шага. По точности вычислений он эквивалентен методу трапеций.
Метод Рунге-Кутта 4-го порядка имеет погрешность на два порядка меньше, чем у методов трапеций и Рунге-Кутта 2-ого порядка. Метод рассчитывает производную четыре раза на каждом шаге: в начальной точке, дважды в середине шага и в конце шага. Результаты используются для оценки значения интеграла. Это надежный и апробированный метод, пригодный для решения большинства задач моделирования, за исключением жестких.
Адаптивный метод Рунге-Кутта 5-го порядка имеет точность пятого порядка. Адаптивность метода заключается в том, что при ускорении изменений входных координат алгоритм автоматически уменьшает размер шага. Это уменьшает вероятность «разноса» решений.
Адаптивный метод Булирша-Стоера использует полиномиальную экстраполяцию для оценки значения интеграла в конечной точке шага на основе серии предыдущих значений. Алгоритм обладает малой погрешностью для гладких функций (в типовых режимах движения, когда координаты меняются с постоянной скоростью, ускорением или приращением ускорения). Это достаточно эффективный современный метод интегрирования.
Обратный метод Эйлера наиболее эффективен для моделирования жестких систем с большой разницей частот собственных колебаний или постоянных времени моделей. Ктаким системам относятся электронные цепи, модели химических и иных процессов. Другие методы требовали бы установки существенно меньшего размера шага для устойчивого (без разноса) моделирования.
В VisSim имеется три типа интегрирующих блоков:
- блок идеального интегратора 1/S;
- блок интегрирования с насыщением Limited Integrator;
- блок интегрирования со сбросом Reset Integrator.
Функцию интегрирования (1.1) реализует блок идеального интегратора 1/S.
|
|
|
 . (1.1)
. (1.1)
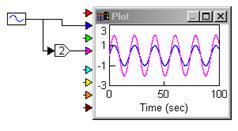
Его обозначения исходят из операторного выражения для операции интегрирования. Интегрирование задается от начального момента времени tmrt до конечного tend. Таким образом, блок вычисляет численное значение определенного интеграла при начальном значении (условии) y(tstart). Идеальность блока заключается в отсутствии ограничений на значение вычисленного интеграла у, максимальное и минимальное значение которого могут ограничиваться только разрядной сеткой компьютера. На рис. 1.1 представлен пример использования блока идеального интегратора.

Р и с. 1.1. Использование блока идеального
интегратора
В данном примере осуществляется интегрирование константы 0,02 (красная кривая) и интегрирование синусоиды при нулевом начальном значении (коричневая кривая).
Интегрирование задается методом Рунге-Кутта 2-го порядка, установленным по умолчанию. Окно установки параметров (свойств) идеального интегратора, представлено на рис. 1.2 и позволяет задать начальное значение Y (Initial Condition), идентификационный номер интегратора, зафиксированное состояние интегратора (Checkpoint State), задание метки блока (Label).
Необходимо сделать некоторые замечания о параметрах интегратора. Начальное значение Initial Condition можно сделать любым, исходя из условий физической реализации поставленной задачи, или назначить нулевое значение.

Р и с. 1.2. Применение блока
идеального интегратора
Идентификационный номер позволяет задать номер интегратора, если при моделировании предусмотрено использование нескольких интеграторов. Блок интегрирования с насыщением Limited Integrator возвращает сигнал, который может изменяться только в том случае, если он находится в заданных пределах low < у <иp. Если у достигает значения нижнего порога low (нижнее значение), то дальнейшее уменьшение сигнала на выходе ограничивается значением l. Аналогично, если сигнал на выходе достигает верхнего предела иp (верхнее значение), он перестает изменяться.
Блок Limited Integrator, представленный на рис. 1.3, более корректно отслеживает работу функции интегрирования и рекомендуется к применению в том случае, когда надо ограничивать пределы изменения выходного сигнала. Блок имеет один выход и три входа. На верхний вход подается интегрируемый сигнал, а на входы ниже – пороговые сигналы low и up. Применение блока показано на рис. 1.3. Окно установки параметров этого блока аналогично представленному на рис. 1.2.

Р и с. 1.3. Пример использования интегратора
с насыщением
Этот блок подобен интегратору на операционном усилителе, у которого уровни выходного напряжения ограничены некоторыми порогами.
|
|
|
Еще один тип интегратора в системе VisSim представлен блоком интегрирования со сбросом resetIntegrator. Этот блок также имеет три входа и один выход. Верхний вход служит для подачи подлежащего интегрированию сигнала, средний – для подачи управляющего сигнала b и нижний для задания уровня сброса r. Если уровень сигнала на управляющем входе по абсолютному значению меньше 1, то интегратор интегрирует как обычно. В противном случае интегратор сбрасывается и прекращает интегрирование. При этом сигнал на его выходе устанавливается равным значению сигнала на нижнем выходе r.Пример работы интегратора со сбросом приведен на рис. 1.4. Здесь сигнал сброса формируется с помощью двух ступенек и блока суммирования.
Одна ступенька (единичный положительный перепад) формируется с задержкой на 20 с, а другая (единичный отрицательный перепад) – с задержкой в 60 с. В результате на выходе схемы суммирования создается прямоугольный им пульс с амплитудой 1, задержкой 20 с и длительностью 40 с. Он и используется для сброса интегратора.

Р и с. 1.4. Пример использования интегратора
со сбросом
Окно установки параметров у интегратора со сбросом такое же, как у идеального интегратора. Блок суммирования summingJunctions служит для выполнения операции y = xl + x2, где xl и х2 – сигналы на входах блока.
Этот блок может использоваться с векторными и матричными данными. По любому входу можно задать операцию вычитания. Для этого при нажатой клавише Ctrl подведите курсор мыши к нужному входу и в момент смены образа курсора на стрелку нажмите правую кнопку мыши. Знак + у входа сменится на знак – (рис. 1.5).

Р и с. 1.5. Блок суммирования/вычитания
Линейные системы состоят из множества связанных между собой элементов. Элементом является неделимый в рамках данной системы компонент сложных объектов, явлений и процессов. Элемент может в свою очередь быть системой более низкого уровня или подсистемой. Систему можно также определить и как множество с некоторыми дополнительными характеристиками.
Многие даже простые технические устройства являются системами; поскольку в них явно выделяется множество отдельных элементов и даже входящих в них подсистем. Если такие системы используются для управления и контроля, то их называют управляющими системами или системами контроля.
Если коэффициенты передачи элементов систем не зависят от уровня сигналов, то системы относятся к линейным системам.
Рассмотрим простейшие линейные системы. На рис. 1.6 представлены три варианта моделей простейших линейных устройств.
Вариант, представленный на рис. 1.6 сверху, соответствует представлению о классическом усилителе, охваченном отрицательной обратной связью. Для ее осуществления в усилителе используется суммирующее устройство, нижний вход которого задается как вычитающий. В системе отчетливо выделяется прямой канал и канал обратной связи, через который часть выходного сигнала подается на инвертирующий вход усилителя.
В общем случае, как сама система, так и канал обратной связи имеют комплексные коэффициенты передачи.


Р и с. 1.6. Два варианта линейных систем
При этом они представляются действительными коэффициентами передачи, умноженными на соответствующие передаточные функции. В нашем случае действительный коэффициент передачи основного модуля системы равен 10, а действительный коэффициент передачи цепи обратной связи равен 0,5.
Если бы коэффициенты передачи были только действительными величинами, то переходная характеристика такой системы была бы ступенькой. Но на самом деле она в нашем случае имеет достаточно сложный вид, что и показывают осциллограммы реакции системы на единичный скачок. Хорошо видно, что выходной сигнал содержит явно заметную колебательную затухающую компоненту. Все это указывает на то, что на самом деле обратная связь в данном примере является комплексной. На каких-то частотах она может иметь действительную составляющую, но на других еще и мнимую составляющую.
Из теории обратной связи известно, что комплексный коэффициент передачи системы с обратной связью, осуществляемой через инвертирующий вход, в операторной форме (1.2):
 (1.2)
(1.2)
Если пренебречь частотной зависимостью коэффициентов передачи прямого канала системы (усилителя) Ку и канала обратной связи  , то можно получить следующее выражение для коэффициента передачи безынерционной системы (усилителя) с отрицательной обратной связью (1.3):
, то можно получить следующее выражение для коэффициента передачи безынерционной системы (усилителя) с отрицательной обратной связью (1.3):
 (1.3)
(1.3)
В данном случае  =10, а
=10, а  =0,5, таким образом, К=10/(1+0.5×10)=10/6=1,667.
=0,5, таким образом, К=10/(1+0.5×10)=10/6=1,667.
Это соответствует установившемуся значению сигнала на выходе нашей системы. Заметим, что если бы обратная связь осуществлялась через неинвертирующий вход, то знак «+» в знаменателе последнего выражения надо было бы заменить на «-».
При этом обратная связь при отсутствии частотных искажений классифицируется как положительная.
В природе идеальных (безынерционных) систем не бывает. Если в каналах системы есть инерционные элементы, то коэффициенты передачи становятся комплексными, и это можно учесть соответствующими передаточными характеристиками в операторной форме, что сделано в данном случае заданием передаточных характеристик. В результате вычисление комплексного коэффициента передачи системы и ее переходной характеристики заметно усложняется, но не в случае применения системы VisSim. Из представленного примера на рис. 1.6 заметно, что VisSim легко моделирует реакцию инерционной системы на единичный скачок, то есть рассчитывает ее переходную характеристику.
Для теоретического анализа систем с обратной связью важное значение имеет случай, когда цепь обратной связи разомкнута (рис. 1.6 в центре). В этом случае «кольцо» системы разрывается и выпрямляется. Получается система, которая просто состоит из двух включенных последовательно звеньев.
Третий вариант на рис. 1.6 можно рассматривать как предыдущий, но теперь уже замкнутый в кольцо, т.е. с восстановленной цепью отрицательной обратной связи. При внимательном рассмотрении последнего варианта модели системы нетрудно заметить, что блоки «усиления» gain исключены. Но зато в блоках передаточных характеристик проставлены параметры Gain = 10 и 0,5. Это позволяет несколько упростить модель системы, сохранив все ее характеристики.
Задание на выполнение лабораторной работы
На примере моделирования линейной САР загрузки зернодробилки освоить и приобрести навыки самостоятельной работы в системе моделирования VisSim.
Для заданной САР подготовить исходные данные для моделирования, выполнить на компьютере все процедуры, необходимые при моделировании, по аналогии с демонстрационным примером; по результатам моделирования проанализировать устойчивость и качество системы.
Рассмотрим САР загрузки зернодробилки, функциональная схема зернодробилки представлена на рис. 1.7. Асинхронный приводной двигатель М1 приводит в движение шнек, который осуществляет загрузку зерна в дробилку.
Регулирование подачи зерна в дробилку, осуществляется за счет регулирования тока I двигателя М1. На систему действуют возмущения, которые вызваны характеристиками сырья, такими как твердость, вязкость, прочность гранул, размер зерен и т.д. Скачки напряжения тоже являются возмущающим воздействием. Электропривод приводит в движение шнек Ш совместно с редуктором Р1.

Рис. 1.7. Функциональная схема САР загрузки зерна
в дробилку
Регулируемая величина – сила тока I измеряется трансформаторами T1, Т2, Т3 ипреобразуется с помощью выпрямительной схемы Ларионова в сигнал U  , который подается встречно задающему напряжению – сигналу U0. Рассогласование подается на вход электронного усилителя, с выхода которого напряжение U2 через токосъемные кольца подается на обмотку возбуждения электромагнитной муфты скольжения (ЭМС). Увеличение напряжения U2 приводит к снижению скольжения ЭМС и увеличению угловой скорости выходного вала муфты, а, следовательно, и угловой скорости шнека Ш. Снижение напряжения U2 вызывает обратный эффект – уменьшает угловую скорость шнека. Снижение или увеличение угловой скорости шнека Ш, тем самым снижает или повышает количество зерна Q подаваемого на измельчение в дробилку. В случае если ток I становится больше номинального, это приведет к уменьшению
, который подается встречно задающему напряжению – сигналу U0. Рассогласование подается на вход электронного усилителя, с выхода которого напряжение U2 через токосъемные кольца подается на обмотку возбуждения электромагнитной муфты скольжения (ЭМС). Увеличение напряжения U2 приводит к снижению скольжения ЭМС и увеличению угловой скорости выходного вала муфты, а, следовательно, и угловой скорости шнека Ш. Снижение напряжения U2 вызывает обратный эффект – уменьшает угловую скорость шнека. Снижение или увеличение угловой скорости шнека Ш, тем самым снижает или повышает количество зерна Q подаваемого на измельчение в дробилку. В случае если ток I становится больше номинального, это приведет к уменьшению  и угловой скорости
и угловой скорости  вала шнека.
вала шнека.
Снижение подачи зерна в дробилку обеспечивает снижение тока электродвигателя до номинального значения. Уменьшение тока нагрузки приведет к росту рассогласования  , увеличению подачи зерна Q, и, соответственно, к росту тока нагрузки до номинального значения.
, увеличению подачи зерна Q, и, соответственно, к росту тока нагрузки до номинального значения.
Структурная схема САР показана на рис. 1.8. При моделировании САР в качестве возмущающего воздействия будем рассматривать один из факторов – отклонение напряжения питающей сети  UC.
UC.
Передаточные функции элементов САР имеют следующий вид:
 – объект регулирования по регулирующему воздействию;
– объект регулирования по регулирующему воздействию;
 – объект регулирования по возмущающему воздействию;
– объект регулирования по возмущающему воздействию;
 – редуктор;
– редуктор;
 – шнек;
– шнек;
 – ЭМС;
– ЭМС;
 – усилитель;
– усилитель;
 – трансформаторы тока и выпрямители.
– трансформаторы тока и выпрямители.

Рис.1.8. Структурная система САР загрузки зернодробилки
Параметры передаточных функций имеют следующий физический смысл:  − коэффициенты передачи соответствующих элементов системы;
− коэффициенты передачи соответствующих элементов системы;  − постоянные времени соответствующих элементов системы;
− постоянные времени соответствующих элементов системы;  − запаздывание, обусловленное транспортным запаздыванием потока зерна в шнеке и в приемном устройстве дробилки.
− запаздывание, обусловленное транспортным запаздыванием потока зерна в шнеке и в приемном устройстве дробилки.
Передаточные функции элементов САР зернодробилки могут быть реализованы с помощью блока Transfer Function. Данный блок Transfer Function служит для преобразования входного сигнала х в любой момент времени в выходной сигнал у, в соответствии с операторной передаточной функцией, которая может быть определена отношением полиномов (1.4):
 (1.4)
(1.4)
Здесь передаточная функция определена так, как это дано в документации по системе VisSim. Коэффициенты знаменателя обозначаются как а, а числителя – как b.
На рис. 1.9 представлено окно задания свойств передаточной функции, из рисунка видно, что пользователь может задавать функцию как из файлов, так и в виде полинома (тогда нужно задать параметр Gain и списки коэффициентов числителя Numerator и знаменателя Denominator). Данный блок Transfer Function можно применять как для моделирования непрерывных систем, так и для дискретных систем (в данном случае нужно задать интервал времени дискретизации dT.) Передаточная функция может быть задана в виде Z-преобразования.
Использование блока временной задержки Time Delay позволяет реализовать при компьютерном моделирование транспортное запаздывание при перемещении зерна.
Блок построен на буфере элементов памяти по принципу первый вошел – первый вышел. На первом шаге симуляции буфер заполняется значением, равным начальному условию. Сигнальный вход х расположен ниже.

Р и с. 1.9. Свойства блока Transfer Function
Блок реализует функцию (1.5):
 (1.5)
(1.5)
где t – текущее время моделирования (не путать с реальным);
td – величина чистого запаздывания, или у=0, если t < td, у= x(t – td), если иначе.
В окне свойств блока задаются: Initial Condition (Начальное условие, определяющее выходной сигнал на промежутке времени 0< t < td и по умолчанию равно 0), Max Buffer Size (Размер буфера, задает количество элементов памяти в буфере блока, по умолчанию, 4000) и Label (Метка блока). Пример применения блока дан на рис. 1.10. При наличии блока Time Delay во фрагменте блок-схемы VisSim не может определить ее частотную характеристику с помощью своей библиотеки анализа. Для решения этой задачи следует построить аппроксиматор звена чистого запаздывания либо на совокупности апериодических звеньев первого порядка, либо на фазосдвигающих звеньях.

Р и с. 1.10. Пример применения блока Time Delay
С помощью блока gain пользователь может осуществлять функцию у = gain∙x. Этот блок необходим при задании коэффициентов передачи элементов САР загрузки дробилки.
На рис. 1.11 представлено использование блока gain. Ступенчатое возмущающее воздействие  UC =70 В поступает через 10 секунд после начала расчета. Для формирования задающего воздействия используем блок const (константа), а возмущающего воздействия – блок ступенчатое воздействие (step block). Для регистрации переходных процессов на выходе САР выберем блок plot.
UC =70 В поступает через 10 секунд после начала расчета. Для формирования задающего воздействия используем блок const (константа), а возмущающего воздействия – блок ступенчатое воздействие (step block). Для регистрации переходных процессов на выходе САР выберем блок plot.
Р и с. 1.11. Использование блока gain
Порядок выполнения работы
1. Ознакомьтесь со всеми пунктами методических указаний.
2. Получите у преподавателя задание на выполнение лабораторной работы.
3. Составьте функциональную схему САР исследуемой системы.
4. Заполните схемное окно пакета VisSim необходимыми типовыми блоками и осуществите соединение блоков.
5. Согласно вашему варианту задания (табл. 1.1), введите необходимые параметры структурной схемы, используя диалоговые окна, и установите параметры моделирования.
6. Запустите модель и проанализируйте полученные результаты.
7. Покажите преподавателю результаты работы.
Таблица 1.1
|
|
|
