 |


Анализ объекта регулирования
|
|
|
|
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту
по дисциплине «Теория автоматического управления»
на тему: «Исследование линейных и нелинейных систем управления».
Реферат
32 с., 26 рис., 3 табл., 3 источника информации
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР, СИНТЕЗ, УПРАВЛЯЕМОСТЬ, НАБЛЮДАЕМОСТЬ, НЕЛИНЕЙНЫЙ, АВТОКОЛЕБАНИЯ
Основной задачей курсового проекта является практическое использование знаний, полученных в процессе изучения курса, развитие навыков в расчете и выборе оптимальных параметров настройки регуляторов одноконтурных систем регулирования при проектировании.
В данной работе синтезированы П-, ПИ-, ПИД-регуляторы для линейной САР, произведены анализ качества регулирования, оценка управляемости и наблюдаемости САР, для нелинейной САР определена возможность возникновения автоколебаний.
Содержание
Введение
1 Расчет параметров настройки типовых регуляторов линейной САР
1.1 Анализ объекта регулирования
1.2 Расчет коэффициентов передачи п-регулятора
1.3 Расчет параметров настройки пи-регулятора
1.4 Расчет параметров настройки пид-регулятора
2 Анализ переходных характеристик линейной сар
2.1 Оценка качества САР по каналу управляющего воздействия
2.2 Оценка качества САР по каналу возмущающего воздействия
2.3 Оценка запаса устойчивости САР
3 Оценка управляемости и наблюдаемости линейной САР
3.1 Анализ САР с п-регулятором
3.1.1 Разработка математической модели типа «вход-состояние-выход»
3.1.2 Структурная схема САР с п-регулятором
3.1.3 Оценка управляемости САР с п-регулятором
3.1.4 Оценка наблюдаемости САР с п-регулятором
3.2 Анализ САР с пи-регулятором
|
|
|
3.2.1 Разработка математической модели типа «вход-состояние-выход»
3.2.2 Структурная схема САР с пи-регулятором
3.2.3 Оценка управляемости САР с пи-регулятором
3.2.4 Оценка наблюдаемости САР с пи-регулятором
3.3 Анализ САР с пид-регулятором
3.3.1 Разработка математической модели типа «вход-состояние-выход»
3.3.2 Структурная схема САР с пид-регулятором
3.3.3 Оценка управляемости САР с пид-регулятором
3.3.4 Оценка наблюдаемости САР с пид-регулятором
4 Анализ нелинейной САР
4.1 Описание нелинейной САР
4.2 Оценка возможности возникновения автоколебаний
4.3 Моделирование нелинейной САР в simulink
Заключение
Список использованных источников
Введение
Всякая система регулирования может быть представлена рядом элементов, выполняющих определенные функции. В данной курсовой работе будут рассмотрены непрерывная система регулирования, состоящая из объекта регулирования, автоматического регулятора, и нелинейная система, включающая нелинейное звено.
Принципиально отличает объект регулирования от всех остальных элементов системы то, что он обычно бывает, задан и при разработке системы автоматического регулирования не может быть изменен, тогда как остальные элементы выбираются специально для решения заданной задачи управления.
Задача выбора параметров настройки в системе автоматического регулирования или управления состоит в том, чтобы найти такие параметры регулятора, при которых переходный процесс в системе удовлетворяет следующим требованиям:
· затухание переходного процесса должно быть интенсивным;
· перерегулирование должно быть минимальным;
· продолжительность переходного процесса должна быть минимальным.
Большинство уравнений объектов являются нелинейными, однако в этих случаях знание решений, полученных для линейных систем, часто дает возможность подойти к решению для нелинейной системы.
|
|
|
Расчет параметров настройки типовых регуляторов линейной САР
Анализ объекта регулирования
Кривая разгона показывает реакцию объекта регулирования на единичное ступенчатое воздействие. Она строится по данным, полученным в результате решения дифференциального уравнения системы при скачкообразном входном воздействии и нулевых начальных условиях.
Передаточная функция объекта регулирования
| ( |
Построим кривую разгона, с помощью системы MATLAB.
Script 1:
>> Wop=tf([0.9 7 2.2],[336 146 21 1]);
>> step(Wop);grid
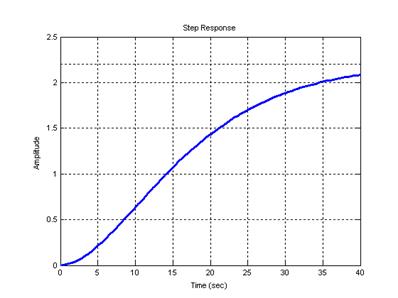
Рисунок 2 – Кривая разгона ОР
Анализируя разгонную характеристику, можно сделать вывод, что ОР обладает свойством самовыравнивания и запаздывания, является многоемкостным.
|
|
|
