 |


Оценка качества САР по каналу управляющего воздействия
|
|
|
|
По переходным характеристикам, полученным в пунктах 1.3-1.5 определим следующие показатели качества:
ymax1 – амплитуда первого максимума;
ymax2 – амплитуда второго максимума;
yуст – установившееся значение;
σ – перерегулирование;
ε – статическое отклонение.
tp – время регулирования;
tn – время нарастания;
tmax – время достижения первого максимума;
æ – декремент затухания;
T – период колебаний;
ω – частота колебаний;
n – колебательность;
Таблица 1 – Показатели качества САР по каналу управляющего воздействия
| Регуляторы | ymax1 | ymax2 | yуст | σ | ε | tp | tn | tmax | æ | T | ω | n |
| П | 1.14 | 0.895 | 0.854 | 33.6 | 0.146 | 41.7 | 5.23 | 12.3 | 6.98 | 24.7 | 0.25 | 1.5 |
| ПИ | 1.31 | 1.04 | 1 | 31 | 0 | 62.3 | 8.11 | 19.4 | 7.75 | 35.9 | 0.175 | 1.5 |
| ПИД | 1.33 | 1.05 | 1 | 32.6 | 0 | 50.3 | 6.33 | 14.3 | 6.6 | 29.7 | 0.21 | 1.5 |
Декремент затухания и частоту колебаний определяем по формулам
æ 
| |

|
Проанализировав полученные данные, можно сделать вывод, что каждая САР обладает своим рядом преимуществ и недостатков. САР с П-регулятором имеет наименьшее отклонение по амплитуде, но обладает статической ошибкой. У САР с ПИ-регулятором нет статической ошибки, но она имеет наибольшее время регулирования. САР с ПИД-регулятором наиболее быстродействующая, но она также обладает и наибольшим перерегулированием.
Оценка качества САР по каналу возмущающего воздействия
Для оценки качества САР по каналу возмущающего воздействия преобразуем структурную схему САР (рисунок 8).

Рисунок 8 – Структурная схема преобразованной САР
Определим передаточную функцию САР по возмущающему каналу:
Script 10:
>> Fiz1=feedback(Wop,Wap1)
Transfer function:
0.9 s^2 + 7 s + 2.2
-------------------------------------
336 s^3 + 148.4 s^2 + 39.64 s + 6.859
|
|
|
>> Fiz2=feedback(Wop,Wap2)
Transfer function:
0.9 s^3 + 7 s^2 + 2.2 s
--------------------------------------------------
336 s^4 + 147.1 s^3 + 29.56 s^2 + 4.348 s + 0.2156
>> Fiz3=feedback(Wop,Wap3)
Transfer function:
0.9 s^3 + 7 s^2 + 2.2 s
-----------------------------------------------
337.8 s^4 + 162.1 s^3 + 40 s^2 + 6.77 s + 0.396
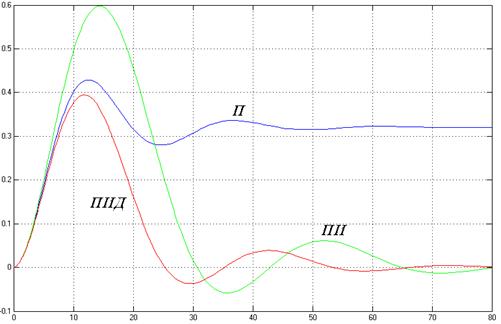
Рисунок 8 – Переходные характеристики САР по каналу возмущающего воздействия
Таблица 2 – Показатели качества САР по каналу возмущающего воздействия
| Регуляторы | ymax1 | ymax2 | yуст | σ | ε | tp | tn | tmax | æ | T | ω | n |
| П | 0.429 | 0.336 | 0.321 | 33.6 | 0.321 | 41.7 | 5.23 | 12.3 | 0.86 | 24.6 | 0.26 | 1.5 |
| ПИ | 0.598 | 0.061 | 0 | ¥ | 0 | 73.5 | 0 | 14.3 | 0.898 | 37.7 | 0.167 | 2 |
| ПИД | 0.39 | 0.04 | 0 | ¥ | 0 | 49 | 0 | 14 | 0.897 | 30 | 0.21 | 1.5 |
Проанализировав полученные данные, можно сделать вывод, что по каналу возмущающего воздействия САР с П-регулятором имеет наименьшее отклонение по амплитуде, но обладает статической ошибкой. У САР с ПИ-регулятором нет статической ошибки, но она имеет наибольшее время регулирования. САР с ПИД-регулятором наиболее быстродействующая.
Оценка запаса устойчивости САР
Для оценки запаса устойчивости применим логарифмический критерий. При проектировании САР рекомендуемый запас устойчивости по амплитуде ∆L>6 Дб, по фазе ∆φ>300.
Script 11:
>> [Gm1,Pm1]=margin(W1);
>> [Gm2,Pm2]=margin(W2);
>> [Gm3,Pm3]=margin(W3);
>> [20*log10(Gm1),Pm1]
ans =
Inf 41.6235
>> [20*log10(Gm2),Pm2]
ans =
Inf 36.7183
>> [20*log10(Gm3),Pm3]
ans =
Inf 36.0532
Таблица 3 – Запас устойчивости САР
| Регуляторы | ∆L | ∆φ |
| П | ¥ | 41.6 |
| ПИ | ¥ | 36.7 |
| ПИД | ¥ | 36.1 |
Проанализировав полученные данные, можно сделать вывод, что необходимым запасом устойчивости и по амплитуде, и по фазе обладают все САР.
Оценка управляемости и наблюдаемости линейной САР
Анализ САР с П-регулятором
Разработка математической модели типа «вход-состояние-выход»
Основная передаточная функция САР с П-регулятором была получена в п. 1.3. Она имеет вид:
 ,
,
где  ,
,

Порядок характеристического полинома  . Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
. Для данной САР выбираем вторую управляемую форму или управляемое каноническое представление (УКП). Математическая модель САР описывается следующей системой векторно-матричных уравнений:
|
|
|
|
где 
Script 12:
>> b2=2.397;b1=18.64;b0=5.859;
>> a3=336;a2=148.4;a1=39.64;a0=6.859;
>> A1=[0 1 0;0 0 1;-a0/a3 -a1/a3 -a2/a3];
>> B1=[0;0;1];
>> C1=[b0/a3 b1/a3 b2/a3];
>> D1=0;
>> sys1=ss(A1,B1,C1,D1)
a =
x1 x2 x3
x1 0 1 0
x2 0 0 1
x3 -0.02041 -0.118 -0.4417
b =
u1
x1 0
x2 0
x3 1
c =
x1 x2 x3
y1 0.01744 0.05548 0.007134
d =
u1
y1 0
Continuous-time model.
>> step(sys1);grid

Рисунок 9 – Переходная характеристика САР с П-регулятором
При исользовании модели «вход-выход» и модели «вход-состояние-выход» были получены абсолютно идентичные переходные характеристики (рисунки 4 и 9), следовательно, модель «вход-состояние-выход» для САР с П-регулятором рассчитана, верно.
|
|
|
