 |


Структура импульсной СУ следящим приводом.
|
|
|
|
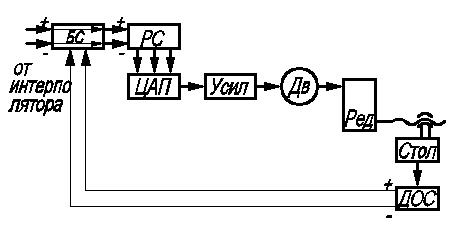
От интерполятора приходит один импульс на вход «+» от реверсивного счетчика (РС ), что означает требование переместить стол на одну единицу дискретности. Импульс проходит через блок синхронизации (БС ) и в счетчике записывается «+1». Число, записанное в счетчике, преобразуется цифроаналоговым преобразователем (ЦАП ) в пропорциональное единице аналоговое напряжение. После усиления двигатель через механические передачи перемещает стол на одну единицу дискретности. После чего ДОС выдает импульс, который через блок синхронизации поступает на вход «-» реверсивного счетчика. Содержимое счетчика становится равным 0, на выходе ЦАП - ноль, двигатель останавливается. Таким образом, привод работает при очень маленькой величине подач, когда двигатель успевает отработать каждый импульс.
При большой величине подачи двигатель не успевает отработать каждый импульс и в РС может накапливаться число импульсов соответствующему отставанию действительного положения стола от требуемого. Это число может достигать несколько тысяч импульсов.
БС служит для разделения по времени импульсов от интерполятора и от ДОС. Их совпадение на входах реверсивного счетчика приводит к неопределенной ситуации.
В системах класса CNC часть функций (БС, РС, ЦАП, усилитель) могут выполняться управляющей вычислительной машиной.
Достоинства:
1. возможность использования прецизионных высокоточных датчиков;
2. все основные функции выполняют цифровые устройства, что позволяет легко передать их микропроцессору;
3. кроме усилителя другие электронные устройства не нуждаются в настройке.
Недостатки:
1. высокая стоимость прецизионных датчиков;
2. низкая помехоустойчивость привода, поэтому электронные устройства требуют тщательной защиты от помех.
|
|
|
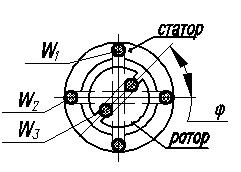 29 Фазовые датчики.
29 Фазовые датчики.
В статоре находятся две взаимно перпендикулярные обмотки W1 и W2. На роторе расположена обмотка W3. На статорные обмотки подключаются напряжения синусоидальные одинаковой амплитуды, одинаковой частоты, но сдвинутые по фазе друг относительно друга на 900. Таким образом, на обмотку W1 подается напряжение:
На обмотку W2:
В обмотке ротора W3 наводится ЭДС:

Т.е. напряжение в роторной обмотке зависит от угла поворота  ротора.
ротора.
Таким образом, фаза выходного напряжения относительно питающего будет сдвинута на угол равный углу поворота ротора. По этой фазе можно судить о положении ротора. Такой датчик называется вращающимся трансформатором (ВТ). Наибольшее распространение получил датчик ВТМ-4Б. Имеются конструкции, которые позволяют за один оборот ротора несколько раз менять фазу выходного сигнала. Они называются редусины или редуктонилы, т.к. в них осуществляется электрическая редукция фазы выходного сигнала.
Имеются конструкции с плоскими обмотками, которые называются индуктосины. Конструктивно они бывают как плоскими, так и круговыми.
Точность для ВТ может достигать 2-3 угловых минут.
 - для 2-х угловых минут.
- для 2-х угловых минут.
Угловая точность для круговых индуктосинов с плоскими обмотками составляет 2-3 угловые секунды.
Для линейных индуктосинов – 2-3 микрона на 250 мм длины.
Достоинства:
1. относительно невысокая стоимость;
2. высокая точность;
3. высокая потенциальная помехоустойчивость.
Недостатки:
1. необходимость применения прецизионных схем для питания, усиления и фильтрации выходного сигнала с датчика;
2. точность ниже, чем у импульсных датчиков.
В станках эти датчики применяются очень широко, кроме того, фазовый сигнал датчика может быть использован непосредственно для управления, но тогда сигнал от интерполятора предварительно нужно преобразовать в фазовый сигнал.
|
|
|
30 Структура фазовой СУ следящим приводом.

Генератор опорного сигнала ГОС выдает напряжения для питания ДОС и опорное напряжение  на импульсно - фазовый преобразователь (ИФП). служит точкой отсчета для фазы управляющего сигнала.
на импульсно - фазовый преобразователь (ИФП). служит точкой отсчета для фазы управляющего сигнала.
ИФП преобразует количество пришедших импульсов от интерполятора в синусоидальное напряжение с фазой  (требуемое положение стола).
(требуемое положение стола).
Сигнал с ИПФ сравнивается с сигналом с датчика (ВТ) фазово-сравнивающим устройством (ФС У), где  - фаза, показывающая действительное положение стола.
- фаза, показывающая действительное положение стола.
Сигнал с ФСУ усиливается электронным усилителем в К раз до необходимой мощности для питания электродвигателя (М), который через механические передачи перемещает стол до тех пор, пока не совпадет с . В настоящее время предпочитают сигнал с фазового датчика преобразовывать в цифровую форму и сравнивать между собой числа: число от интерполятора, т.е. требуемое положение, и число от датчика, т.е. действительное положение.
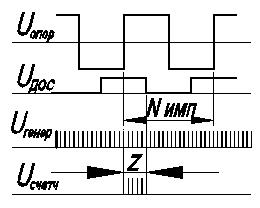
Где: - напряжение опорного сигнала;
 - период опорного сигнала;
- период опорного сигнала;
 - напряжение с ДОС, которое преобразуется из синусоидального в цифровую форму;
- напряжение с ДОС, которое преобразуется из синусоидального в цифровую форму;
 - напряжение с высокочастотного генератора;
- напряжение с высокочастотного генератора;
Z - количество импульсов от генератора пришедших между передним фронтом опорного сигнала и задним фронтом сигнала от датчика.
Тогда:
= 3600*Z/N.
Этот способ имеет преимущество в том, что в качестве сравнивающего устройства может использоваться ЭВМ в уже имеющемся управляющем устройстве и цифровое значение может передаваться непосредственно на цифровую индикацию.
|
|
|
