 |


Управление транспортно-перегрузочными процессами.
|
|
|
|
Понятие об АСУ ТСК
Процессами
Для практической реализации и достижения высокого экономического эффекта при создании АСУ ТСК необходимо руководствоваться следующими научными принципами: оптимальность,
системный подход и д е к о м и о з и ц и я. Сущность перво-го принципа состоит в том, что оперативные планы работы, которые разрабатываются ЭВМ, должны обеспечивать получение наилучших технико-экономических показателей; повышение производительности труда и значительную экономию трудовых ресурсов; существенное улучшение использования грузоподъемности и вместимости транспортных средств; снижение эксплуатационных затрат и т. д.
ТСК тесно взаимодействует с цехами и производственными участками, с соседними железнодорожными станциями. Кроме того, АСУ ТСК является элементом АСУ транспортного цеха предприятия, железнодорожной станции, транспортного узла. Между транспортными объектами и ТСК имеет место постоянное технологическое взаимодействие. Все это обосновывает необходимость обеспечения системного подхода при создании АСУ, и прежде всего при построении экономико-математических моделей планирования и управления ТСК: при разработке унифицированной системы кодирования, учитывающей интересы не только складского объекта, но и корреспондирующих с ним цехов предприятия, соседних станций, а возможно, и отрасли; при построении базы данных и информационного обеспечения, которые можно было бы эффективно использовать в случае развития системы АСУ и др.
В рамках АСУ ТСК на различных уровнях управления решаются десятки различных оперативно-технологических задач, которые содержат сотни управляемых параметров.
|
|
|
Реализация глобальной экономико-математической модели оперативного планирования и управления ТСК, которая связывает управляемые параметры, целевую функцию и сопровождающие ее ограничения, весьма затруднительна.
Для решения такой многоразмерной задачи требуется немало времени, что нарушает оперативный режим планирования и его эффективность. Не все задачи связаны общими параметрами управления, поэтому целесо-
гласованности. При упомянутых ограничениях координирующие воздействия могут изменяться в определенной области.
Оптимизация оперативного планирования работы ТСК осуществля-ется в такой последовательности:
• содержательное описание задач и их математическая формулировка;
• выявление функциональной зависимости и информационных связей между отдельными подпроцессами и отвечающими им задачами;
• синтез глобальной экономико-математической модели;
• расчленение, декомпозиция (для упрощения расчетов) этой моде-
ли на отдельные блоки с учетом обеспечения межуровневого согласования;
• построение и отработка алгоритма программы решения задач на ЭВМ.
Экономико-математические модели, которые используют для решения оптимизационных задач оперативного планирования ТСК, разделяют на следующие основные типы в зависимости от числа решаемых задач — на глобальные и локальные, от характера управляемых процессов — на детерминированные и стохастические, от количества уровней управления системой — одно- и многоуровневые, от применяемых методов решения задач — на аналитические и имитационные, от числа критериев оптимальности — многоцелевые и одноцелевые. Кроме того, экономико-математические модели в зависимости от применяемых конкретных математических методов разделяют на модели математического программирования, вариационные, эвристические, сетевые и т. д. Встречаются модели, которые строят с применением нескольких математических методов.
|
|
|
 В векторной форме модель оптимального оперативного планирования ТСК записывается следующим образом.
В векторной форме модель оптимального оперативного планирования ТСК записывается следующим образом.
R* - min R(x, у, г, /;?, /, /, к) (2.22)
при:
(.v, v, г, т, /, j, к) > 0; (2.23)
xex,i (2.24)
>-eFn; (2.25)
--GZ0; (2.26)
шЕМп; (2.27)
о
•
/e/ft:. (2.28)
'0
уел; (2.29)
кЕК0; (2.30)
х ■ с/0 + у • Pq + т • /'0 < Q: (2.31)
где х, у —векторы, выражающие соответственно количество груженых и порожних вагонов различных типов, распределяемых по грузовым пунктам; вектор количества распределяемых ПТМ или поточных транспортных линии различных типов; количество автомобилей и других средств напольного транспорта различных типов, распределяемых на грузовых пунктах: Х(). Y{) и Л/0 — векторы, представляющие собой соответственно общее количество груженых и порожних вагонов, автомобилей и средств напольного транспорта, ожидающих на ТСК момента обслуживания; Z0—общее количество ПТМ и поточных т шип, которые могут быть задействованы для выполнения грузовых и складских операций: i—вектор, выражающий число используемых приоритетов при планировании обслуживания транспортных потоков: j— вектор числа грузовых фронтов на ТСК. которые обслуживаются при подаче и уборке вагонов с одного рейса; к — вектор количества грузополучателей. которым доставляются грузы (комплектующих изделий), транспортным средством с одного рейса; I0. J0, K0 — соответственно векторы общего количества воз-можных приоритетов, грузовых фронтов и грузополучателей: Q —количество груза. Поясним смысл ограничений.
Условие (2.23) очевидно и не требует пояснений, условия (2.24) — (2.27), (2.29), (2.30) выражают ограничения по использованию соответствующих ресурсов, а также грузовых фронтов и грузополучателей; условие (2.28) уточняет фактическое использование имеющихся приоритетов. Неравенство (2.31) требует соответствия необходимой и имеющейся в наличии перерабатывающей способности грузовых пунктов. В этом условии q,p0 и r()— соответственно средние загрузки груженых и порожних вагонов и автомобилей. Задача (2.22) — (2.31) формулируется так: необходимо найти такие параметры управления x* y* z* т * i* j* и k* которые бы доставили мини-
мум целевой функции (2.22) при соблюдении ограничений (2.23) — (2.31). Отметим, что перечисленными параметрами управления не ограничивается их число. Например, при планировании рейса стеллажного крана-штабелера-комплектовщика в качестве своеобразного обобщенного параметра выступает количество и размещение ячеек стеллажей, при обслуживании которых обеспечивается минимум времени рабочего цикла или суммарный пробег складской машины.
|
|
|
Уже отмечалось, что ТСК как объект планирования и управления представляет собой сложную систему, состояние которой определяется значительным числом внешних 11 внутренних факторов. Это приводит к необходимости применения математических методов для выбора наилучшего варианта организации перевозок с участием железнодорожного и других видов транспорта. Использование математических методов оптимизации позволяет учесть развитие и техническое состояние всех элементов ТСК, параметры технологических процессов, объемы перевозок, грузопотоки и другие характеристики распределяемых ресурсов и выполняемых операций и охватить весь процесс перевозок от прибытия грузов до вывоза их грузополучателем или передачи на другой вид транспорта.
Рассмотрим постановку задачи комплексного оптимального планирования и управления перевозками грузов с участием различных видов транспорта в ТСК.
Работа ТСК представлена в виде совокупности взаимосвязанных технологических операций, каждая из которых выполняется только одним из видов транспорта. Известны объемы перевозок грузов, которые должны быть осуществлены в течение заданного периода, и размеры ресурсов (людей, вагонов, автомобилей, ПТМ и др.), которые могут быть использованы для выполнения перевозок. При этом часть ресурсов спецанализирована для конкретного вида транспорта, а остальные ресурсы могут быть использованы на всех видах транспорта для выполнения любой из комплексных технологических операций.
Для формализации поставленной задачи предложена математическая модель планирования и управления работой ТСК в оперативном плановом периоде.
|
|
|
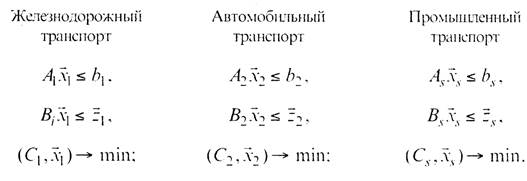
Каждая из отраслевых технологических операций в этой модели описывается областями допустимых значений входных и выходных
параметров и некоторым оператором, связывающим соответствующие области. Это позволяет построить математическую модель в виде блочной системы операторных неравенств и сформулировать задачу управления работой ТСК в виде задачи математического программирования, которая хорошо интерпретируется в терминах планирования работы разных видов транспорта.
Каждая технологическая операция в ТСК может быть задана трой-
кой математических объектов:
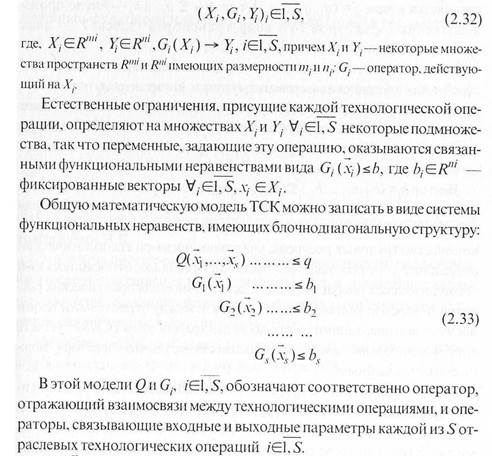 (jr,.,G,.,^el,S, (2.32)
(jr,.,G,.,^el,S, (2.32)
где, Xt Е Rn", }JE R"1, G, (Х}) —> Yh /El, S, причем Ж,- и К—некоторые множа-ства пространств R'1" и R'" имеющих размерности т и iif G- —оператор, действующий на Хг
Естественные ограничения, присущие каждой технологической операции, определяют на множествах Xi и Y. V,-E1,S некоторые подмножества, так что переменные, задающие эту операцию, оказываются связанными функциональными неравенствами вида Gf(xj)^b, где6,-Е/?/7/ — фиксированные векторы V,«El, S,.y; EJ^,,
Общую математическую модель ТСК можно записать в виде системы функциональных неравенств, имеющих блочнодиагональную структуру:
*
%£ V *Ч э• *• з*\v /......... Ч
Gx{xx).........<;/;,
G2(x2)...... ^b2
-
(2.33)
• • • • ■ • •
GAx,-)*bs
В этой модели Q и С, /El, 5", обозначают соответственно оператор, отражающий взаимосвязи между технологическими операциями, и операторы, связывающие входные и выходные параметры каждой из 5 отраслевых технологических операций /El, 5.
Под Xi; понимается вектор интенсивностей технологических способов отраслевых технологических операций i. При этом под технологическим способом понимается принятое сочетание производственных факторов (вагоны, автомобили, ПТМ и др.), которые могут участвовать
в отраслевой технологической операции в количествах, определяемых технологией организации работы в ТСК.
Таким образом, х = (Xi,..., Xim), где, например хi — интенсивность использования первого технологического способа, т. е. определенной этим способом совокупности людских ресурсов, вагонов, ПТМ и др., позволяющих, в единицу времени осуществить определенные объемы перевозок и грузовых работ в ТСК, хi2 — интенсивность использования технологического способа и т. д. Вектор q в общем случае представляется в виде(q= (q1,q2,...,qn)T, где здесь Т — знак транспонирования.
Компоненты этого вектора могут задавать как ограничения по ресурсам, так из здания по перевозкам грузов.
Например, определяет имеющиеся в ТСК трудовые ресурсы, специализированные по видам транспорта,объемы грузовых работ, которые могут быть выполнены в рассматриваемом периоде кранами, не специализированными по видам транспорта, и т. д.
|
|
|
Вектор B= {Bi1..... Bim) где Bi1 —количество технических средств
вида транспорта, осуществляющего 1-ю технологическую операцию (для железной дороги — это количество вагонов, локомотивов и др.); Bi1 — количество трудовых ресурсов, участвующих в 1-он технологической операции; Bi3 — производственные емкости складов, относящиеся к ни технологической операции, и т. д.
С достаточной для практических рас-четов точностью нелинейные взаимосвязи между отраслевыми технологическими операциями на разных видах транспорта в ТСК могут быть аппроксимированы линейными зависимостями, так что оператор Q можно считать линейным.
Для отдельных видов транспорта взаимосвязи между технологическими способами в рамках каждой отраслевой технологической операции могут быть аппроксимированы линейными зависимостями так, что операторы билинейны, причем Аi известные матрицы, столбцы которых описывают технологические способы ни отраслевой технологической операции.
Предполагается также, что компоненты вектора q являются значениями только общих ресурсов (подлежащих распределению диспетчером ТСК), а задания по перевозкам
 грузов для отдельных видов транспорта являются соответствующими компонентами векторов bi.. Принято, что эффективность планирования работы отдельных видов транспорта математически описывается линейными функционалами вида (Сi., хi), где Ci, —стоимостная оценка затрат, связанная с использованием технологического способа работы 1-го вида транспорта, а эффективность работы в целом определяется как суммарная эффективность планирования работы ТСК математически и описывается
грузов для отдельных видов транспорта являются соответствующими компонентами векторов bi.. Принято, что эффективность планирования работы отдельных видов транспорта математически описывается линейными функционалами вида (Сi., хi), где Ci, —стоимостная оценка затрат, связанная с использованием технологического способа работы 1-го вида транспорта, а эффективность работы в целом определяется как суммарная эффективность планирования работы ТСК математически и описывается
линейным функционалом вида 2 (Q.a;), который в рассматривае-
мой задаче планирования требуется минимизировать на множестве допустимых планов работы ТСК.
Математическая формулировка рассматриваемой задачи планирова-ния и управления перевозкой грузов в ТСК с учетом принятых условий такова:
где Q — множество допустимых решений системы ограничении математической модели работы ТСК.
Это задача программирования большой размерности. Рассмотренный ниже метод решения задачи планирования и управления различными видами транспорта позволяет преодолеть вычислительные трудности, связанные с большой размерностью.
Исходная задача разбивается на локальные задачи по видам транспорта и координирующую задачу диспетчера ТСК.
Локальные задачи ставятся так:
 |
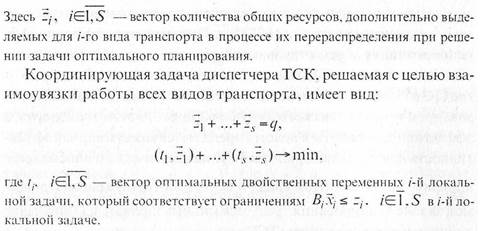
Поиск оптимального плана работы представляет собой процедуру последовательного решения задач, двойственных к сформулированным локальным задачам и координирующей задаче диспетчера ТСК. в ходе которого происходит согласование «возможностей» отдельных технологических операций и «интересов» в целом. Эта процедура в большинстве случаев является сходящейся, что позволяет после нескольких операций оборвать счет, когда изменение двойственных оценок становится меньше заданной величины е. т. е. когда некоторой итерацией с номером К будет установлено, что
 |
Таким образом, решение задачи комплексного планирования управления работой разных видов транспорта в ТСК удается разделить на решение задач планирования и управления работой отдельных видов транспорта и координирующей задачей их взаимодействия в узле.
Содержательная интерпретация предложенного метода решения задачи планирования и управления грузовыми перевозками с участием разных видов транспорта в ТСК такова.
Каждая отраслевая технологическая операция, отражающая ра-боту одного вида транспорта, выполняется с использованием определенного количества специфических для этой операции людских и технических ресурсов: вагонов, локомотивов и т. п. для железнодорожного транспорта; автомобилей, топливных ресурсов и т. п. для автомобильного транспорта и т. д.
Из изложенного выше можно сделать следующие выводы:
1. Совершенствование управления перевозочным процессом в ТСК при взаимодействии автомобильного, железнодорожного, водного и других типов транспорта является важным резервом ускорения доставки грузов, снижения непроизводительных затрат общетранспор-тных ресурсов, сокращения простоев автомобилей, вагонов и судов.
2. Важнейшими направлениями улучшения работы ТСК являются:
• комплексное планирование перевозок с участием разных видов транспорта;
• автоматизация процессов управления, механизация погрузочно-разгрузочных работ на основе внедрения микроэлектроники, роботов и робототехники:
• совершенствование оперативного планирования и управления работой автотранспорта при централизованном ввозе и вывозе грузов:
• развитие полного транспортно-экспеднционного обслуживания промышленных предприятий.
3. Оптимизация транспортных процессов в ТСК достигается на основе решения общетранспортной математической модели по критерию наилучшего использования имеющихся ресурсов и с применением методов линейного программирования.
|
|
|
