 |


Среда управления учебным исполнителем Робот.
|
|
|
|
322
 По этому алгоритму она ожидает нажатия любой кнопки на пульте. И когда кнопка, например «Вперёд», будет нажата, то программа фор мирует в памяти компьютера специальную команду и отправляет её по радиоканалу роботу. Робот принимает команду, и с помощью собствен ной программы, которая тоже установлена в памяти его процессора, выполняет разбор каждого символа в принятой команде. Если всё про шло удачно, нет ошибок и сбоев в принятой команде, тогда робот вы полняет порученное ему действие: двигается вперёд. И после выпол ненной команды обязательно посылает обратно на пульт ответ: «Всё прошло удачно. Команда выполнена».
По этому алгоритму она ожидает нажатия любой кнопки на пульте. И когда кнопка, например «Вперёд», будет нажата, то программа фор мирует в памяти компьютера специальную команду и отправляет её по радиоканалу роботу. Робот принимает команду, и с помощью собствен ной программы, которая тоже установлена в памяти его процессора, выполняет разбор каждого символа в принятой команде. Если всё про шло удачно, нет ошибок и сбоев в принятой команде, тогда робот вы полняет порученное ему действие: двигается вперёд. И после выпол ненной команды обязательно посылает обратно на пульт ответ: «Всё прошло удачно. Команда выполнена».
Ниже приведён пример такой команды, отправленной и принятой пультом.
Наверняка вас не пугают ребусы, шарады и головоломки. Вот и в приведённых выше двух строках ничего сложного нет.
Первая строка — это отправка команды с пульта на устройство: английское слово Write указывает, что происходит запись в порт. А вто рая строка, соответственно Read, — это чтение из порта ответа от ро бота.
Каждая строка начинается с даты и времени события, а следующие после знака двоеточие шестнадцатеричные коды будут вам понятны по сле знакомства со справочником команд. Для каждого действия на значен свой собственный шестнадцатеричный код.
Программы, как мы говорили ранее, пишутся на разных языках программирования. Например, существуют профессиональные языки: C (Си), Python (Питон), Java (Ява) или языки для тех, кто только начи нает изучать программирование: Scrath (Скретч), Кумир (Комплект Учебных МИРов). Мы будем использовать для написания программ язык Кумир.
В простейшем случае нам понадобится текстовый редактор и неболь шой справочник с подсказками, который можно вызвать, нажав на кла виатуре клавишу F1. При этом откроется окно, в котором будет указано, какую команду и в каком формате надо использовать.
|
|
|
Итак, если мы с пульта управления подали роботу четыре команды и, перейдя на вкладку «Технологические режимы», нажали кнопку «Про

Рис. 9. 11. Пример программы
грамма», то процессор сформировал необходимые команды, получив которые робот будет двигаться в заданном направлении столько раз, сколько команд мы записали в программе (рис. 9. 11).
А если у вас не один робот, а, например, шесть?! Как сделать так, чтобы два робота поехали в столовую, а остальные в библиотеку или спортзал?
В этом случае нужно использовать в программах указатели на то, какой конкретно робот нужен для исполнения конкретной задачи, т. е. MAC-адреса.
На рисунке 9. 12 показано, что из доступных шести устройств выбра- но два. Они отмечены синим цветом и звёздочкой около соответствую- щего MAC-адреса. Это роботы с адресами 00 13 А2 00 40 B2 4D 3D и 00
13 А2 00 40 B2 4D EE.
Когда на пульте будет установлен чекбокс (галочка) команды «Ис- пользовать выбранные устройства», команда исполнения будет отправ- ляться программой строго на выбранные устройства.
Ещё одной очень важной особенностью роботов является возмож- ность использования датчиков, о которых мы подробно говорили в 7 классе. С использованием датчиков робот превращается в мобиль-
324

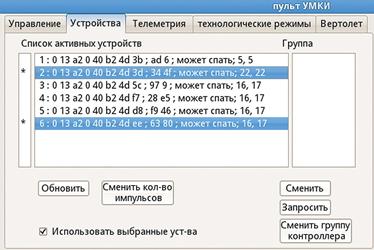
Рис. 9. 12. Выбор устройств
ную цифровую лабораторию. Такую возможность, как правило, исполь- зуют там, куда человеку сложно или опасно добираться. Например, в космосе, или на пожаре, или на таких производствах, где людям следу- ет находиться как можно меньше времени.
 Полезная информация
Полезная информация
Среда управления учебным исполнителем Робот.
• Кумир (Комплект Учебных МИРов) — свободно распространяемая кросс-платформенная русскоязычная система программирования, предназначенная для начального обучения основам алгоритмиза- ции.
|
|
|
• Система программирования Кумир основана на методике, разрабо-
танной под руководством академика А. П. Ершова. В системе Ку- мир используется школьный алгоритмический язык с русской лек- сикой и встроенными командами управления программными ис- полнителями (Робот, Чертёжник, Кузнечик, Черепаха).
• Скачать программу можно на сайте разработчиков программы Ку-
мир (http: //lpm. org. ru/kumir2/), на официальном сайте проекта (http: //www. niisi. ru/kumir/), на сайте разработчиков роботов УМКИ (http: //www. umkikit. ru/).

Рис. 9. 13. Окно среды Кумир
• После загрузки среды Кумир на экране можно увидеть следующее окно (рис. 9. 13):
• Окно разбито на две основные области: рабочую область (вверху) и область ввода-вывода (внизу). В рабочей области располагается программа, с которой работает система Кумир.
• Рабочая область делится на две части: область программы (слева) и область сообщений (справа), в которую при подготовке програм- мы выводятся сообщения об ошибках, найденных в каждой строке, а при выполнении — сведения о значениях переменных, присваива- емых в строке.
• Для работы программы исполнителя Робот необходимо снять знак комментария перед командой выбора исполнителя (удалить верти- кальную черту перед командой «использовать Робот») (рис. 9. 14).
• Исполнитель Робот обитает в прямоугольном поле, разбитом на клетки, между которыми могут располагаться стены. Робот может передвигаться по полю и закрашивать клетки.
• Базовые команды перемещения для исполнителя Робот: вверх, вниз, влево, вправо. При выполнении этих команд робот переме- щается на одну клетку соответственно команде: вверх, вниз, влево, вправо. По команде «Закрасить» закрашивается клетка, в которой робот находится в настоящий момент.
|
|
|
