 |


§ 53. Управление работой контроллера
|
|
|
|
326

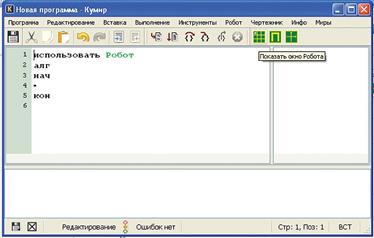
Рис. 9. 14. Подготовка робота к работе
• С помощью списка команд меню «Выполнение» (рис. 9. 15) можно регулировать работу созданных алгоритмов в различных режимах.
• «Выполнить непрерывно» — непрерывное выполнение программы без остановок между шагами.
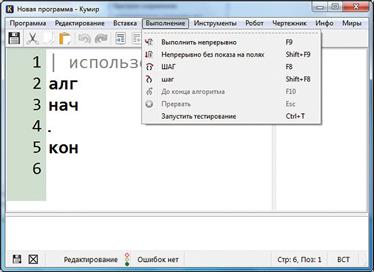 |
Рис. 9. 15. Список команд меню «Выполнение»

Рис. 9. 16. Справочная система Кумир
• «ШАГ» — выполняется один шаг программы. Для выполнения сле- дующей команды необходимо снова дать команду ШАГ.
• О работе в программе Кумир можно прочитать в справочной систе- ме Кумир, вкладка «Инфо», пункт «Язык и система Кумир» (рис. 9. 16) или в Интернете.
 |
? Вопросы и задания
1. Какие режимы управления роботом вы знаете? 2. Что может быть пуль- том управления исполнителя? 3. В какой форме исполнитель-робот получает команды для выполнения? 4. Что необходимо знать для выбора одного устройства из многих в сети?
Задание 1
Проведите исследования по ручному управлению любым исполнителем с пульта управления (в случае отсутствия роботизированных платформ воз-
328
 можно использование нескольких радиоуправляемых игрушек): исследуйте реакцию на однократное нажатие кнопки движения, на угол поворота, на дальность действия от пульта управления.
можно использование нескольких радиоуправляемых игрушек): исследуйте реакцию на однократное нажатие кнопки движения, на угол поворота, на дальность действия от пульта управления.
 Задание 2
Задание 2
Проведите исследования по возможности запомнить выполненные команды и повторить их необходимое число раз.
Установите программу Кумир и разработайте несколько линейных алго- ритмов управления исполнителем Робот (управление движением вперёд, на- зад, поворотами).
 Задание 3
Задание 3
Сравните точность выполнения команд реального и виртуального робо- та (насколько точно выполняются повороты, насколько точно можно от- регулировать шаги и т. д. ). Сделайте выводы о различиях между реальным и виртуальным исполнителем. Предложите пути решения возникающих про- блем.
|
|
|
§ 53. Управление работой контроллера
 |
В предыдущих классах вы ознакомились с некоторыми электрон- ными устройствами (светодиодами, транзисторами и т. д. ), получили представление о программировании. Пришло время поработать с более сложным электронным конструктором. Теперь к контроллеру вы сами будете подключать различные компоненты (кнопки, датчики и т. д. ) и составлять программы на языке программирования.
В качестве контроллера будем использовать платформу Arduino Uno, которая состоит из двух основных частей — аппаратного обеспече- ния (непосредственно платы Arduino, рис. 9. 17) и программного обеспе- чения, которое запускается на компьютере.

 |  | ||
Рис. 9. 17. Плата Arduino
Основная деталь платы — это микроконтроллер, в который и будут записываться программные коды (скетчи).
Электрическое питание может быть подано на плату через USB- порт от компьютера или от источника питания. Источником питания может быть батарейка, аккумулятор или подключение в сеть через адап- тер. Главное, при подключении не перепутать плюс с минусом и учесть, что подключаемый источник должен давать напряжение в диапазоне от 3 до 12 В. Провода от батареи подключаются к выводам Gnd и Vin разъ- ёма питания. Плата может сама выбирать источник питания: если она подключена к компьютеру через USB- кабель и к разъёму питания под- ключён адаптер, то плата выберет адаптер.
Программное обеспечение представляет собой интегрированную среду Arduino IDE, которую можно бесплатно скачать на официальном сайте (https: //www. arduino. cc/en/Main/Donate).
В операционной системе Linux запуск программы осуществляется сразу, в системе Windows может потребоваться запуск от имени админи- стратора. Тогда правой кнопкой мыши следует открыть контекстное ме- ню и выбрать пункт «Запуск от имени администратора» (рис. 9. 18).
|
|
|
Когда программа запустится, откроется окно Arduino IDE (рис. 9. 19). Обратите внимание — вы ещё не подключали плату Arduino к компью- теру, а в правом нижнем углу уже присутствует надпись «Arduino Leonardo on COM4». Таким образом Arduino IDE сообщает вам, что она
|
|
|
