 |


Порядок выполнения работы.
|
|
|
|
1. Определение свойств объекта 2-го порядка по кривой разгона.
1.1. Открыть находящуюся на рабочем столе папку
«Лабораторная работа №2» двойным щелчком левой клавиши мыши.
1.2. Открыть таким же образом файл «objekt2» из папки
«Лабораторная работа №2». При этом автоматически запустится программа Matlab и в отдельном окне откроется модель объекта, состоящая из блоков и связей между ними (рис. 6.1).
1.3. Установить по указанию преподавателя следующие параметры: Кn – коэффициент передачи ОР по каналу возмущающего воздействия; Т1, Т2 – постоянные времени ОР; Zapazdivanie – время запаздывания;
1.4. Запустить моделирование нажатием на значок  на панели задач окна модели «objekt2». По
на панели задач окна модели «objekt2». По
окончании расчета в левом нижнем углу окна появится надпись «Готов».
 |
Рис. 6.1. Окно модели объекта «objekt2».
1.5.  Открыть блок «Scope» для просмотра графика, полученного в результате моделирования. Для выравнивания графика по масштабу нажать на панели задач окна на значок «Scope».
Открыть блок «Scope» для просмотра графика, полученного в результате моделирования. Для выравнивания графика по масштабу нажать на панели задач окна на значок «Scope».
1.6. Активировать окно Matlab для просмотра таблицы результатов расчета и в рабочей области окна (рис. 6.2) двойным щелчком левой клавиши мыши по значку
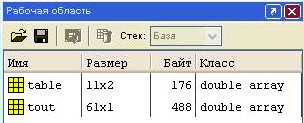 |
«table2» открыть таблицу в новом окне.
Рис.6.2. Рабочая область окна Matlab.
1.7. Записать значения выходной величины объекта и времени для дальнейшего построения кривой разгона в таблицу 6.1.
1.8. Закрыть все окна (без сохранения изменений) нажатием на крестик в правом верхнем углу окон.
Таблица 6.1. Кривая разгона ОР.
| Время, с | |||||||||||||||
| Хвых | |||||||||||||||
| Время, с | |||||||||||||||
| Хвых |
|
|
|
1.9. Построить по данным табл. 6.1 кривую разгона ОР, выполнить ее аппроксимацию и определить свойства объекта регулирования. Полученные данные занести в табл. 6.2.
1.10. Рассчитать параметры настройки автоматического регулятора (ПИ или ПИД, по указанию преподавателя),
 используя приведенные в литературе формулы или номограммы и найденные в п.1.9 свойства объекта регулирования. Полученные данные занести в таблицу 6.2.
используя приведенные в литературе формулы или номограммы и найденные в п.1.9 свойства объекта регулирования. Полученные данные занести в таблицу 6.2.
|
t, c
Кривая разгона ОР
Таблица 6.2. Свойства объекта 2-го порядка и параметры настройки регулятора.
| Объект регулирования | Тип переходного процесса в АСР | Автомати- ческий регулятор | |||||||||
| Установленные значения | Рассчитан- ные значения | ||||||||||
| kp | Ти | Тд | |||||||||

| Т1 | Т2 | k0 |
| Т0 | k0 | |||||
2. Нахождение кривых переходных процессов.
2.1. Открыть находящуюся на рабочем столе папку
«Лабораторная работа №2».
2.2. Открыть файл «sistem2» из папки «Лабораторная работа
№2». При этом автоматически запустится программа
Matlab и в отдельном окне откроется модель системы, состоящая из блоков и связей между ними (рис. 6.3). Данная модель представляет собой модель объекта и модель системы (объект с регулятором) с выводом результатов симуляции на один график.
2.3. Установить параметры ОР и АР, найденные в первой части работы. Установить значения следующих параметров: Кn1 = Кn2 – коэффициент передачи ОР по каналу возму- щающего воздействия; Т1 = Т3 и Т2 = Т4
|
|
|
– постоянные времени объекта; Zapazdivanie 1 = Zapazdivanie 2 – время запаздывания объекта; Ko – коэффициент передачи ОР по каналу управляющего воздействия; Kp – коэффициент усиления регулятора; Tu
– время интегрирования; T д – время дифференцирования (если при расчете был взят ПИ-регулятор, то T д = 0).
2.4. Запустить моделирование (см. п. 1.4). По окончании расчета в левом нижнем углу окна появится надпись
«Готов».
2.5.
 |
Открыть блок «Scope» для просмотра графиков, полученных в результате расчета и выровнять полученный график по масштабу (см. п. 1.5.).
Рис. 6.3. Окно модели «sistem2».
2.5. Открыть блок «Scope» для просмотра полученного графика и выровнять полученный график по масштабу (см. п. 1.5.).
2.6. Активировать окно Matlab для просмотра таблицы результатов расчета и в рабочей области окна (рис.6.2) двойным щелчком левой клавиши мыши по значку
«table21» открыть таблицу в новом окне.
2.7. Выписать значения выходной величины системы и времени для дальнейшего построения графика и занести их в табл.6.3.
2.8. Повторить работу по пп. 2.3 – 2.7, задаваясь различными значениями параметров настройки регулятора.
2.9. Закрыть все окна (без сохранения изменений!!!).
2.10. Построить по полученным в пп. 2.7 – 2.8 данным кривые переходных процессов системы регулирования и определить показатели качества переходных процессов. Полученные результаты занести в таблицу 6.4.
Таблица 6.3. Кривые переходных процессов АСР.
| Время, с | |||||||||||||||||
| Хвых | |||||||||||||||||
| Время, с | |||||||||||||||||
| Хвых | |||||||||||||||||
| Время, с | |||||||||||||||||
| Хвых | |||||||||||||||||
| Время, с | |||||||||||||||||
| Хвых | |||||||||||||||||
| Время, с | |||||||||||||||||
| Хвых | |||||||||||||||||
| Время, с | |||||||||||||||||
| Хвых |
|
|
|
Таблица 6.4. Показатели качества переходных процессов в модели одноконтурной АСР.
| Параметры настройки регулятора | Показатели качества переходного процесса | ||||||
| Коэффициент передачи Кр | Время интег- рирования Ти | Время дифференци- рования Тд | Динамическая ошибка | Статическая ошибка | Время регулирования | Перерегули- рование | Интегральная квадратичная ошибка |

|
c
Кривые переходных процессов АСР
Лабораторная работа КЭП.
ИЗУЧЕНИЕ И НАСТРОЙКА КОМАНДНЫХ ПРИБОРОВ
Цель работы. Ознакомиться с устройством командных приборов. Приобрести навыки настройки каналов управ- ления.
Командные приборы предназначены для управления во времени последовательностью и продолжительностью различных операций в технологических процессах посредством включения или выключения электрических или пневматических цепей по заранее заданной программе. Командные приборы делят на приборы с механической контроллерной и компьютерной системами формирования команд. К наиболее распространенным командным приборам относятся:
- командный электропневматический прибор КЭП-12У. (Рис.7.1) с механической системой формирования команд на включение или выключение до 12 электрических или пневматических цепей. Прибор состоит из синхронного электродвигателя 2. приводящего во вращение распределительный вал 3 через редуктор 7, имеющий 127 ступеней скорости. Настройка времени срабатывания цепей управления осуществляется перемещением кулачков 4 в пазах распределительного вала 3. Управление прибором ручное или дистанционное кнопками Пуск и Стоп. Продолжительность цикла от 30 сек до 18 часов. Точность установки времени цикла +2,5%. Время цикла настраивается с помощью колокола 1 и скользящей шестерни 6.
- командный электрический прибор КЭП-12м (Рис.7.2) с микропроцессорным управлением выходными каналами. Управление осуществляется по циклограмме или по встроенным в прибор часам реального времени. Количество независимо управляемых каналов - 12. Диапазон установки времени циклов от 0 до 24 часов. Точность хода часов не
хуже 2 с/сут. Дискретность установки значений времени -1 с. Управление прибором ручное или дистанционное кнопками Пуск/Стоп/Пауза. Настройка времени срабатывания цепей управления осуществляется кнопками 4, расположенными на передней панели прибора, и контролируется по информационным табло 1 и светодиодным индикаторам 3.

Рис. 7.1. Командный электропневматический прибор КЭП-12У:
1 – колокол, 2 – синхронный двигатель, 3 – распределительный вал, 4 – блок кулачков и защелок, 5 – путевые выключатели или пневматические золотники, 6 – скользящая шестерня,
 |
7 – коробка передач.
Рис. 7.2. Командный электрический прибор КЭП-12м:
1 – информационное табло, 2 – клеммы для подключения цепей управления, 3 – светодиодные индикаторы состояния цепей управления, 4 – кнопки для включения и настройки прибора.
В настоящее время командные приборы КЭП-12У и КЭП-12м с ограниченным числом выходных каналов и
алгоритмов управления используются лишь на небольших, как правило автономных, технологических установках. На смену им приходят контроллерные и компьютерные рабочие станции АСУ ТП, программируемые и управляемые с помощью систем диспетчерского управления и сбора данных (SCADA-систем) и базирующиеся на модульных устройствах ввода-вывода. Это позволяет практически без ограничений увеличивать количество каналов управления и задавать любые условия их включения и выключения. Например, в применяемой в настоящей лабораторной работе компьютерной рабочей станции АСУ ТП при создании командного прибора, аналогичного КЭП-12м, число каналов управления может быть доведено до 500 шт., а общее время цикла до 1000 суток.
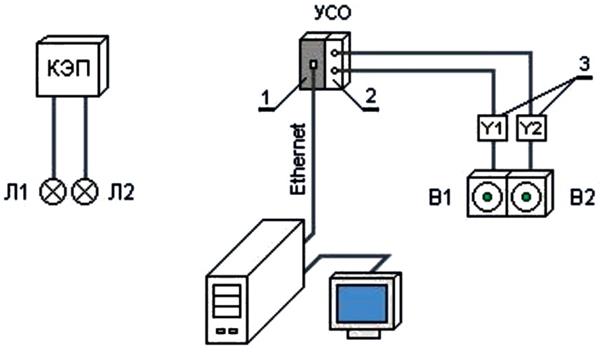 |
Схема компьютерной рабочей станции АСУТП с устройством связи с объектом, работающим по сети "Ethernet", приведена на рис. 7.3.
Рис. 7.3. Структурная схема лабораторной установки:
1 – коммутационный модуль, 2 – модуль дискретного вывода, 3 – исполнительные механизмы, Л1, Л2 – сигнальные лампы, В1, В2 – вентиляторы.
Управляющие сигналы формируются непосредственно в системном блоке компьютера и поступают на исполнительные механизмы Y1 и Y2 через активный коммутационный модуль 1 и модуль дискретного вывода 2.
В качестве программного обеспечения используется система диспетчерского управления и сбора данных "РСК- 2007". В контроллерных рабочих станциях АСУТП вместо пассивных устанавливают активные коммутационные модули (контроллеры), работающие со своим программным обеспечением. Компьютер в этом случае применяется для считывания данных с активных модулей и для внесения корректировок в их работу.
Настройка и контроль работы каналов управления в командном приборе, созданном в SCADA-системе "РСК- 2007", ведется по таблице 7.1.
Настройка командного электропневматического прибора КЭП-12У выполняется по инструкции завода изготовителя и контролируется по секундомеру и сигнальным лампам Л1 и Л2. Общее время цикла работы и время включения и выключения каналов управления устанавливаются по указанию преподавателя.
Таблица 7.1. Контроль работы командного прибора, созданного в SCADA-системе «РСК-2007».
Общее время цикла
| Венти- лятор | Время работы вентилятора | Погрешности |
|
|
|
