 |


Белорусский национальный технический университет
|
|
|
|
Кафедра «Детали машин, ПТМ и М»
Лабораторная работа № 3
УПРУГОЕ СКОЛЬЖЕНИЕ
ВО ФРИКЦИОННОЙ ПЕРЕДАЧЕ
Цель работы: 1. Исследование кинематики лобовой фрикционной
передачи.
2. Построение графика зависимости ε = f (Т 2).
Работу выполнил: Ф.И.О.
группа
Работу принял:
Минск ____
Схема лобового фрикционного вариатора
| R 2 = 27,5 мм |
| R 1min = 5 мм |
| R 1max = 75 мм |
Таблица 3.1
Данные опытов и расчетов
Диск
| Т 2, Н∙мм | Число импульсов вала электродвига-теля z дв | Частота вращения диска

| Число импульсов ролика z p | Частота
вращения
ролика
| Коэффициент упругого скольжения

|
График 
ε
Т 2, Н·мм
Контрольные вопросы
1. Чем вызывается упругое скольжение во фрикционной передаче? В чем его отличие от геометрического скольжения?
2. Каковы отрицательные последствия упругого скольжения?
3. Каковы способы понижения упругого скольжения?
Лабораторная работа № 4
ИЗУЧЕНИЕ РАБОТЫ РЕМЕННОЙ ПЕРЕДАЧИ
Цель работы
1. Построение графика зависимости  .
.
2. Определение КПД передачи и построение графика зависимости  .
.
Основные правила по технике безопасности
1. Заданное предварительное натяжение ремня создавать в присутствии преподавателя.
2. По окончании опыта установку отключить от сети
Общие сведения
Характерной особенностью работы ременной передачи является неизбежное упругое скольжение, в результате которого скорость ведомого шкива отстает от скорости ведущего, происходят нагревание и износ ремня, понижается КПД передачи.
|
|
|
Упругое скольжение зависит от типа и материала ремней, величины силы предварительного натяжения и передаваемой нагрузки.
Для определения предварительного натяжения F 0 воспользуемся условием равновесия  (рис. 4.1):
(рис. 4.1):

Отсюда

Здесь l = 60 мм; l 1 = 150 мм.
| l |
| l 1 |
| D 2 |
| D 1 |
| F 0 |
| F 0 |

Рис. 4.1. Схема передачи и нагрузочного устройства
Из рис. 4.1
 ,
,
где γ – угол наклона ветвей ремня к межосевой линии;
D 1, D 2 – диаметры ведущего и ведомого шкивов, D 1равно 65 и 30 мм, D 2 равно 65 и 90 мм;
F – сила тяжести на нагружателе, Н;
a = 260…290 мм – межосевое расстояние.
Коэффициент упругого скольжения при определенных значениях F 0 передаваемой нагрузки T 2 определяется по уравнению
 . (4.1)
. (4.1)
Коэффициент полезного действия передачи определяется по уравнению
 ,
,
где Т 1 − момент на ведущем шкиве, Н∙мм;
T 2 − момент на ведомом шкиве, Н∙мм;
n 1, n 2 – частоты вращения ведущего и ведомого шкивов, мин–1.
Описание установки
Опыт выполняется на установке ДП 2К (рис. 4.2).
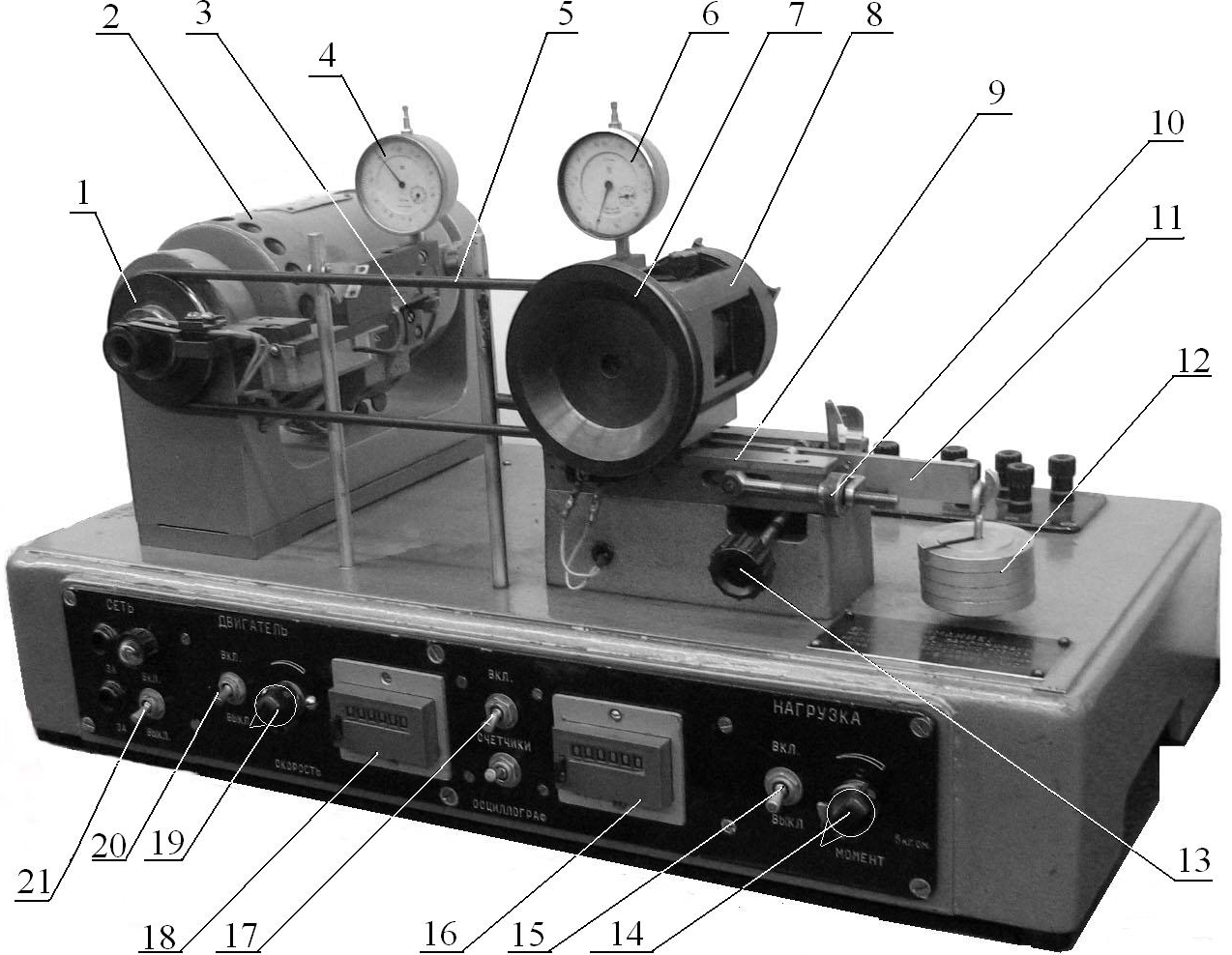
Рис. 4.2. установка ДП2К:
1 – шкив ведущий; 2 – электродвигатель; 3 – пружина пластинчатая; 4, 6 – индикаторы;
5 – ремень круглый; 7 – шкив ведомый; 8 – порошковый тормоз; 9 – ползун; 10 – винт перемещения ползуна; 11 – рычаг; 12 – грузы; 13 – винт фиксации ползуна; 14 – ручка регулирования нагрузки; 15 – тумблер включения нагрузочного устройства; 16 – счетчик частоты вращения ведомого шкива; 17 – тумблер включения счётчиков; 18 – счетчик частоты вращения ведущего шкива; 19 – ручка регулирования частоты вращения
электродвигателя; 20 – тумблер включения электродвигателя; 21 – тумблер включения сети
Установка состоит из балансирного электродвигателя 2, нагрузочного устройства 8 и устройства для создания предварительного натяжения ремня 5. На литом основании установлен кронштейн, на котором балансирно в шарикоподшипниках установлен корпус электродвигателя 2. На валу электродвигателя установлен ведущий двухступенчатый шкив 1. Момент, развиваемый электродвигателем, измеряется индикатором 4 через деформацию пружины 3.
|
|
|
В верхней части подставки в направляющих установлен ползун 9.
В ползун вмонтирована ось, на которой шарнирно установлен корпус, к которому крепится нагрузочное устройство, вал которого сочленяется с валом двухступенчатого ведомого шкива 7. К корпусу крепится рычаг 11. При помощи грузов 12 создается момент относительно оси в ползуне,
в результате чего корпус вместе с валом ведомого шкива может перемещаться в направлении от ведущего шкива, создавая тем самым дополнительное натяжение ремня. При помощи винта 10 производится перемещение ползуна 9 с корпусом, создавая предварительное натяжение ремня. Ручкой 13 ползун фиксируется при выбранном натяжении ремня.
Величина нагрузочного момента измеряется через деформацию пружины индикатором 6.
Порядок выполнения работы
1. Создать заданное предварительное натяжение ремня, подвесив определенный груз 12 к рычагу 11, после чего ручкой 10 рычаг должен быть установлен в горизонтальное положение, которое определяется по совмещению меток на рычаге и ползуне.
2. Застопорить ползун ручкой 13.
3. Включить установку в сеть.
4. Тумблером 21 (см. рис. 4.2) включить питание прибора и тумблером 20 включить электродвигатель.
5. Ручкой 19 по счетчику частот 18 вращения ведущего шкива установить скорость вращения электродвигателя (примерно n 1= 1100 мин–1) и не менять ее в течение всего опыта.
6. Включить нагрузочное устройство тумблером 15, ручка 14 при этом находится в крайнем левом положении (Т 2 = 0).
7. Настроить индикаторы 4 и 6 (см. рис. 4.2) на нулевую отметку шкалы (при работающем электродвигателе).
8. Нажатием кнопок установить показания счетчиков частот вращения 16 и 18 на нуль.
9. При моменте Т 2 = 0 включить счетчики 16 и 18 тумблером 17 на одну минуту. Показания счетчиков записать в табл. 4.1 отчета.
10. Повторить действия, указанные в пунктах 8 и 9, для нагрузок 10, 15, 20, 25, 30, 35, 40 делений индикатора. Момент, развиваемый электродвигателем, измеряется индикатором 4. При тарировке индикаторов 4 и 6 с помощью тарировочного приспособления получены коэффициенты соответственно
|
|
|
 ;
;  .
.
11. Данные измерения заносятся в табл. 4.1 отчета.
12. Построить графики зависимости εи η от нагрузки T 2.
Образец оформления отчета
|
|
|
