 |


Изучение цифровых систем управления технологическим оборудованием
|
|
|
|
Литература
1. Пневматические устройства и системы в машиностроении. Справочник/ Е. В. Герц, А. И. Кудрявцев, О. В. Ложкин и др. – М.: Машиностроение, 1981. – 408 с.
2. Лазарев, В. Г., Пийль, Е. И. Синтез управляющих автоматов. – М.: Энергия, 1970. – 400 с.
3. Пупырев, Е. И. Перестраиваемые автоматы и микропроцессорные системы. – М.: Наука, 1984.
4. Теория автоматического управления: Учеб. для машиностроит. спец. вузов/ В. Н. Брюханов, М. Г. Косов, С. П. Протопопов и др.; Под ред. Ю. М. Соломенцева. – М.: Высшая школа, 2003. – 268 с.
Лабораторная работа № 6
ИЗУЧЕНИЕ ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ
Цель работы: изучение основных принципов управления внешними устройствами от ЭВМ, изучение принципов построения систем цифрового управления технологическим оборудованием.
Оборудование и принадлежности к работе
1. Лабораторный макет – 1шт.
2. Персональный компьютер – 1шт.
Основные положения
В настоящее время широко используются системы управления различным технологическим оборудованием на основе промышленных контроллеров и ЭВМ в специальном промышленном исполнении (на основе одноплатных компьютеров форм-фактора PC/104, PC/104+, MicroPC, EBX и др. ). В таких системах различные исполнительные устройства управляются с помощью цифровых сигналов. Для коммутации мощных цепей питания исполнительных устройств используют ключи различных типов – транзисторные, тиристорные, реле и т. д.
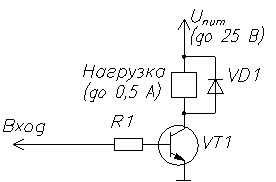
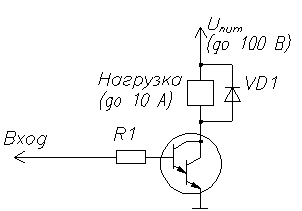
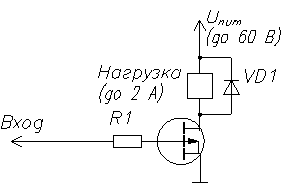
Наиболее простой способ управления нагрузкой – использование транзисторных ключей, как показано на рисунке 6. 1 [1]. При необходимости гальванической развязки между цепью управления и нагрузкой можно использовать оптопару, как показано на рисунке 6. 2 [1]. Транзисторные ключи позволяют управлять нагрузкой, потребляющей ток до 10 А при напряжении до 100 В. Если в качестве нагрузки используется катушка реле, то такой комбинацией можно коммутировать нагрузку практически с любыми параметрами питания. В схемах на рисунке 1 предполагается, что нагрузка является индуктивной (например, та же катушка реле или обмотка двигателя), поэтому параллельно с ней во встречном к питанию направлении включается диод VD1. Его функция – «закорачивание» возникающей при срабатывании ключа ЭДС самоиндукции для защиты транзистора от возможного выхода из строя.
|
|
|
а
б
в
Рисунок 6. 1 – Управление нагрузкой: а) на биполярном транзисторе; б) на составном транзисторе (Дарлингтона); в) на полевом транзисторе
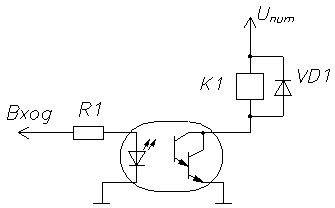
Рисунок 6. 2 – Схема управления нагрузкой (реле) с помощью оптопары
Резистор R1 служит для задания требуемого тока базы транзистора. Его величина выбирается следующим образом. Если нагрузка потребляет ток Iн, а выходной ток схемы управления (порта контроллера) Iвых, то требуемый коэффициент усиления транзистора по току
h21Э = Iвых / Iн.
По полученному коэффициенту усиления, току коллектора и напряжению питания нагрузки (Uпит на рисунке 6. 1 – напряжение между коллектором и эмиттером) выбирается транзистор. Затем с учетом падения напряжения на базовом переходе транзистора Uб = 0, 7 В определяется R1:
R1 = (U1 – Uб)/Iвых,
где U1 – напряжение, соответствующее логической единице на управляющем выходе контроллера, обычно 2, 4…5 В.
Например, требуется коммутировать от параллельного порта компьютера (Iвых = 5 мА) нагрузку в виде реле РЭС-9 с напряжением питания катушки Uпит = 12 В и потребляемым током Iн = 80 мА. Требуемый коэффициент усиления транзистора
|
|
|
h21Э = 80 / 5 = 16.
В данном случае подходит практически любой маломощный транзистор, например КТ315. Значение токоограничивающего резистора:
R1 = (2, 4 – 0, 7)/0, 005 = 340 Ом.
Ближайшее большее стандартное значение 470 Ом, что и выбираем.
Из устройств ввода наиболее широко в системах промышленной автоматики используются различные дискретные датчики – кнопки и клавиши, конечные выключатели контактного и бесконтактного типов (фотоэлектрические, индуктивные и др. ) Бесконтактные датчики, как правило, имеют на выходе стандартный цифровой сигнал и подключаются к входам контроллера или компьютера напрямую (рисунок 6. 3). При срабатывании датчика S1 вход микроконтроллера закорачивается на землю, и уровень сигнала меняется с высокого уровня (+5 В) на низкий (0 В). Резистор R1 в такой схеме служит для задания входного тока.
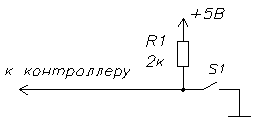
Рисунок 6. 3 – Подключение дискретного датчика к контроллеру
При срабатывании контактных устройств ввода возникает так называемый «дребезг контактов», то есть многократное замыкание и размыкание до момента окончательного срабатывания. Там, где это является существенным, применяют антидребезговые меры: подключают датчики через формирователи на триггерах Шмитта (это показано на рис. 6. 3) или используют специальные программы обработки сигнала от датчика. Триггеры Шмита также используют для формирования сигнала от оптических датчиков (оптопар).
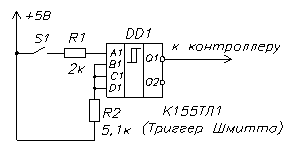
Рисунок 6. 4 – Антидребезговая схема на триггере Шмитта
Число входов и выходов контроллера или компьютера ограничено, поэтому при большом количестве устройств их подключают через дешифраторы, как показано на рисунке 6. 5 (три устройства управляются через транзисторные ключи и дешифратор двумя линиями микроконтроллера), или используют другие меры.
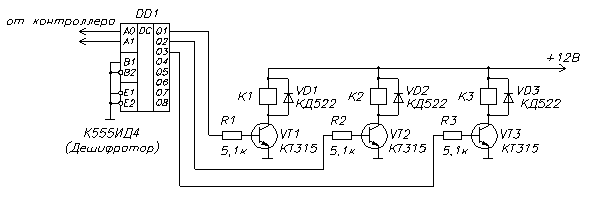
Рисунок 6. 5 – Управление с помощью дешифратора
|
|
|
