 |


Изучение релейных контактных и бесконтактных систем управления технологическим оборудованием
|
|
|
|
Вариант 3
В жидкостный термостат подается вода включением электромагнитного клапана. После достижения заданного уровня клапан отключается, и включается нагрев. После окончания нагрева нагреватель отключается, и включается клапан слива.
Вариант 4
Система автоматического регулирования температуры на основе электроконтактного термометра (см. часть 1, лабораторная работа № 3).
Вариант 5
Елочная гирлянда на 20 лампочек (каждая на 2, 5 В, 0, 5 А) четырех цветов. Должна отключаться после возгорания елки.
Вариант 6
Схема управления освещением. Свет должен включаться при закрытых окнах и дверях при наличии людей в помещении.
Лабораторная работа № 7
ИЗУЧЕНИЕ РЕЛЕЙНЫХ КОНТАКТНЫХ И БЕСКОНТАКТНЫХ СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ
Цель работы: изучение основных принципов построения систем управления технологическим оборудованием на основе реле и перехода от релейных контактных схем к бесконтактным.
Оборудование и принадлежности к работе
Лабораторный макет – 1шт.
Основные положения
Релейные контактные системы управления технологическим оборудованием используются уже много лет, благодаря неоспоримым преимуществам:
– простота схемы;
– возможность управлять большими токами и напряжениями с помощью относительно небольших управляющих сигналов;
– гальваническая развязка между цепями управления и нагрузки.
Однако в настоящее время сказываются недостатки таких систем:
– большие габариты управляющей части системы, связанные с большим количеством реле и их размерами;
|
|
|
– элементы релейной системы разнесены в пространстве (исполнительные устройства, шкаф с управляющей частью системы, пульт оператора), в связи с чем требуется большое количество соединительных проводов, это усложняет монтаж, обслуживание и ремонт системы;
– невысокая надежность контактных элементов, связанная с образованием электрической дуги при замыкании и размыкании контактов;
– переход на управление релейными элементами с помощью микроконтроллеров требует значительной перестройки схемы и введения дополнительных элементов, таких как транзисторные ключи для включения-выключения реле.
Поэтому в современных условиях является актуальным переход от релейных контактных к бесконтактным схемам на логических элементах. Это позволяет снизить габариты системы. Как правило, релейная контактная система занимает один или даже насколько шкафов, для которых требуется место, подвод питания с относительно высокой мощностью источника, так как большое количество катушек реле потребляют относительно большой ток. Сами шкафы должны иметь охлаждение в виде вентиляторов, в схему требуется водить искрогасящие элементы, демпферные выпрямительные столбы для борьбы с ЭДС самоиндукции, что еще больше увеличивает габариты. Система на бесконтактных элементах имеет меньшие габариты управляющей части, потребляет значительно меньшие токи и не требует дополнительных мер по повышению надежности. На рисунке 7. 1 показан пример управляющего шкафа релейной контактной системы и модернизированный вариант той же схемы на бесконтактных элементах с микропроцессорным управлением. По фотографиям видно, что габариты резко уменьшились (для сравнения: высота шкафа на рисунке а около 2 м, на рисунке б – около 0, 6 м), наибольшие размеры имеют элементы для коммутации управляемой нагрузки (реле и магнитные пускатели) и монтажные колодки. Еще больше габариты можно уменьшить с переходом на коммутацию цепей нагрузки современными транзисторными и тиристорными ключами, позволяющими переключать токи до 120 А.
|
|
|
 а
а
|  б
б
|
Рисунок 7. 1 – Управляющая часть релейной контактной системы (а) и вариант той же системы на бесконтактных элементах (б)
Схемы на бесконтактных элементах удобны для микропроцессорного управления, так как работают со стандартными цифровыми сигналами и легко подключаются к микроконтроллерам, микропроцессорным системам, промышленным компьютерам и контроллерам. В простых случаях все управляющие функции могут быть реализованы непосредственно контроллером, к входам-выходам которого подключаются датчики и элементы коммутации нагрузки (транзисторные ключи или их комбинации с реле). В более сложных системах для упрощения программы, по которой работает микроконтроллер, алгоритм работы системы (циклограмма) реализуется логической схемой, заменяющей релейную, а контроллер формирует сигналы управления, аналогичные нажатию кнопок на пульте оператора.
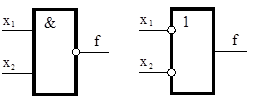
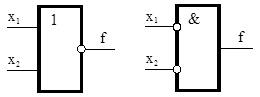
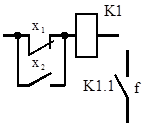
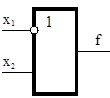
Проектирование бесконтактных систем управления связано как с созданием новых систем, так и с модернизацией существующих релейных. В последнем случае выполняется замена комбинаций реле и контактных элементов на соответствующие логические устройства. Соответствие между релейными схемами и логическими элементами иллюстрируется таблицей 7. 1
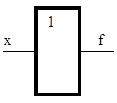
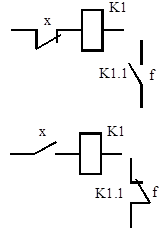
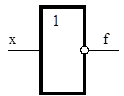
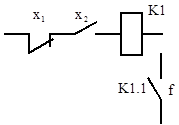
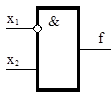
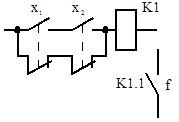
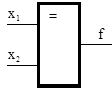
Таблица 7. 1 – Реализация и обозначение основных логических элементов
| Элемент, операция | Схема реализации | |
| На реле | На бесконтактных элементах | |
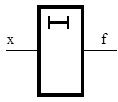
| Повторитель «ДА» f = x | 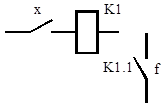
| 
|
Инвертор
«НЕ»

|
| 
|
| Конъюнктор «И» f = x1·x2 | 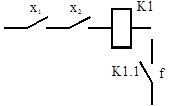
| 
|
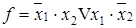
| Дизъюнктор «ИЛИ» f = x1Vx2 | 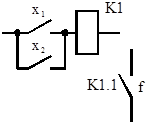
| 
|
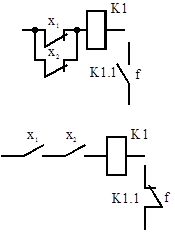
Элемент Шеффера
«И-НЕ»
 ; ;

| 
| 
|
Элемент Пирса
«ИЛИ-НЕ»
 ; ;

| 
| 
|
Импликатор

| 
| 
|
Запрет

| 
| 
|
Эквивалентность

| 
| 
|
Неэквивалентность
| 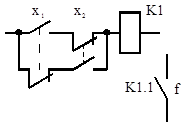
| 
|
| Триггер | 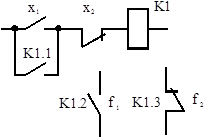
| 
|
| Элемент задержки | 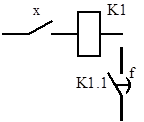
| 
|
При переходе от контактной схемы к бесконтактной фрагменты релейной системы заменяют логическими элементами. При этом следует учитывать, что мощность выходного сигнала логических элементов недостаточна для непосредственного управления нагрузкой, поэтому в схему добавляют усилители или транзисторные ключи. Для формирования цифрового сигнала на выходе дискретных датчиков используют формирователи (например, триггеры Шмитта).
|
|
|
Переход от контактной схемы к бесконтактной показан ниже на примере лабораторной установки.
Описание лабораторной установки
В лабораторном макете (схема показана на рисунке 7. 2) с помощью двух двигателей постоянного тока реализуется перемещение тележки сначала в одну сторону до замыкания первого конечного выключателя, затем движение в противоположную сторону до замыкания второго конечного выключателя и остановка.
При замыкании нормально открытых (н. о. ) контактов кнопки SB2 ток проходит через катушку реле К1 и включает его. Замыкаются н. о. контакты К1. 3 и включается двигатель M1 перемещения тележки влево. Двигатель питается постоянным током 115 В. При включении реле К1 параллельно контактам кнопки SB2 включаются контакты К1. 1, что позволяет отпустить кнопку SB2 без нарушения питания катушки реле К1.
Нормально закрытые (н. з. ) контакты К1. 2 при включении реле К1 размыкаются, что исключает возможность пуска двигателя обратного хода M2 при включенном двигателе M1.
В конце хода тележка нажимает упором на конечный выключатель SQ1 и размыкает н. з. контакт SQ1. 1 в цепи катушки реле К1, что приводит к выключению реле и разрыву контактов К1. 1 и К1. 3, кнопка SB2 больше не блокируется. Перемещение тележки после размыкания SQ1. 1 прекращается.
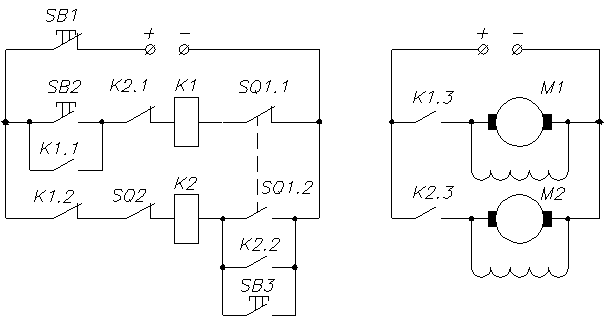
Рисунок 7. 2 – Схема лабораторной установки
Н. з. контакты K1. 2 при выключении реле K1 замыкаются, чем подготавливается цепь включения реле K2 двигателя обратного хода M2.
Одновременно с размыканием н. з. контактов SQ1. 1 включаются н. о. контакты этого же конечного выключателя – SQ1. 2 в цепи K2. Реле K2 получит питание через н. з. контакты K1. 2, н. з. контакты конечного выключателя SQ2 и н. о. контакты SQ1. 2.
Н. о. контакты K2. 3 включат двигатель обратного хода M2, контакты K2. 2 заблокируют н. о. контакты SQ1. 2, которые разомкнутся после начала движения тележки в обратном направлении.
|
|
|
Н. з. контакты K2. 2 разомкнутся, что исключает возможность включения K1, т. е. двигателя M1.
Когда тележка вернется в исходное положение, ее упором нажимается конечный выключатель SQ2 и его н. з. контакты размыкаются, реле K2 выключается, и его контакты K2. 3 выключают M2, разрываются блокирующие контакты K2. 1. Схема пришла в исходное положение.
В любой момент цикла тележка может быть остановлена нажатием на кнопку SB1 (" стоп" ). Продолжение движения тележки в одном из направлений производится нажатием на кнопки SB2 или SB3.
Бесконтактная схема той же установки показана на рисунке 7. 3. К ее входам SB1, SB2, SB3 могут подключаться кнопки или выходы порта микроконтроллера. Элементы K1, K1. 1 и К2, К2. 2 заменены соответственно триггерами DD2 и DD4, контакты К1. 2 и К2. 1 – элементами DD1. 4 и DD1. 1, элемент DD3 заменяет параллельное соединение конечного выключателя SQ1. 2 и кнопки SB3, элементы DD1. 2 и DD1. 3 предназначены для одновременного сброса триггеров в нулевое состояние сигналом SB1 в любой момент времени. Так как выходные логических элементов являются цифровыми, для коммутации двигателей М1 и М2 ключи на транзисторах VT1 и VT2. После завершения цикла триггеры должны быть сброшены в нулевое состояние сигналом SB1, после чего можно начинать следующий цикл.
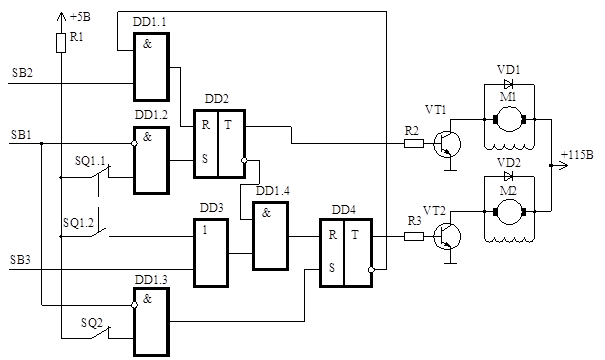
Рисунок 7. 3 – Реализация схемы лабораторной установки на бесконтактных элементах
В данном случае алгоритм работы схемы довольно простой, поэтому его можно реализовать программно с помощью микроконтроллера. В результате получим схему, показанную на рисунке 7. 4.
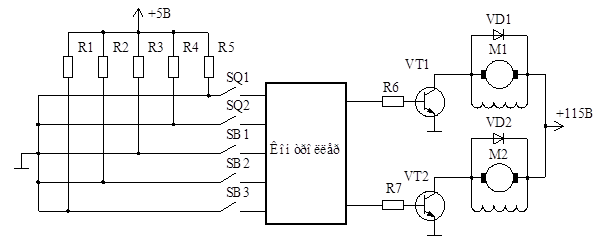
Рисунок 7. 4 – Схема с управлением от микроконтроллера
Чтобы использовать менее мощные и дорогие транзисторы, ту же схему можно выполнить на реле (рисунок 7. 5).
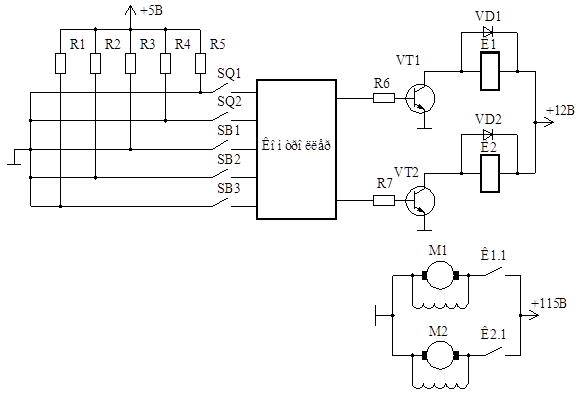
Рисунок 7. 5 – Релейная схема с управлением от микроконтроллера
Схема на рисунке 7. 3 называется схемой с жесткой логикой. По сравнению со схемами на контроллерах у таких систем выше быстродействие, они не требуют написания программы, однако при реализации сложного алгоритма они существенно дороже и не позволяют легко перепрограммировать цикл работы.
Выполнение работы
1. Включить питание лабораторной установки.
2. Запустить тележку кнопкой SB2 и дождаться окончания цикла.
3. Запустить тележку кнопкой SB2 и в процессе работы остановить ее кнопкой SB1, после чего запустить ее кнопкой SB2 и дождаться окончания цикла.
4. Запустить тележку кнопкой SB2 и в процессе работы остановить ее кнопкой SB1, после чего запустить ее кнопкой SB3 и дождаться окончания цикла.
|
|
|
5. Выполнить задание на переход от контактной схемы управления к бесконтактной с жесткой логикой по варианту, заданному преподавателем.
Содержание отчета
1. Исходная и разработанная схемы управления.
2. Описание работы разработанной бесконтактной системы управления.
Контрольные вопросы к лабораторной работе
1. В чем преимущества бесконтактных схем по сравнению с контактными?
2. Основные схемы реализации логических функций с помощью реле.
3. Изобразить циклограмму работы схемы управления тележкой (лабораторный макет).
4. Как реализовать схему управления электродвигателем от микроконтроллера?
Литература
Шаптала, А. Я., Старостин, И. А. Автоматическое управление процессами штамповки. – Л.: Машиностроение, 1975. – 256 с.
Лабораторная работа № 8
|
|
|
