 |


Глава 3 Горизонтальный полет вертолета
|
|
|
|
Глава 3 Горизонтальный полет вертолета
3. 1 Продольная и боковая балансировка вертолета в горизонтальном полете
Горизонтальный полет – это прямолинейный полет вертолета на постоянной высоте.
Установившимся горизонтальным полетом называется прямолинейный полет с постоянной скоростью при Н = const.
Если в процессе горизонтального полета скорость меняется по величине (разгон или торможение V), то полет будет неустановившимся.
Горизонтальный полет является основным режимом полета при выполнении любого полетного задания.
В горизонтальном полете (ГП) несущий винт работает в условиях косого обтекания (aф ± 90о), что позволяет ему создавать большую тягу, чем при осевом обтекании, при меньшей подводимой мощности к НВ.
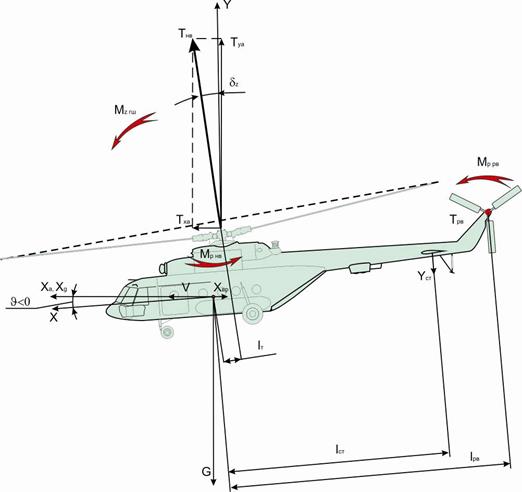
Рис. 69. Продольная балансировка вертолета в горизонтальном полете
Условие полного равновесия вертолета в ГП будет выглядеть:
Условие продольного равновесия:

| условие VГП = const; | (3. 1) |

| условие θ = 0; | (3. 2) |

| условие J = const. | (3. 3) |


Рис. 70. Боковая балансировка вертолета в горизонтальном полете
Условие бокового равновесия (см. рис. 70):

| условие VZ = 0; | (3. 4) |

| условие γ = 0; | (3. 5) |

| условие β = const; МК = const. | (3. 6) |
Вертолет в ГП балансируется с небольшим отрицательным углом тангажа, с левым скольжением без крена, либо с правым креном без скольжения (см. рис. 69, 70).
3. 2 Потребные тяга НВ и мощность для горизонтального полета
3. 2. 1 Располагаемая и потребная тяги НВ в горизонтальном полете
Под располагаемой тягой понимают максимально-возможную тягу несущего винта при работе двигателей на взлетном режиме (ТР).
Рассмотрим, от каких факторов она зависит.
|
|
|
На режиме висения ТР подсчитывается по формуле Н. Е. Жуковского в степени 2/3:
 . (3. 7)
. (3. 7)
При косом обтекании тягу НВ можно найти из формул:
 ; (3. 8)
; (3. 8)
 (3. 9)
(3. 9)
Проанализировав эти три уравнения, можно сделать вывод, что величина располагаемой тяги зависит от скорости полета, мощности двигателей, высоты полета и угла атаки (А) несущего винта.
Изменение ТР в зависимости от Nе показанном на рисунке 71.
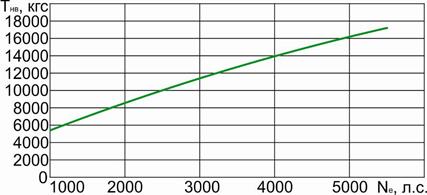
Рис. 71. Зависимость Тр от мощности силовой установки (Nе)
Если полагать, что Nподв. , Нпол, А не изменяются с ростом скорости полета, то ТРнв = f (V).
С увеличением скорости полета ТР возрастает и становится больше ТР на висении, что объясняется увеличением массового секундного расхода воздуха через ометаемую несущим винтом поверхность.
Максимального значения ТР достигает при V = 120 – 130 км/ч. Дальнейший рост скорости приводит к уменьшению ТР из-за расширения зоны обратного обтекания и срыва потока на отступающих лопастях, возникновения сверхзвуковых зон на наступающих лопастях.
С увеличением высоты полета, температуры наружного воздуха ТР уменьшается во всем диапазоне скоростей из-за уменьшения плотности воздуха, а следовательно, и мощности силовой установки.
Учитывая изменение Тр в зависимости от мощности силовой установки, а также от скорости полета можно построить график зависимости ТРнв = f (V).
Величина ТР не зависит от взлетного веса вертолета. В процессе полета летчику не всегда приходится использовать взлетную мощность двигателей (т. е. ТР), так как полет на взлетной мощности разрешается выполнять в течение 6 минут и не более, после чего необходимо уменьшить режим работы силовой установки. В этом случае несущий винт будет создавать тягу меньшую, чем ТР при jОШ = jОШвзл.
|
|
|


Рис. 72. Тяга потребная и тяга располагаемая в ГП
Вводится понятие потребной тяги НВ (ТГП). Это тяга, которая требуется для выполнения полета на заданной скорости при определенных условиях. Она определяется на основании известных величин ТУ, ТХ, ТZ:
 . (3. 10)
. (3. 10)
Учитывая, что ТХа = Хвр, ТУа = G, ТРВ = ТZа, выражение запишется в виде:
 . (3. 11)
. (3. 11)
Для простоты рассуждений, изменением ТРВ по скорости пренебрегаем, тогда:
 , (3. 12)
, (3. 12)
так как Хвр = f (V), то ТГП = f (G, V).
На режиме висения (V = 0) → ТГП = Твис = G.
С увеличением скорости полета потребная тяга растет пропорционально V 2 (рис. 72). Чем больше GВЗЛ, тем больше ТГП.
С изменением высоты полета (при Vпол = const) потребная тяга практически не изменяется, так как уменьшение плотности с увеличением Нпол компенсируется увеличением общего шага НВ (рис. 73).

|
|
|
