 |


Техническая аттестационная документация.
|
|
|
|
Техническая аттестационная документация должна содержать следующие сведения о НСИ, особенностях его эксплуатации и поверки:
- наименование НСИ, в том числе сокращенное;
- назначение НСИ;
- принцип устройства и действия НСИ, в том числе способ получения информации, при необходимости чертежи, схемы и т.д.;
- технические характеристики, в том числе метрологические;
- комплектность;
- особые правила по технике безопасности;
- периодичность поверки;
- перечень метрологических характеристик, подлежащих определению при периодической поверке СИ;
- перечень образцовых СИ и вспомогательного оборудования, необходимых для проведения поверки;
- условия и способы определения метрологических характеристик поверяемого НСИ.
Образец технического аттестационного документа в форме руководства
 по эксплуатации НСИ.
по эксплуатации НСИ.
А К Т
поверки средств измерения (испытательного оборудования)
научного подразделения __________________________
Комиссия в составе:
Руководитель подразделения (Фамилия, Имя, Отчество)
Метролог подразделения (Фамилия, Имя, Отчество)
Мат. ответственный (Фамилия, Имя, Отчество)
Представитель ОСМ СГАУ (Фамилия, Имя, Отчество)
Составил(а) настоящий акт в том, что нижеперечисленные средства измерений (испытательное оборудование) изымаются из обращения с «___»_________ 20___ года и поверяется.
Указанные в таблице средства измерения (испытательное оборудование) подлежит ______________________________
(хранению, реализации, передаче, списанию)
| № п/п | Наименование СИ (ИО) | Тип, марка | Заводской (инвентарный) № | Год выпуска | Дата последней поверки (аттестации) |
|
|
|
Руководитель подразделения (подпись, расшифровка подписи, дата)
Метролог подразделения (подпись, расшифровка подписи, дата)
Мат. ответственный (подпись, расшифровка подписи, дата)
Представитель (подпись, расшифровка подписи, дата)
Тема 1.3 Выбор законов регулирования на объектах, расчет и установка параметров настройки регуляторов.
1.3.1. Автоматическая система управления и её элементы.
 Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления рис 1.64.
Автоматическое управление в технике, совокупность действий, направленных на поддержание или улучшение функционирования управляемого объекта без непосредственного участия человека в соответствии с заданной целью управления широко применяется во многих технических и биотехнических системах для выполнения операций, не осуществимых человеком в связи с необходимостью переработки большого количества информации в ограниченное время, для повышения производительности труда, качества и точности регулирования, освобождения человека от управления системами, функционирующими в условиях относительной недоступности или опасных для здоровья. Цель управления тем или иным образом связывается с изменением во времени регулируемой (управляемой) величины — выходной величины управляемого объекта. Для осуществления цели управления, с учётом особенностей управляемых объектов различной природы и специфики отдельных классов систем, организуется воздействие на управляющие органы объекта — управляющее воздействие. Оно предназначено также для компенсации эффекта внешних возмущающих воздействий, стремящихся нарушить требуемое поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления рис 1.64.
Рис.1.64. Система автоматического управления.
Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, контроль, наладка и т.д.) также могут быть автоматизированы. САУ функционирует в основном в составе производственного или какого-либо другого комплекса.
|
|
|
История техники насчитывает много ранних примеров конструкций, обладающих всеми отличительными чертами САУ (регулирование потока зерна на мельнице с т. н. «потряском», уровня воды в паровом котле машины Ползунова, 1765, и т. д.). Первой замкнутой САУ, получившей широкое техническое применение, была система автоматического регулирования с центробежным регулятором в паровой машине Уатта (1784). По мере совершенствования паровых машин, турбин и двигателей внутреннего сгорания всё более широко использовались различные механические регулирующие системы и устройства, достигшие значительного развития в конце 19 — начале 20 вв. Новый этап в А. у. характеризуется внедрением в системы регулирования и управления электронных элементов и устройств автоматики и телемеханики. Это обусловило появление высокоточных систем слежения и наведения, телеуправления и телеизмерения, системы автоматического контроля и коррекции. 50-е гг. 20 в. ознаменовались появлением сложных систем управления производственными процессами и промышленными комплексами на базе электронных управляющих вычислительных машин.
Разработка АСУ.
Факторы, определяющие необходимость системного подхода к разработке АСУ:
Многосвязность процессов и задач.
Необходимость обеспечения взаимодействия система различного уровня.
Большое количество случайных факторов.
Разнообразие критериев, использованных на различных уровнях.
Необходимость обеспечения информационной, программной и технической совместимости с др. системами.
Создание любой системы:
Выделение проблемы.
Определение цели функционирования систем.
Выбор и определение критериев для сравнения вариантов.
Формализация процессов и задач на математическом уровне.
Декомпозиция системы на подсистемы и компоненты рис 1.65.
Разработка компонент.
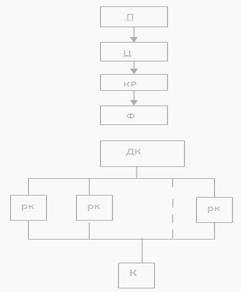
Рис.1.65. Композиция компонент.
Классический индуктивный подход состоит в строго последовательном выполнении всех этапов и простом суммировании компонент на этапе композиции. Такая разобщённость решения задач при разработке АСУ недопустима. Особенность системного подхода состоит в совместном и взаимосвязанном решении всех этапов разработки АСУ.
|
|
|
Принципы СП при разработке АСУ:
- зависимость и автономность;
- качественное различие целого и части;
- иерархичность исследования, при котором сама система исследуется как элемент более широкой системы;
- интеграция исследования, заключается в изучении общих свойств и закономерности систем;
- формализация исследования, т.е. получение количественных характеристик.
Исследование и разработка АСУ осуществляется в 2 этапа:
1.Макропроетирование.
2.Микропроектирование.
Макропроектирование рис.1.66.(цель создания, концептуальное и логическое проектирование) и микропроектирование (средства реализации системы, физическое проектирование).
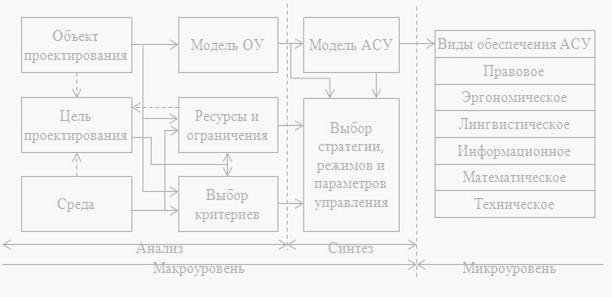
Рис.1.66. Блок-схема этапов проектирования.
Системный подход базируется на системном анализе, который включает следующие группы методов:
1. Эвристическое программирование – методы экспертных оценок, которые основаны на математическом обеспечении мнений группы экспертов.
2. Семиотический подход – употребление средств естественного языка для описания объектов и их свойств.
3. Аналитические методы – мат. методы теории исследования операций и ТПР.
4. Имитационное моделирование – средства исследования АС. Имитируется модель и деятельность системы.
ГОСТ 34.601-90 – определяет стандарты технологических стадий и этапов создания экономических информационных систем.
Стадия 1: Формирование требований к системе.
Стадия 2: Разработка концепции системы.
Стадия 3: Техническое задание.
Стадия 4: Эскизное проектирование.
Стадия 5: Технический проект.
Стадия 6: Рабочая документация.
Стадия 7: Ввод в действие.
Стадия 8: Сопровождение системы.
Стадия 0: Оценка реализуемости.
Стадия 1: Предпроектное обследование.
Стадия 2: Выбор варианта автоматизации.
|
|
|
Стадия 3: Разработка технического задания.
Стадия 4: Выбор варианта тех. реализации.
Стадия 5: Разработка проекта.
Стадия 6: Физическое проектирование.
1.3.3. Математическое описание автоматических систем управления мехатронных устройств и систем.
Математический аппарат анализа, разработанный для одноаспектного моделирования, входит составной частью в методики анализа мехатронных устройств. Однако требуются и развивающие дополнения, приводящие к инвариантности форм представления моделей разных физических объектов и, следовательно, к объединению моделей и их решению в едином вычислительном процессе.
Однако до настоящего времени методики многоаспектного моделирования почти не используются в существующих АСУ, хотя в средствах анализа систем с физически разнородными подсистемами нуждается большинство проектных организаций приборостроительного профиля.
Вначале статьи кратко изложены основы единообразного построения эквивалентных схем объектов в разных приложениях, далее рассмотрены вопросы построения математических моделей взаимодействия подсистем различной физической природы и проиллюстрированы возможности многоаспектного моделирования на примерах конкретных мехатронных устройств.
Эквивалентные схемы мехатронных устройств. Наличие аналогий фаэовых переменных и уравнений в разных приложениях позволяет создать единое математическое и программное обеспечение для АСУ объектов мехатроники.
Выделяются два типа уравнений, составляющих математические модели (ММ): уравнения, описывающие состояния элементов, так называемые компонентные, и уравнения, зависящие от конфигурации подсистемы, от способов соединения элементов друг с другом, так называемые топологические. Фазовые переменные, фигурирующие в этих уравнениях, также можно разделить на два типа: переменные типа потенциала и типа потока. Переменные типа потенциала 'соответствуют местам соединения (узлам, полюсам) элементов, переменные типа потока соответствуют двухполюсным элементам, представляемым в схемах в виде ветвей.
Выбор фазовых переменных для подсистем неоднозначен, так, например, для механической подсистемы в качестве фазовых переменных типа потенциала может быть выбрана либо скорость либо перемещение. Предлагаемый в таблице набор фазовых переменных нашел практическое применение в
известной программе анализа.
1.3.4. Характеристики объектов управления.
Управлением называется процесс целенаправленного воздействия на систему, обеспечивающий повышение ее организованности, достижение того или иного полезного эффекта. Любая система управления разделяется на управляющую и управляемую подсистемы. Связь от управляющей подсистемы к управляемой называется прямой связью. Противоположная понаправлению связь называется обратной. Понятие обратной связи является фундаментальным в технике, природе и обществе. Считается, что управление без обратной связи не эффективно,т. к. не обладает способностью к самовыявлению ошибок, формулировке проблем, не позволяет использовать возможности саморегулирования системы, а также опыт и знания специалистов. Обратная связь воздействует на систему.
|
|
|
Воздействие - есть средство изменения существующего состояния системы путем возбуждения силы, позволяющей это сделать. В правильно организованной системе регулирования отклонение параметров от нормы перерастает в обратную связь и инициирует процесс управления.
В системах регулирования, замкнутых по отклонению, регулирование начинается тогда, когда произошло какое-либо изменение регулируемого параметра. Это выглядит, как тушение пожара. Однако при таком регулировании учитываются любые возмущения, независимо от их природы, которые повлекли за собой изменение регулируемого параметра. Однако, регулируемый параметр обязательно отклонится от заданного параметра и время приведения его в порядок зависит от инерционности объекта. Что это такое?
В системах с регулированием по возмущению регулируемый параметр практически не отклоняется от заданного значения благодаря тому, что она компенсирует возмущение еще до того, как оно приведет к изменению регулируемого параметра. Однако, если таких возмущений несколько, то необходимо организовать несколько систем регулирования, на каждое возмущение. Если соединить эти системы, то можно получить идеальный вариант.
Все объекты управления можно поделить на:
- устойчивые - с самовыравниванием;
- неустойчивые - без самовыравнивания.
Каждый объект - это физический процесс или процессы, которые в общей ситуации поддаются описанию математическими формулами. Но есть несколько параметров у каждого объекта - этоустойчивость и инерционность.
|
|
|
