 |


24 исследование устойчивости вторым методом ляпунова
|
|
|
|
24 ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ ВТОРЫМ МЕТОДОМ ЛЯПУНОВА
Наиболее общие результаты по исследованию устойчивости систем высокого порядка, как линейных, так и нелинейных, стационарных и нестационарных могут быть получены по методу А. М. Ляпунова [3, 4, 15]. Первая публикация на русском языке метода относится к 1892 г. и перевод на французском языке в 1907 г. В США метод получил распространение в 1949 г., а в инженерной практике стал применяться после 1960 г.
При исследовании устойчивости прямым методом Ляпунова, именуемым также второй методой Ляпунова, предполагается использование непрерывной скалярной функции переменных состояния V(x) совместно с уравнениями состояния  где fi - нелинейные функции произвольного вида, удовлетворяющие условию
где fi - нелинейные функции произвольного вида, удовлетворяющие условию 
так как в установившемся состоянии все отклонения и их производные равны нулю. Чтобы исследовать устойчивость по Ляпунову, необходимо подобрать некоторую знакоопределенную функцию V(x) и вычислить производную по времени от этой функции W(x).
Функция V называется знакоопределенной в некоторой области, если она во всех точках этой области в окрестности начала координат сохраняет один и тот же знак и нигде не обращается в нуль, кроме начала координат.
Функция V называется знакопостоянной (полуопределенной), если она сохраняет один и тот же знак, но может обращаться в нуль не только в начале координат, но и в других точках данной области.
Функция V называется знакопеременной, если она в данной области вокруг начала координат может иметь разные знаки.
Любая функция
V(x) = V(x1, x2, ..., xn ), (10. 3)
тождественно обращающаяся в нуль при x1 = x2 =... = xn = 0, называется функцией Ляпунова, если в ней в качестве x1, x2, ..., xn взяты переменные, в которых записаны уравнения (10. 1) для этой системы.
|
|
|
24. ДИСКРЕТНЫЕ САУ И ОСОБЕННОСТИ ИХ МАТЕМАТИЧЕСКОГО ОПИСАНИЯ.
Дискретные САУ.
Система управления называется дискретной, если она содержит дискретный элемент. Элемент называется дискретным, если его выходной сигнал квантован по времени или по уровню. Говорят, что сигнал квантован по времени, если он представляет собой последовательность импульсов, и квантован по уровню, если он принимает дискретные значения, т. е. значения, кратные некоторой минимальной величине, называемой уровнем квантования или квантом.
Дискретные системы разделяются на импульсные, цифровые и релейные.
Система управления называется импульсной, если она содержит импульсный элемент — дискретный элемент, преобразующий непрерывный сигнал в импульсный, т. е. в последовательность импульсов. На выходе импульсного элемента сигнал квантован по времени.
Система управления называется цифровой, если она содержит цифровое устройство. На выходе цифрового устройства сигнал квантован по уровню и по времени.
Система управления называется релейной, если она содержит релейный элемент. Релейные системы управления являются существенно нелинейными. Они не подлежат обычной линеаризации.

Импульсом длительности  называется сигнал (физическая величина), который описывается функцией, не обращающейся в нуль только на некотором конечном интервале времени длительности . По форме различают прямоугольные, треугольные, синусоидальные (рис. 6. 1) и другие импульсы. Они характеризуются шириной (длительностью) и амплитудой (высотой) АИ. Последовательность импульсов, помимо указанных параметров, еще характеризуется периодом следования импульсов Т и относительной длительностью
называется сигнал (физическая величина), который описывается функцией, не обращающейся в нуль только на некотором конечном интервале времени длительности . По форме различают прямоугольные, треугольные, синусоидальные (рис. 6. 1) и другие импульсы. Они характеризуются шириной (длительностью) и амплитудой (высотой) АИ. Последовательность импульсов, помимо указанных параметров, еще характеризуется периодом следования импульсов Т и относительной длительностью 

В импульсном элементе происходит модуляция, т. е. в соответствии с входным сигналом изменяется один из параметров последовательности импульсов на выходе. В зависимости от того, какой параметр изменяется, различают амплитудно-импульсную модуляцию (АИМ), широтно-импульсную модуляцию (ШИМ) и другие. При АИМ изменяется амплитуда АИ, а при ШИМ — ширина (длительность) импульса. Импульсный элемент, осуществляющий амплитудно-импульсную модуляцию, называют АИМ-элементом, а импульсный элемент, осуществляющий широтно-импульсную модуляцию, называют ШИМ-элементом.
|
|
|
Импульсную систему управления, содержащую АИМ-элемент, называют АИМ-системой управления, а импульсную систему управления, содержащую ШИМ-элемент, называют ШИМ-системой управления.
Различают импульсную модуляцию 1-го и 2-го родов. При импульсной модуляции 1-го рода модулируемый параметр изменяется в соответствии со значениями входного (модулирующего) сигнала
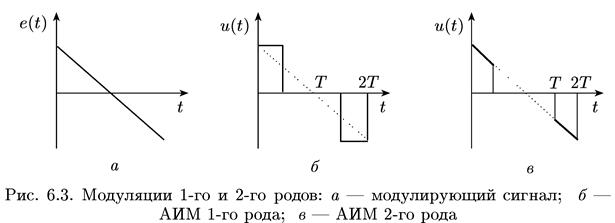
(рис. 6. 3, а) в дискретные моменты времени, называемые моментами съема сигнала (рис. 6. 3, 6).
При модуляции 2-го рода модулируемый параметр изменяется в соответствии со значениями модулирующего сигнала в течение всего времени существования импульса (рис. 6. 3, в).
|
|
|
