 |


2.4 Боковое равновесие. 2.4.1 Условия бокового равновесия. Рис. 52. Поперечное равновесие вертолета. Рис. 53. Поперечное равновесие вертолета с креном
|
|
|
|
2. 4 Боковое равновесие
2. 4. 1 Условия бокового равновесия
Под боковым равновесием вертолета понимают его равновесие в поперечном  и путевом
и путевом  отношении. Рассмотрим рисунок 52.
отношении. Рассмотрим рисунок 52.

Рис. 52. Поперечное равновесие вертолета
Условие бокового равновесия вертолета в поперечном отношении достигается при
 (2. 22)
(2. 22)
При условии γ = 0; β = 0,
 ; (2. 23)
; (2. 23)
 . (2. 24)
. (2. 24)
Так как УТ > hРВ, то ясно, что ТZа < ТРВ, следовательно:  < 0, т. е. вертолет начинает смещаться влево, в сторону действия силы ТРВ.
< 0, т. е. вертолет начинает смещаться влево, в сторону действия силы ТРВ.
Летчик добивается равновесия, создавая правый крен. В этом случае появляется составляющая силы тяжести G·sinγ, которая в сумме с ТZа уравновешивает ТРВ. Тогда выражение (2. 20) запишется в виде
 . (2. 25)
. (2. 25)

Рис. 53. Поперечное равновесие вертолета с креном
Таким образом, боковая балансировка с креном достигается как на режиме висения, так и в поступательном полете. Величина балансировочного угла крена для вертолета Ми-8 на режиме висения равна 2º – 2, 5º (рис. 53).
Тягу рулевого винта можно уравновесить и другим способом, создавая левое скольжение при γ = 0 (рис. 54). В этом случае возникает аэродинамическая сила фюзеляжа ZФ, которая в сумме с ТZ уравновешивает тягу рулевого винта. Выражение (2. 20) запишется в виде
 . (2. 26)
. (2. 26)
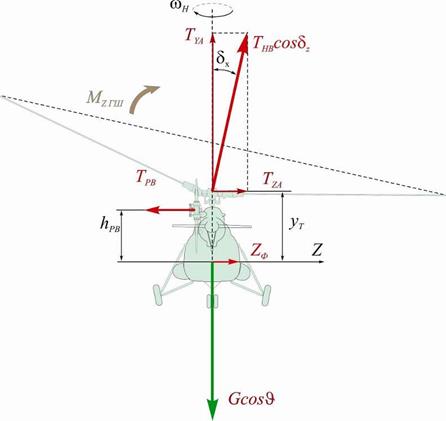
Рис. 54. Поперечное равновесие вертолета без крена (со скольжением)
В полете без крена под действием неуравновешенной силы появляется левое скольжение, а вместе с ним и боковая сила на фюзеляже Zф, дополняющая силу TZa для уравновешивания Трв.
|
|
|
При постоянном угле скольжения сила ZФ растет пропорционально квадрату скорости:
 . (2. 28)
. (2. 28)
Поэтому для сохранения поперечной балансировки с ростом скорости угол скольжения уменьшается.
Наименьший запас поперечного управления вправо будет на висении с правым ветром предельно допустимого значения 10 м/сек. Наименьший запас поперечного управления влево будет на режиме самовращения несущего винта на скорости
180 км/час.
Смещение центра массы к левому борту (заправка левого дополнительного топливного бака) уменьшает углы правого крена и левого скольжения.
Перед полетом на прием на борт людей и грузов лебедкой подъема грузов (ЛПГ) с режима висения предпочтительно заправлять правый дополнительный бак.
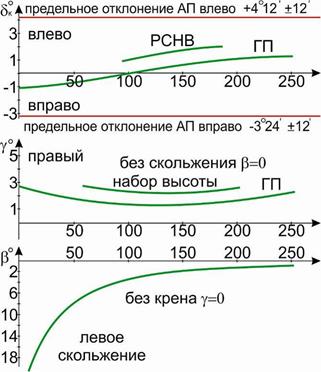
Рис. 55. Кривые поперечной балансировки вертолета МИ-8
Условия путевой балансировки:
 .
.
Ввиду малого значения путевых моментов ТZa хт и ZФ lZф ими можно пренебречь.
Путевая балансировка выполняется изменением силы тяги рулевого винта, т. е.
отклонениями педалей (изменением хода штока рулевого винта – XH).
Балансировочную кривую представляют в виде зависимости хода штока рулевого винта от скорости полета  , где К – коэффициент влияния скорости полета на тягу РВ. С увеличением скорости полета значение К увеличивается.
, где К – коэффициент влияния скорости полета на тягу РВ. С увеличением скорости полета значение К увеличивается.
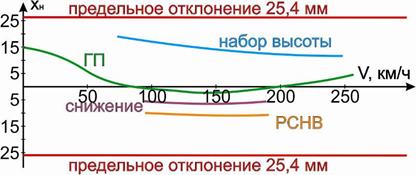
Рис. 56. Балансировочные изменения хода штока рулевого винта для различных режимов
Наибольшая величина хода штока рулевого винта, а следовательно, и правой педали вперед, имеет место на режиме висения, где потребная мощность подводится к рулевому винту наибольшая.
С переходом в горизонтальный полет и с ростом скорости полета потребная мощность уменьшается до скорости экономической, уменьшается и потребное балансировочное отклонение правой педали вперед (хода штока рулевого винта).
|
|
|
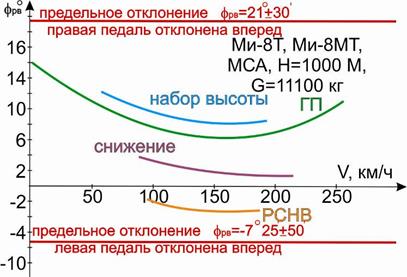
Рис. 57. Кривые балансировочных изменений шага рулевого винта для различных режимов полета
С ростом скорости от экономической до максимальной растет мощность потребная, увеличивается потребное балансировоное отклонение правой педали впе-
ред (хода штока рулевого винта).
С ростом скорости аэродинамическая эффективность рулевого винта увеличивается. Поэтому наименьшее потребное отклонение правой педали (хода штока рулевого винта) не на экономической скорости, а на скоростях 170 – 180 км/час. С дальнейшим ростом скорости потребное отклонение правой педали увеличивается.
При наборе высоты потребное отклонение правой педали вперед больше, чем в горизонтальном полете на той же скорости из-за большей потребной мощности. На режиме самовращения несущего винта для путевой балансировки вертолета вперед отклоняется левая педаль.
Минимальный запас хода правой педали наблюдается на режиме висения с максимальным взлетным весом и с предельно допустимым по скорости боковым ветром.
Минимальный запас хода левой педали наблюдается на планировании на режиме самовращения несущего винта.
|
|
|
