 |


2.4.2 Боковое равновесие без скольжения (с креном)
|
|
|
|
2. 4. 2 Боковое равновесие без скольжения (с креном)
Условия равновесия:
 ® b=0;
® b=0;
 g=const; (2. 29)
g=const; (2. 29)
 ® y=const.
® y=const.

Рис. 58. Боковая балансировка вертолета с креном
При полете без скольжения силы вдоль оси Zа должны быть уравновешены, т. е. Трв=ТZa.
Для создания силы ТZа необходимо отклонение силы Тнв от оси вала несущего винта вправо.
При этом появится момент, кренящий вертолет вправо:
 . (2. 30)
. (2. 30)
При появлении правого крена возникает составляющая силы тяжести  , помогающая уравновесить силу тяги рулевого винта при ТZa < ТРВ и YT > hРВ.
, помогающая уравновесить силу тяги рулевого винта при ТZa < ТРВ и YT > hРВ.
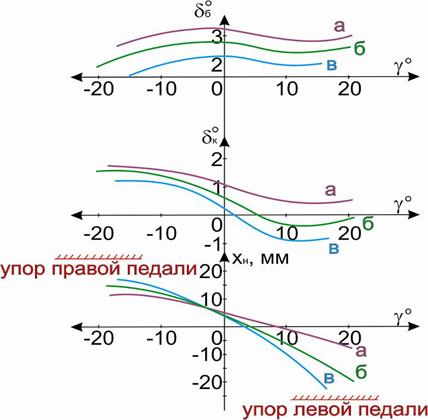
На висении вертолет балансируется с правым креном γ = 2 – 3º и при отклоненной ручке управления вправо.
Смещение центра масс к правому борту (+Zт) уменьшает потребное отклонение ручки управления (автомата перекоса) вправо.
Смещение центра масс к левому борту (–Zт) увеличивает потребное отклонение ручки управления (автомата перекоса) вправо.
С увеличением скорости полета увеличивается угол естественного завала конуса несущего винта вправо и уменьшается сила тяги рулевого винта, потребная для уравновешивания реактивного момента несущего винта. Уменьшается потребное отклонение ручки управления (автомата перекоса) вправо.
Величина угла крена при поперечной балансировке вертолета пропорциональна величине силы тяги рулевого винта:
 ; (2. 31)
; (2. 31)
 , но
, но  , а
, а  .
.
Таким образом, угол крена зависит от подводимой мощности. Поэтому, от режима висения до скорости экономической, величина угла крена уменьшается до 1о20′. Далее, при увеличении скорости до максимальной, угол крена увеличивается до 2о.
Ввиду малых значений путевых моментов  и
и  ими можно пренебречь.
ими можно пренебречь.
|
|
|
2. 4. 3 Боковое равновесие вертолета со скольжением
В полете без крена под действием неуравновешенной силы (ТРВ – ТZa) появляется левое скольжение, а вместе с ним и боковая сила на фюзеляже Zф, дополняющая силу ТZa для уравновешивания ТРВ.
Поэтому для сохранения поперечной балансировки с ростом скорости, угол скольжения уменьшается.
Условия равновесия:
 b = const; (2. 32)
b = const; (2. 32)
 ® g = 0; (2. 33)
® g = 0; (2. 33)
 ® y = const. (2. 34)
® y = const. (2. 34)
При левом скольжении возрастающие поперечные моменты несущего винта, рулевого винта и фюзеляжа кренят вертолет вправо. Поэтому для балансировки вертолета в поперечном отношении без крена необходимо дополнительно отклонить автомат перекоса влево, против скольжения.

Рис. 59. Боковое равновесие вертолета со скольжением
При скольжении на правый борт для балансировки вертолета в поперечном отношении без крена необходимо дополнительно отклонить автомат перекоса вправо, против скольжения.
Полет со скольжением «сносит» вертолет относительно компасного курса на угол скольжения.
Путевая балансировка выполняется изменением силы тяги рулевого винта, т. е. отклонениями педалей (изменением хода штока рулевого винта).
Условие путевого равновесия:
 . (2. 35)
. (2. 35)
Ввиду малости значений путевых моментов  и
и  ими можно пренебречь.
ими можно пренебречь.
Балансировка вертолета на виражах, спиралях и координированных скольжениях
Увеличение угла крена на виражах и спиралях с набором высоты, а следовательно и нормальной перегрузки, приводит к заметному отклонению ручки управления «на себя». На левых виражах и спиралях отклонение ручки управления «на себя» больше, чем на правых. Снижение режима работы двигателей уменьшает расход ручки управления «на себя».
Поперечная и путевая балансировка на спиралях изменяется незначительно.
|
|
|
Режимы координированных скольжений в летной эксплуатации вертолета применяются в отдельных случаях.
Примерами применения режимов координированного скольжения могут служить: прямолинейный полет с отказавшим путевым управлением, висение над заданной точкой с определенным курсом при наличии бокового ветра, перемещения в бок.
Координированное скольжение выполняется отклонением педалей в соответствующем направлении. Устранение кренящих моментов, возникающих при этом, осуществлятся отклонением ручки управления в поперечном направлении.
Условиями боковой балансировки вертолета являются равновесие моментов относительно вертикальной и прдольной осей и равновесие проекций сил на поперечную ось: ∑ Мy=0; ∑ Мx=0; ∑ Fzа=0.
Иногда в практике летной эксплуатации используют режим координированного скольжения, когда необходимо выдержать прямолинейный поступательный полет по заданному курсу при наличии бокового ветра (при заходе на посадку).
В данном случае угол скольжения определяется условиями сохранения заданного курса полета, а не условиями сохранения нулевого угла крена.
|
|
|
