 |


7. 3 планирование вертолета на режиме самовращения
|
|
|
|
7. 3 ПЛАНИРОВАНИЕ ВЕРТОЛЕТА НА РЕЖИМЕ САМОВРАЩЕНИЯ
НЕСУЩЕГО ВИНТА
7. 3. 1 Балансировка вертолета на РСНВ
На рисунке 120 изображена схема сил и моментов, действующих на вертолет при снижении на режиме самовращения несущего винта.


Рис. 120. Балансировка вертолета при планировании на РСНВ
Уравнения движения вертолета при планировании на РСНВ будут иметь вид:
а) в продольном отношении:
1. ∑ FXа = G · sinθ – Xвр – ТХа = 0 → V = const; (7. 4)
2. ∑ FУа = ТУа – G · cosθ = 0 → θ сн = сonst (Vy=const); (7. 5)
3.  = –Мzгш – ТНВ · lТ + MРрв – Yст · lст = 0 → J = const; (7. 6)
= –Мzгш – ТНВ · lТ + MРрв – Yст · lст = 0 → J = const; (7. 6)
б) в поперечном отношении:
4. ∑ FZа = – ТZа + ТРВ – Zф=0 → VZ = const; (7. 7)
или
∑ FZа=–G · sinγ – ТZа+ ТРВ=0 → VZ = 0;
5. ∑ MX = – MXгш – ТZа · УТ + ТРВ ·hрв = 0 → γ = 0; (7. 8)
6. ∑ МУ = – Мнв + ТРВ · lРВ = 0 → Ψ = 0. (7. 9)
Необходимую вертикальную скорость снижения (VУmin=8 – 12 м/с) летчик устанавливает изменением общего шага НВ (7. 5) и подбором соответствующей поступательной скорости планирования (7. 4).
По углу тангажа вертолет балансируется при V < 140 – 150 км/ч с J > 0, при V > 140 – 150 км/ч с J < 0 (рис. 91, 92).
Есть определенные особенности балансировки вертолета в поперечном отношении. Так как на РСНВ тяга рулевого винта отклонением левой педали «перекладывается» в правую сторону, то на РСНВ балансировка вертолета выполняется либо с правым скольжением, либо с левым креном.
|
|
|
Рассматривая ход балансировочных кривых, мы видим, что максимальное отклонение РУ влево при снижении на РСНВ соответствует Vплmax. Величины балансировочных углов крена и скольжения такие же, как и при моторном снижении на экономической скорости.
7. 3. 2 «Указательница глиссад» снижения, ее анализ
Зависимость VУсн. = f (Vпл) при различных углах наклона траектории называется «указательницей глиссад» планирования на режиме самовращения (рис. 121).
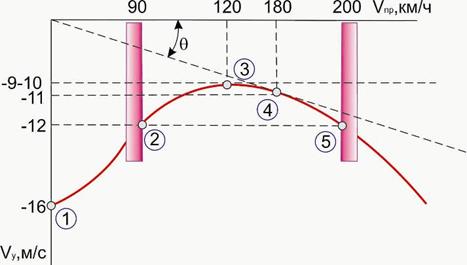
Рис. 121. «Указательница глиссад» планирования на РСНВ
Для ее построения необходимо использовать кривые Н. Е. Жуковского при отказе силовой установки (Nподв. = 0).
Зная полетную массу вертолета и значение NГП для соответствующей скорости планирования, можно определить VУсн. , используя формулу
 . (7. 10)
. (7. 10)
Таким образом, определяют VУсн. для всех скоростей планирования (или, что то же самое, для горизонтального полета) и строят зависимость VУ сн. = f (Vпл) (рис. 121).
Так как угол наклона траектории равен:
 , (7. 11)
, (7. 11)
то его можно определить графически из зависимости VУсн. = f (Vпл), проведя из начала координат к любой точке кривой прямую линию. Искомый угол будет находиться между прямой и осью Vпл.
На указательнице имеется пять характерных точек:
- точка 1 – режим вертикального снижения (парашютирование), VУсн. = 16 – 17 м/с;
- точка 2 – снижение на Vпл min. Используется при выполнении посадки на площадку, ограниченную препятствиями. Уменьшать Vпл < Vпл min не рекомендуется, т. к. это приведет к значительному увеличению VУсн. ;
- точка 3 соответствует минимальной вертикальной скорости снижения на РСНВ (для Ми-8→ 9 – 10 м/с), следовательно, максимальной продолжительности полета на Vпл = VЭК;
- точка 4 соответствует режиму максимальной дальности планирования, минимальному углу наклона траектории;
|
|
|
- тоска 5 – режим максимально допустимой скорости планирования. Превышение VПЛ max приводит к значительному росту вертикальной скорости снижения.
Увеличение полетной массы вертолета и высоты полета приводит к смещению кривой вниз, т. е. к увеличению вертикальной скорости снижения.
Рекомендуемые скорости планирования на режиме самовращения те же, что и при моторном снижении по наклонной траектории.
При отсутствии графиков NГП = f (V) величина VУmin может оцениваться в зависимости от удельной нагрузки и барометрической высоты  по следующей формуле:
по следующей формуле:
 , (7. 12)
, (7. 12)
где  и
и  .
.
На высотах от Н = 0 до 1000 м вертикальная скорость на режиме самовращения НВ составляет Vymin ≈ 9 – 10 м/с.
|
|
|
