 |


2.2. Анализ кривой девиации магнитного компаса.
|
|
|
|
2. 2. Анализ кривой девиации магнитного компаса.
Таблица 2. 2.
Зависимость девиации магнитного компаса от курса судна
| МК | d |
| 8, 0 | |
| -6 | |
| -0, 5 | |
| 3, 7 | |
| 2, 8 | |
| -2 | |
| -4, 2 | |
| -4 |
Разлагая кривую девиации в ряд Фурье, определили коэффициенты девиации:
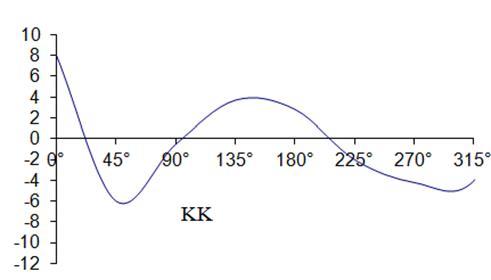
Рис. 2. 2. Кривая девиации ДМК

Рис. 2. 3. Круговая девиация
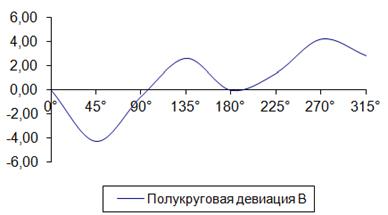
Рис. 2. 4. Полукруговая девиация B
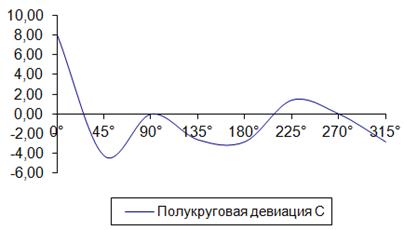
Рис. 2. 5. Полукруговая девиация С
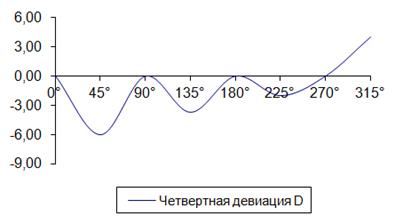
Рис. 2. 6. Четвертная девиация D

Рис. 2. 7. Четвертная девиация E
После построения графика зависимости девиации от курса судна и разложения кривой девиации в ряд Фурье, определили параметры составляющих круговой, полукруговой и остаточной девиаций. Так как полученные значения оказались достаточно значительными то необходимо произвести устранение полукруговой девиации способом Эри или Колонга, и устранение четвертной девиаций с помощью брусков круглого сечения, установленных продольно в верхней части нактоуза компаса.
2. 3. Анализ работы следящей системы.
Проверки производимые для оценки качества следящей системы сводятся к следующим действиям:
1. проверить скорость отработки в установившемся режиме и зафиксировать показания шкалы ИК;
2. отклонить картушку котелка на угол 900-1000 с помощью магнита; убрать магнит и зафиксировать время отработки следящей системы угла примерно в 500- 600. По полученным данным определить скорость отработки, которая должна быть не менее 6 измерений/сек.
3. Проверка разности показаний репитера и котелка осуществляется сличением этих показаний на 4-х - 6-ти искусственных курсах, устанавливаемых магнитом. Разность показаний не должна превышать ± 0, 50.
|
|
|
4. Проверка количества колебаний котелка производится отклонением котелка от горизонтальной оси и подсчета этих колебаний. Их число не должно превышать 3-5.
В таблице 2. 2 приведены данные, определяющие МК судна, его компасный курс КК, снятый с картушки компаса, и курс К, снятый с центрального репитера прибора. Используя эти данные, была построена кривая, характеризующая зависимость девиации d и погрешности работы дистанционной следящей системы от магнитного курса судна.
Таблица 2. 2.
Данные для построения кривой, характеризующей зависимость девиации d и погрешности работы дистанционной следящей системы от магнитного курса судна.
| МК | 0, 0° | 30, 0° | 60, 0° | 90, 0° | 120, 0° | 150, 0° | 180, 0° | 210, 0° | 240, 0° | 270, 0° | 300, 0° | 330, 0° | 360, 0° |
| КК | 30, 1 | 60, 0 | 120, 1 | 150, 2 | 180, 1 | 240, 2 | 270, 1 | 330, 1 | 360, 2 | ||||
| К | 0, 1 | 30, 1 | 60, 2 | 90, 1 | 120, 1 | 150, 0 | 180, 1 | 210, 1 | 240, 0 | 270, 0 | 300, 1 | 330, 2 | 360, 2 |
Девиация находится по формуле: d = МК – КК, погрешность работы дистанционной следящей системы находится как разница между КК и К Вычисления приведем в таблице 2. 3:
Таблица 2. 3.
| d | 0, 0° | -0, 1° | 0, 0° | 0, 0° | -0, 1° | -0, 2° | -0, 1° | 0, 0° | -0, 2° | -0, 1° | 0, 0° | -0, 1° | -0, 2° |
| Dd | -0, 1° | 0, 0° | -0, 2° | -0, 1° | 0, 0° | 0, 2° | 0, 0° | -0, 1° | 0, 2° | 0, 1° | -0, 1° | -0, 1° | 0, 0° |
На основе данных таблиц, построим график зависимости Девиации и Погрешности от работы дистанционной следящей системы от МК.
Из графика 2. 8 видно, что компас имеет неравномерное распределение погрешностей по всему диапазону картушки. Погрешность работы дистанционной следящей системы в целом не превышает 0, 2°, что говорит о хорошей работе следящей системы.

Рис. 2. 8. График зависимости Девиации и Погрешности работы дистанционной следящей системы от МК
3. РАБОТЫ, ВЫПОЛНЯЕМЫЕ В РЕЙСЕ В СЛУЧАЕ ОТКАЗА ГИРОКОМПАСА
3. 1. Оценка необходимой точности положения судна при пеленговании.
|
|
|
Во многих случаях постоянная девиация А имеет малую величину, поэтому МП достаточно вычислить по приближенной формуле. Если же коэффициент А велик, то его необходимо принимать во внимание величину А из предыдущей таблицы остаточной девиации.
Поступая таким образом, следует иметь в виду, что коэффициент А включает в себя собственно постоянную девиацию и инструментальную ошибку — в основном погрешность установки призмы пеленгатора. Последняя у разных экземпляров пеленгаторов имеет различную величину и иногда достигает больших значений. Поэтому, чтобы получить величину магнитного пеленга (с учетом коэффициента А), необходимо производить наблюдения тем пеленгатором, который использовался при определении пеленгов для составления последней таблицы остаточной девиации.
Все сказанное выше полностью относится и к определению девиации по пеленгам отдаленного предмета. Пользуясь вместо створа отдаленным предметом, следует учитывать то обстоятельство, что магнитный пеленг предмета изменяется при перемещении судна.
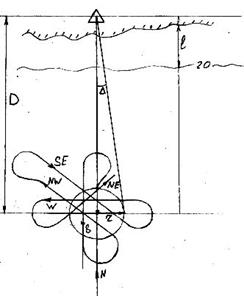
Рис. 3. 1. Схема маневрирования судна в процессе пеленгования и зону пеленгования
Из рисунка видно, что изменение пеленга зависит от радиуса r окружности, внутри которой маневрирует судно, и расстояния D до пеленгуемого предмета. Проведем из точки Р, где находится предмет, касательную к окружности и обозначим угол между прямыми ОР и КР через D. Тогда из прямоугольного треугольника РКО получим r = D x sinD, откуда, если угол D выражен в градусах:
Величина  , характеризующая изменение магнитного пеленга, не должна превышать 0, 2°.
, характеризующая изменение магнитного пеленга, не должна превышать 0, 2°.
Формула позволяет по известной величине r найти то минимальное расстояние D, при котором точность определения девиации будет лежать в указанных пределах (0, 2°), и наоборот, по известному отстоянию от объекта найти радиус r.
При r = 1 кб и D = 0, 2° для точного определения девиации необходимо пеленговать предметы, находящиеся на расстоянии в 10 миль и более:
 мили
мили
Наблюдать столь удаленные предметы удается только в исключительных случаях. Поэтому на практике часто приходится использовать более близкие к судну предметы.
Проведем оценку необходимой точности приведения судна в точку пеленгования при определении девиации МК путем измерения компасных пеленгов на ориентир.
|
|
|
Считаем линию берега прямолинейной, а линию малых глубин параллельной линии берега.
По заданию отстояние ориентира L=0, 3 мили и линия малых глубин от линии берега l =1, 0 миля.
Тогда для обеспечения необходимой точности приведения судна в точку пеленгования радиус зоны пеленгования должен быть:
R=D. /60=1, 3. 0, 2/60=0, 004 мили=0, 04 кб=8, 0 м
При D=10 миль:
R=D. /60=10. 0, 2/60=0, 03 мили=0, 3 кб=55, 6 м
Таким образом, при расстоянии до ориентира D в пределах 1, 3 – 10 миль радиус окружности r меняется в пределах 8 – 55, 6 м.
|
|
|
