 |


Оценка погрешности выведения БЛА в район посадки с помощью БИНС и возможные конфигурация зоны перехвата при обнаружении БЛА вблизи ВПП с помощью группы радиопеленгаторов
|
|
|
|
При возвращении БЛА в район посадки по команде с земли возможна различная точность выведения на ось ВПП, в первую очередь зависящая от отказоустойчивости навигационных средств. Например, навигация с помощью СНС позволяет с нужной точностью решить бортовой системе управления задачу выхода на ось ВПП и последующего снижения по традиционной прямолинейной глиссаде.
Однако, если со стороны СНС возникает отказ в обслуживания еще во время выполнения полетного задания по заданному маршруту, то при команде на возвращение будет использоваться БИНС, имеющая ограниченную точность.
Так, имеется отечественная разработка, выполненная Раменским ОКБ и имеющая минимальный вес за счет микромеханических датчиков, которую характеризует следующая погрешность ΔZ.
 при полете в течение получаса
при полете в течение получаса
Считая, что приближенно путь ΔZ вычисляется по формуле
где  – погрешность акселерометра, равная
– погрешность акселерометра, равная  м/с2, то можно составить следующую формулу зависимости погрешности
м/с2, то можно составить следующую формулу зависимости погрешности  от дальности r между местом посадки и БЛА в момент приказа вернуться, учитывающую среднюю скорость возвращения V.
от дальности r между местом посадки и БЛА в момент приказа вернуться, учитывающую среднюю скорость возвращения V.

Например, если при  м/с задаться дальностью r=400км, то получим погрешность навигации
м/с задаться дальностью r=400км, то получим погрешность навигации  м, при которой практически невозможно сразу использовать наземный пеленгатор в режиме наведения на ВПП, а необходимо вначале решить важнейшую задачу обнаружения БЛА в районе посадки.
м, при которой практически невозможно сразу использовать наземный пеленгатор в режиме наведения на ВПП, а необходимо вначале решить важнейшую задачу обнаружения БЛА в районе посадки.
Решение этой задачи невозможно при подлете к месту посадки на малой высоте. Кроме того, при ограниченном секторе обзора наземного мобильного радиопеленгатора (например, в телесном угле ± 10 град.) нужно применить группу сканирующих пеленгаторов.
Варианты конфигурации зон перехвата БЛА показаны на рис. 2.6, 2.7, 2.8.
|
|
|
В первом варианте, показанном на рис 2.6., наземные пеленгаторы занимают “круговую оборону” для случая совершенно неизвестного курса возвращения БЛА, что маловероятно при использовании СНС до команды на
посадку.
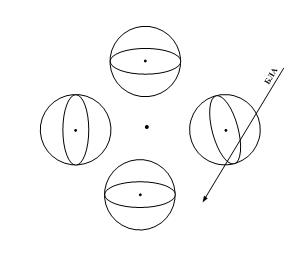

Рис.2.6 Круговая зона перехвата БЛА Рис.2.7 Рубежная зона перехвата
при его обнаружении на большой БЛА с учетном его наиболее
высоте вероятного курса полета при
возвращении
Считая второй вариант на рис.2.7 более предпочтительным с использованием трех радиопеленгаторов и задавшись диапазоном ∆φ угла места (по азимуту сканирование может не быть), равным 60°, получим высоту подлета  , где n- число радиопеленгаторов на рубеже. Таким образом, имеем
, где n- число радиопеленгаторов на рубеже. Таким образом, имеем  , или при
, или при  получим
получим

Из формулы (2.1) видно, что при дальности  высота подлета Н>1000 м, а это значит, что затем снижение должно производиться только при использовании спиральной глиссады, т.к в этом случае удается периодически повышать точность навигации при попадании снижающегося по спирали БЛА в один из секторов обзора радиопеленгатора.
высота подлета Н>1000 м, а это значит, что затем снижение должно производиться только при использовании спиральной глиссады, т.к в этом случае удается периодически повышать точность навигации при попадании снижающегося по спирали БЛА в один из секторов обзора радиопеленгатора.
Таким образом, наряду с аппаратной отказоустойчивостью (например, при отказе СНС), будет достигнута функциональная отказоустойчивость- БЛА будет принят на обслуживание при посадке и не погибнет.
Однако нужно заметить, что в этом случае в конце снижения должна использоваться чрезвычайно короткая по длине прямолинейная глиссада длиной ≈ 1000 м, при горизонтальном полете при вписывании в глиссаду по прямой длиной 500 м на начальной высоте 
Рассмотренный второй вариант схемы обнаружения БЛА, хотя он и проще первого, все-таки обладает недостатком необходимого сканирования радиолуча по азимуту в заданном секторе, если иметь узкий лепесток диаграммы направленности пеленгатора. Если эта диаграмма имеет достаточно широкий лепесток возможного обнаружения цели без сканирования угла, например в диапазоне  , то тогда рубеж перехвата можно организовать в секторе
, то тогда рубеж перехвата можно организовать в секторе  с помощью трех несканирующих пеленгаторов на большей дальности порядка
с помощью трех несканирующих пеленгаторов на большей дальности порядка  при высоте подлета
при высоте подлета  и при угле места порядка
и при угле места порядка  , как это показано на рис.2.8
, как это показано на рис.2.8
|
|
|
Рис 2.8. Рубеж перехвата БЛА при его обнаружении над горизонтом при малом угле места  радиана с помощью трех несканирующих пеленгаторов
радиана с помощью трех несканирующих пеленгаторов
В этом случае «окно» захвата будет иметь размер  , в которое наверняка попадет БЛА в точке D, при подлете к месту посадки с помощью неточной БИНС и начальной дистанции возвращения порядка
, в которое наверняка попадет БЛА в точке D, при подлете к месту посадки с помощью неточной БИНС и начальной дистанции возвращения порядка  .
.
Однако после уточнения координат на указанной рубеже, БЛА без сопровождения должен добраться до точки  прямолинейного участка посадки и одновременно снизиться с высоты до высоты порядка
прямолинейного участка посадки и одновременно снизиться с высоты до высоты порядка  , на которой будет осуществляться движение на последних двух-трёх витках спирали. Случай подлета БЛА со стороны, противоположной нужному направлению вписывания в глиссаду, показан на рис 2.9
, на которой будет осуществляться движение на последних двух-трёх витках спирали. Случай подлета БЛА со стороны, противоположной нужному направлению вписывания в глиссаду, показан на рис 2.9

Рис 2.9. Схема повторного рубежа перехвата при обнаружении БЛА на последних витках снижения к месту посадки
Из рисунка видно, что центр спирали будет отстоять от точки В повторного перехвата БЛА на расстоянии  , и поэтому радиус R виражей должен быть порядка
, и поэтому радиус R виражей должен быть порядка  . Высота перехвата окажется равной
. Высота перехвата окажется равной  . Значит, БЛА будет лететь от точки D первого перехвата к точке
. Значит, БЛА будет лететь от точки D первого перехвата к точке  второго перехвата примерно при выполнении
второго перехвата примерно при выполнении  витков спирали в течение не более получаса. Поэтому в бортовой БИНС снова накопится ошибка порядка
витков спирали в течение не более получаса. Поэтому в бортовой БИНС снова накопится ошибка порядка  , без устранения которой невозможно выведение БЛА на ось ВВП в точке с нужной точностью, чтобы гарантированно попасть в «окно» точного наведения основного пеленгатора, работающего в штатном режиме снижения по прямолинейной глиссаде.
, без устранения которой невозможно выведение БЛА на ось ВВП в точке с нужной точностью, чтобы гарантированно попасть в «окно» точного наведения основного пеленгатора, работающего в штатном режиме снижения по прямолинейной глиссаде.
Поэтому после уточнения в двух точках и С ошибка навигации снова снизится до значений не более  , после чего БЛА опять «вслепую» должен сам в автоматическом режиме попасть на ось ВПП в окрестности точки , снижаясь на последних витках до высоты
, после чего БЛА опять «вслепую» должен сам в автоматическом режиме попасть на ось ВПП в окрестности точки , снижаясь на последних витках до высоты  .
.
Таким образом, в логику действий возвращения к месту посадки без СНС по крайней мере должны быть заложены условия обнаружения БЛА дважды при подлете на дистанции  и при снижении по спирали на дистанции от центра спирали, и один раз-при выходе БЛА на ось ВПП на малой высоте.
и при снижении по спирали на дистанции от центра спирали, и один раз-при выходе БЛА на ось ВПП на малой высоте.
|
|
|
Встречные требования со стороны САУ к наземному пеленгатору по точности сопровождения БЛА при заходе на посадку, включая снижение по спирали, и на самой прямолинейной глиссаде, обеспечивающие возможность попадания БЛА в заданную точку приземления.
Картина пространственного движения БЛА на большой высоте при возвращении к месту посадки, последующего снижения по спирали и завершающем выходе на короткую прямолинейную глиссаду, показана на рис.2.10.

Рис.2.10. Картина движения БЛА и его обнаружения при снижении по спирали с уменьшающимся радиусом, выходе на ось ВПП, снижении по прямоугольной глиссаде и выполнении посадочного маневра.
На рис 2.10 точки I,II,III – места расположения основного и дополнительных пеленгаторов в окрестности ВПП
Совершенно очевидно, что точность навигации БЛА различна при первом обнаружении на рубеже перехвата, втором обнаружении на нижних витках спирали и снижении по прямолинейной глиссаде. Если нужные требования по точности не будут соблюдены, то может произойти срыв процесса управления.
На рис 2.10 в точках 1,2,3.4,5 показаны цифры уменьшающихся допустимых ошибок навигации по мере выполнения процесса посадки. В точке 1 на максимальной высоте уточнение координат произойдёт с ошибкой ∆Z=6м(показанная в скобках цифра 3500м соответствует априорной точности навигации БИНС). В точках 2 и 3 происходит повторное уточнение координат, как показано на рис 2.10.
Логику управления полетом при возвращении БЛА с помощью БИНС можно представить следующим образом. Как было сказано выше, вначале в зависимости от удаления rв момент получения команды с земли определяется высота подлета  , и этот факт запоминается, чтобы его не повторять на следующим шаге принятия решения.
, и этот факт запоминается, чтобы его не повторять на следующим шаге принятия решения.
Затем принимается решение, на какой круг в конце снижения на высоте  должен попасть БЛА, чтобы выйти на ось ВПП. - левый или правый. Можно использовать следующее простое правило выбора одной из альтернатив: j = 1
должен попасть БЛА, чтобы выйти на ось ВПП. - левый или правый. Можно использовать следующее простое правило выбора одной из альтернатив: j = 1
- выбирается левой круг согласно рис. 1.2, j = 2 – правый круг:
|
|
|
j = 1 – при 
j = 2 – при 
После выбора варианта снижения в автомат управления по крену вводится пара уставок по вычислению отклонений  бокового движения и угла курса
бокового движения и угла курса  , меняющихся в зависимости от назначенного радиуса спирали R, уменьшающегося при снижении по высоте. При этом на каждом витке полета должно производиться периодическое уточнение координат, оцениваемых с помощью БИНС.
, меняющихся в зависимости от назначенного радиуса спирали R, уменьшающегося при снижении по высоте. При этом на каждом витке полета должно производиться периодическое уточнение координат, оцениваемых с помощью БИНС.
Иллюстрация этого последовательного уточнения, столь необходимого для выведения БЛА в нужную точку начала прямолинейного движения по оси ВПП в конце посадки, дана в виде цифр, соответствующих пяти показанным точкам полета. Первая цифра – это высота полета (в точке 1  ), вторая цифра – точность привязки БЛА, достигнутая наземными радиолокаторами I, II, III в момент обнаружения (в точке 1
), вторая цифра – точность привязки БЛА, достигнутая наземными радиолокаторами I, II, III в момент обнаружения (в точке 1  ), третья цифра в скобках – точность привязки достигнутая с помощью БИНС без локаторов I, II, III (в точке 1 это 3500м).
), третья цифра в скобках – точность привязки достигнутая с помощью БИНС без локаторов I, II, III (в точке 1 это 3500м).
Далее при снижении осуществляется последовательное уточнение, в частности:
В точке 2  ,
,  (120м)
(120м)
В точке 3  ,
,  (6м)
(6м)
С этого момента при попадании на посадочную высоту  радиолокаторы I, II, III начинают работу в штатном режиме пеленгатора. Поэтому БЛА должен попасть в нужное «окно» его диаграммы направленности. Если это произошло, то затем в точках 4,5 требуемая точность пеленгатора должна соответствовать допустимым погрешностям, примерно равным 2% от имеющейся высоты. Поэтому в точках 4(начало снижения по прямолинейной глиссаде) и 5 (начало схода с глиссады) имеем следующие цифры
радиолокаторы I, II, III начинают работу в штатном режиме пеленгатора. Поэтому БЛА должен попасть в нужное «окно» его диаграммы направленности. Если это произошло, то затем в точках 4,5 требуемая точность пеленгатора должна соответствовать допустимым погрешностям, примерно равным 2% от имеющейся высоты. Поэтому в точках 4(начало снижения по прямолинейной глиссаде) и 5 (начало схода с глиссады) имеем следующие цифры
В точке 4 – Н=50 м Δy=3м (5 м)
В точке 5 – Н=10 м Δy=0,3м (3 м)
В точке 6 – Н=1 м Δy=0,15м (0,3 м)
Из проведенного анализа можно сделать дополнительный вывод о том, что при контроле безопасности посадки после снижения по спирали можно ограничиться проверкой условий точности привязки координат БЛА лишь в точках 3,4,5.
Затем на завершающей стадии посадки при посадочном маневре и пробеге после приземления необходимо осуществить непрерывный контроль безопасности с помощью алгоритмов, описанных далее в главе V.
Ниже даётся описание логического анализатора 7 захода на посадку по спирали в редком, но возможном случае использования БИНС. Поэтому его номер стал последним в списке, начальные номера которых указаны для типичной штатной ситуации.
|
|
|
