 |


Таблица 13.6. Перемещения суставной головки и диска при различных движениях нижней челюсти
|
|
|
|
S4Q
 |
|

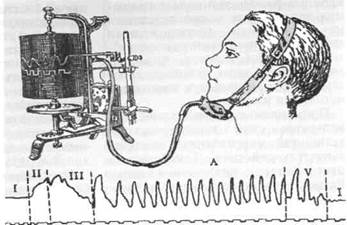
| Рис. 13. 32. Регистрация суставного пути и его запись на миллиметровой сетке. 1 — траектория суставного пути в виде кривой. Линия смещения оси суставной головки при перемещении нижней челюсти вниз совпадает с обратным движением; 2 — первые 5 мм кривой, соотнесенные к франкфуртской плоскости, образуют угол суставного пути. |
|
|

| Рис. 13. 31. Угол Беннета. |
Таблица 13. 6. Перемещения суставной головки и диска при различных движениях нижней челюсти
| Движения нижней челюсти | Движения в суставе |
| Небольшие вниз, вверх Максимальное вниз Вперед и назад Боковое смещение | Головка мыщелка вращается по своей продольной оси по отношению к диску, движение в подменисковой зоне Ротационные движения головки мыщелка и скольжение вместе с диском вперед и вниз по заднему скату суставного бугорка, одновременные движения в подменисковой зоне Скольжение суставной головки с диском вперед и назад по заднему скату суставного бугорка и незначительные шарнирные движения, движения в над- и подменисковой зонах Балансирующая сторона: одностороннее выдвижение на суставной бугорок диска и головки, движения в подменисковой зоне. Рабочая сторона: движение суставной головки вокруг вертикальной оси, диск неподвижный, движения в подменисковой зоне |
ложения нижней челюсти либо разобщением зубных рядов.
Строение ВНЧС позволяет нижней челюсти совершать движения в трех плоскостях: в вертикальной — вниз, вверх (открывание и закрывание), в сагиттальной — вперед, назад и в трансверсальной — вправо, влево. Любое положение нижней челюсти является комбинацией этих движений, любая мышца, прикрепляющаяся к нижней челюсти, может осуществить движение в суставе. В табл. 13. 6 представлены параметры перемещения суставной головки и диска при различных движениях нижней челюсти.
|
|
|
Смещение оси суставной головки вниз и вперед в сагиттальной и вертикальной плоскостях при перемещении нижней челюсти вперед и максимально вниз образует путь, характеризующийся расстоянием и траекторией, имеющей вид кривой, которая образует с франкфуртской плоскостью угол суставного пути. При движении нижней челюсти в сторону на стороне сократившейся латеральной крыловидной мышцы суставная головка с диском скользит по суставной поверхности суставного бугорка вниз, вперед и несколько наружу. Передневнутрен-нее смещение мыщелка в сторону глазницы по отношению к сагиттальному суставному пути составляет угол, описанный Беннетом и названный его именем. В среднем он равен 17° (рис. 13. 31).
Кривая суставного пути, угол суставного пути и угол Беннета находятся в прямой зависимости от анатомического строения и функции ВНЧС.
Для записи и измерения суставного пути используют различные методы.
Аксиография — метод, позволяющий осуществить графическую запись траектории смешения суставной головки и диска при различных движениях нижней челюсти с помощью аксиографа. Для записи
пути смещения сустава осуществляют следующие действия: 1) регистратор устанавливают острием на отметке " О" координатной сетки при наиболее ретрузионном положении нижней челюсти пациента; 2) окончательно фиксируют удерживающие зажимы и пациента просят выдвинуть нижнюю челюсть вперед, чтобы проверить наличие регистратора на регистрационной площадке. После этого путь смещения сустава может быть записан при любых движениях нижней челюсти; 3) при произвольном максимальном перемещении пациентом нижней челюсти вниз регистрируют кривую движения суставной головки и диска по заднему скату суставного бугорка (рис. 13. 32).
|
|
|
Изучение состояния зубов и тканей пародонта. Пародонт является опорно-удерживающим аппаратом зубов, его функциональное состояние обусловлено аномалиями зубов, зубных рядов, прикуса, что необходимо учитывать при планировании ортодонтического лечения и определении продолжительности ретенционного периода.
Для изучения состояния опорных тканей зубов используют электро-

одонтодиагностику, гнатодинамо-метрию, периотестометрию, реопа-родонтографию. Наиболее информативным методом диагностики является периотестометрия, которую можно проводить с помощью компактного прибора «Периотест», состоящего из двух частей: приборного блока компьютерного анализа и наконечника, соединенных между собой кабелем (рис. 13. 33).
Компьютерный анализатор включает в себя источник питания, 4 микропроцессора, логические схемы сравнения. Два микропроцессора служат для обработки информации, 3-й — содержит программу управления, в 4-й заложена речевая программа. Программа аппарата предусматривает автоматическое перкутирование коронки зуба 16 раз (со скоростью 4 удара в секунду). Результаты измерения выдаются в звуковом виде и в виде цифровой информации на дисплее. При каждом измерительном импульсе аппарат издает короткий звуковой сигнал, а после окончания измерения следует длинный звуковой сигнал. Затем на цифровом индикаторе появляется соответствующий индекс, который сопровождается звуковой речевой информацией.
 |
|
|
|

| рис. 13. 34. Мастика-циограф и мастикацио-граммы. |

Рис. 13. 33. Аппарат «Периотест». Объяснение в тексте.
Рабочим элементом в наконечнике является боек, включающий пье-зоэлемент, работающий в двух режимах — генераторном и приемном. Первый режим — возбуждение механического ударного импульса и передача его бойку, второй — прием ответного сигнала механической системы и передача его для анализа в микропроцессорную часть. Нажимая кнопку на наконечнике, преобразуют электрический импульс в механический.
Удар бойком проводят по вестибулярной поверхности зуба через 250 мс. За этот период возбужденный ударом импульс проходит по зубу, передается тканям периодонта и отражается от них. В зависимости от состояния периодонта, его волоконного аппарата отраженный сигнал существенно изменяется. Чем выше эластичность волокон периодонта, тем выше демпфирующие (амортизирующие) свойства периодонталь-ного связочного аппарата [Копей-кин В. Н., 1980] и тем короче время взаимодействия бойка с зубом. Микрокомпьютер прибора регистрирует характеристики взаимодействия бойка с зубом, рассчитывает характеристику демпфирующих свойств периодонта за 16 ударов, контролирует правильность полученных результатов, которые после каждой серии ударов отображаются в виде индекса.
|
|
|
Одним из обязательных условий при проведении исследования является определенное положение головы пациента, а также должно быть исключено смыкание зубов. При исследованиях группы верхних фронтальных зубов голову пациента следует слегка наклонить вниз, при исследовании группы нижних передних зубов голову его отклоняют назад. При изучении состояния опорных тканей пародонта боковых зубов на верхней челюсти пациент отклоняет голову влево или вправо.
При изучении состояния периодонта перкуссию исследуемого зуба проводят бойком наконечника, который должен быть направлен горизонтально и под прямым углом к середине вестибулярной поверхности коронки зуба и располагаться от него на расстоянии 0, 5—2 мм. Перкуссию постоянного зуба проводят на уровне между режущей поверхностью зуба и экватором, так как зубы исследовались на различной стадии прорезывания и формирования их корневой части. Отклонение наконечника от указанного положения приводит к искажению звукового сигнала, отсутствию индекса на цифровом индикаторе и звуковой речевой информации.
Регистрация движения нижней челюсти — гнатография проводится по методу Рубинова. Получаемые с помощью прибора мастика-циограммы позволяют судить о характере движения нижней челюсти во время функции жевания (рис. 13. 34). Для подсчета жевательных движений при проведении функциональных проб используют метод Персина (рис. 13. 35).
|
|
|
13. 6. Методы лечения зубочелюстных аномалий
Для лечения зубочелюстных аномалий применяют следующие методы: аппаратурный, хирургический, Фи" зиотерапевтический и лечебную гимнастику.
Рис. 13. 35. Устройство для подсчета количества жевательных движений нижней челюсти.
1 — фиксирующее устройство; 2 — шарнир; 3 — магнит; 4 — рама; 5 — датчик герконо-вый; 6 — прибор для подсчета нижней челюсти во времени.
13. 6. 1. Аппаратурный метод лечения
Ортодонтические аппараты используют для лечения зубочелюстных аномалий, сохранения результата после его окончания и профилактики осложнений. Основным методом лечения аномалий зубочелюст-ной системы является аппаратур-
ный. Ортодонтические аппараты бывают внеротовыми, внутрирото-выми (одно- и двучелюстные). В зависимости от способа крепления их делят на съемные и несъемные.
Лечебные аппараты составляют самую большую группу. Действие их основано на использовании сил давления и тяги. В зависимости от источника нагрузок различают лечебные аппараты механического, функционального и комбинированного действия, а также моноблоковые и активаторы. Аппараты механического действия создают нагрузки на зубочелюстную систему благодаря свойствам используемого материала или конструкции. Для механических аппаратов характерно наличие винта, проволоки, лигатуры, резинового кольца. В них используют силу ортодонтического винта, упругие свойства проволоки и лигатуры, эластичные свойства резинового кольца. Благодаря собственному источнику усилия эти аппараты также называют активными. Величину и интенсивность нагрузки регулирует врач.
Функциональные аппараты действуют при сокращении мышц ЧЛО, т. е. во время функции, поэтому их называют пассивными. С помощью накусочных площадок, на-

 клонных плоскостей сила сокращения жевательных мышц передается на неправильно расположенный зуб, деформированный участок зубного ряда или челюсти. Аппараты комбинированного действия сочетают в себе активный и пассивный источники нагрузки.
клонных плоскостей сила сокращения жевательных мышц передается на неправильно расположенный зуб, деформированный участок зубного ряда или челюсти. Аппараты комбинированного действия сочетают в себе активный и пассивный источники нагрузки.
Применяемые в ортодонтических аппаратах силы характеризуются величиной, направлением и длительностью действия. Также важно место (точка) приложения силы. Развиваемая аппаратом или жевательной мускулатурой сила распределяется на разные участки зубочелю-стной системы, определяя таким образом величину нагрузки на единицу площади. Вопрос о количественном значении необходимой для ортодонтического лечения силы впервые в эксперименте на животных решил A. M. Шварц (1932). Он установил, что ортодонтическое давление не должно превышать капиллярное (20—26 г/см2). Оптимальным является давление (3, 5: 20-103 г/см2). При нагрузке 67 г/см2 обнаруживается травматическое сдавление пародонта. Однако в клинических условиях не удается измерить площадь пародонта перемещаемых зубов и давление на единицу площади. Поэтому о величине развиваемых нагрузок врач судит по своим оценкам и ощущениям пациента. У ребенка должно появиться чувство легкого неудобства, но не боли. В то же время отсутствие боли не является критерием физиологичности аппарата.
|
|
|
Перемещение зуба под действием одной приложенной в области коронки силы может быть поступательным и вращательным, в зависимости от места приложения и направления силы. Сила, направленная по продольной (вертикальной) оси зуба, приводит к внедрению или вытяжению. Приложение силы к коронке по касательной к ней обеспечивает поворот зуба вокруг вертикальной оси. Сила, приложен-
ная в области коронки перпендикулярно к продольной оси зуба (горизонтально), наклоняет коронку в направлении действия силы в сторону рта, преддверия, мезиально или дистально. При этом корень зуба отклоняется в противоположном направлении. Происходит вращательное перемещение зуба, которое в ортодонтии принято называть «наклонно-вращательным» [Калве-лисД. А., 1961].
Поступательное перемещение зуба в горизонтальной плоскости, или так называемое корпусное, можно осуществить с помощью двух параллельных противоположно направленных сил, а также силы и противоположно направленного вращательного момента, приложенных к коронке зуба, и аппаратами, которые создают с помощью тяги перемещение зуба по направляющей.
Существенна также продолжительность действия аппаратов. Одни из них действуют непрерывно, длительно или постоянно, другие — прерывисто (кратковременно). К первым относятся активные аппараты, поскольку они действуют до того времени, пока пружина или эластичное кольцо не потеряет упругости. Ко вторым принято относить функциональные аппараты, так как они действуют прерывисто, только в момент сокращения мышц. Однако такое деление не всегда истинно. По мнению Д. А. Калвелиса и других исследователей, использование малых и прерывистых сил более целесообразно.
Съемные и несъемные аппараты имеют преимущества и недостатки. Преимущества съемных аппаратов — удобство ухода за ними, соблюдение гигиены рта, возможность снять аппарат и проверить результаты лечения. Кроме этого, возможность многочисленных модификаций и комбинирования с внерото-выми аппаратами, техническая простота изготовления. Важно и то, что опорой может быть не только зуб,
н0 и альвеолярный отросток. Съемные аппараты легко дозировать, они позволяют осуществлять визуальный контроль. Недостатками их являются раздражающее действие базиса аппарата на слизистую оболочку вплоть до появления аллергической реакции, а также подверженность кариесу при несоблюдении гигиены рта. Кроме того, если ребенок не дисциплинирован, то съемный аппарат он может легко снять.
При применении съемных ортодонтических аппаратов следует помнить:
• последовательность воздействия на зубочелюстную систему и объем необходимых перемещений зубов, групп зубов планируется в начале лечения;
• успех лечения зависит от опорной части аппарата, которая противодействует активной (действующей силе) части аппарата;
• расширение одного зубного ряда может привести к значительному нарушению окклюзии зубных рядов;
• пластиночные аппараты не должны иметь много активных элементов, так как применение сил одновременно в различных направлениях может привести к их взаимному гашению;
• наряду с изменением формы и размера зубных рядов происходит изменение миодинамического равновесия мышц-антагонистов и синергистов.
Конечной целью расширения зубных рядов является нормализация их формы, создание места для аномально расположенных зубов, и самое главное — создание оптимальной окклюзии.
Преимущество несъемных аппаратов заключается в невозможности снять их без разрешения врача. Недостаток их в том, что под коронками, каппами, кольцами может рассасываться фосфат-це-
мент, задерживаться пища и развиваться кариес. Кариозный процесс может возникнуть в местах прилегания лигатур к коронкам зубов. Лигатуры могут раздражать межзубные сосочки, вызывать гингивит, краевой периодонтит.
В ортодонтических лечебных аппаратах различают действующую и опорную части, укрепляющие и вспомогательные элементы. Действующей частью механических аппаратов являются лигатура, пружины различных модификаций, часть базиса с винтом, прилегающая к деформированному участку, резиновое кольцо; в функциональных аппаратах — наклонная плоскость, накусочная площадка и другие элементы. Для крепления съемных аппаратов используются кламмеры разных конструкций: Адамса, круглые, многозвеньевые, стреловидные Шварца.
Несъемные аппараты укрепляют на зубах с помощью коронок, колец, капп. Поскольку аппараты фиксируются временно, опорные зубы не препарируют, что приводит к дизок-клюзии зубных рядов. По показаниям можно срезать жевательную поверхность или режущий край коронки, превратив ее в кольцо. Поскольку шейка ортодонтической коронки или кольца шире шейки зуба, край ортодонтических коронок, колец, капп не должен касаться десны, чтобы не повреждать ее. Коронки, кольца являются хорошей опорой для ортодонтических аппаратов. Ор-тодонтические коронки отличают от ортопедических. Зубы под ортодон-тические коронки не препарируются, граница коронки — до физиологической шейки зуба. Ортодонти-ческие коронки можно изготавливать путем их штамповки из гильз. Чаще всего используются ортодон-тические кольца, которые заводским путем изготавливают фирмы по типоразмерам. В наборы входят кольца, которые различают в зави-


 симости от стороны зубного ряда (левая или правая), а также от челюсти (верхней или нижней). Коронки (кольца) обычно фиксируются на висфат-цемент или иономер-це-мент. При плотном расположении зубов в зубном ряду для создания промежутков между зубами проводят ортодонтическую лигатурную сепарацию.
симости от стороны зубного ряда (левая или правая), а также от челюсти (верхней или нижней). Коронки (кольца) обычно фиксируются на висфат-цемент или иономер-це-мент. При плотном расположении зубов в зубном ряду для создания промежутков между зубами проводят ортодонтическую лигатурную сепарацию.
Перед примеркой и фиксацией коронки (кольца) на цемент лигатуру разрезают и выводят из межзубного пространства.
Вспомогательными элементами ортодонтических аппаратов являются крючки, штанги, трубки и касательные направляющие. Чаще их припаивают к несъемным аппаратам, реже — вваривают в пластмассовый базис.
Под действием силы ортодонтических аппаратов зубные ряды, челюсти подвергаются сжатию, растяжению и перемещению в различных направлениях. Согласно третьему закону Ньютона, при действии аппарата на определенные отделы зубочелюстной системы возникает противоположно направленная сила — сила противодействия. Для достижения желаемого лечебного эффекта необходимо создать устойчивость опорной части аппарата. Она зависит от площади этой части аппарата, устойчивости опорных зубов и величины развиваемой аппаратом нагрузки. Все это выражается величиной нагрузки на единицу опорной площади. Для предотвращения смещения опорных и перемещения неправильно расположенных зубов нагрузка на единицу опорной площади должна быть в 2—3 раза меньше, чем на единицу площади приложения силы. Наименьшая нагрузка создается в пластиночных аппаратах благодаря большой площади базиса. В несъемных аппаратах, фиксирующихся на коронках, кольцах и каппах, нагрузка на единицу опорной площади значительно больше, поэтому
опорные зубы должны быть устойчивыми, что обеспечивается сфор-мированностью корней и неповрежденным пародонтом. В связи с этим существуют возрастные показания к использованию аппаратов: до 10—12 лет применяют, как правило, пластиночные аппараты, а после окончания формирования корней опорных зубов — любые.
13. 6. 1. 1. Механически действующие (активные) аппараты
Активные аппараты подразделяются на внутри- и внеротовые.
|
|
|
