 |


Уравнение взаимного ориентирования
|
|
|
|
Одной из важнейших задач фотограмметрии является взаимное ориентирование снимков. Основание для ее решения было предложено С. Финстервальдером в 1899 г. как условие пересечения в пространстве пары соответственных лучей. Аналитическое решение задачи предложено профессором А.С. Скиридовым в 1928 г.
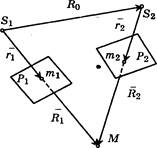
На рис. 9.9 изображена пара снимков Pi и Р2 и связки проектирующих лучей в том положении, которое они занимали в момент фотографирования. Любая пара соотвегственных лучей (например, Sinti и S2^2) пересекается и находятся в одной плоскости, проходящей через базис фотографирования S1S2. При изменении положения одной из связок проектирующих лучей соответственные лучи окажутся в разных плоскостях, в точке М не пересекутся, и модель разрушится.
Следовательно, условием взаимного ориентирования пары снимков является размещение соответственных векторов в одной базисной плоскости и их пересечение в одной точке. Математически это описывается условием компланарности векторов R\9 Д2 и До > т- е- условием равенства нулю их векторно-скалярного произведения, численно равного объему построенного на этих векторах параллелепипеда:
До х (Ri х Д2) = 0.
|
Полученное условие связывает направления трех векторов, любой из которых можно разделить на свой модуль, поэтому можно записать
До x(ri хг2) = 0. (9.10)
Выражение (9.10) инвариантно по отношению к системе координат, в которой
| Рис. 9.9. Условие взаимного ори ентирования снимков |
представлены векторы До, п, гг, и в самом общем случае его можно записать в матричном виде следующим образом:
J59
BX BY BZ
x\ y; z\ x\ y' z;
= o,
(9.11)
где, согласно рис. 9.4 и 9.8,
Вх = Б cost cos v, BY = В sin x cos v, Bz = Bsinv
(9.12)
Запишем условие (9.11) для рассмотренных выше систем элементов взаимного ориентирования.
|
|
|
В базисной системе элементов взаимного ориентирования (рис. 9.7) ось абсцисс координатной системы SiX'Y'Z' совпадает с базисом фотографирования, Вх = В, By = Bz = 0, и вместо (9.11) будем иметь:
| в | ||
| № | Y{ | Z[ |
| *2 | Y* | Z'2 |
о,
(9.13)
где в соответствии с (3.4)
| z |
\ = Цъ + Ъ'2ух - Щ1, Yi = 4*2 + b"2y2 - ЧЛ1 (9.14)
1 = ci*i + c2l/l — с3/> ^2 = С1Х2 + С2У2 — ^' J
Здесь В - базис фотографирования; X\?T\,Z'\ и Х'г^'г^'г ~ координаты точек т\ и Ш2 в системах SjX'iY'iZ'i и йг-ХГ^Уг^'г; &'*» c'j, b"j, c"i (i = 1, 2, 3) - направляющие косинусы, определяемые по формулам (3.8) с заменой углов а, со, х элементами взаимного ориентирования ct'i, oo'i = 0, x'i для левого снимка и а'г, со'г, Х*2 ДЛЯ правого.
Раскроем определитель (9.13) и разделим обе его части на величину Б:
Y'iZ'a - Г2^1=0. (9.15)
Умножив это уравнение на (-f/Z'iZ^), после несложных преобразований с учетом (3.21) получим еще одну форму записи уравнения взаимного ориентирования в базисной системе
У?
У°2=Я° = 0,
(9.16)
интерпретируемую как условие равенства нулю поперечных параллаксов точек трансформированных снимков, или условие равенства их трансформированных ординат. Последнее и объясняет отсутствие
Поперечных параллаксов при стереоскопическом наблюдении эпи-полярных изображений.
Приведем уравнение (9.15) к линейному виду, представив элементы взаимного ориентирования в явном виде. Для этого заменим в формулах (3.8) тригонометрические функции углов а, со и х их разложениями в ряды с удержанием членов первого порядка малости
<h - b2 = сз =!» bi = ~а2 = Ъ ci = _аз = а> с2 = ~&з = -<°
и подставим эти значений в (9.14) и (9.15) с заменой а, со, % на элементы взаимного ориентирование левого и правого снимков:
(Xi*i + J/i)(<*2*2 + го'гУг - Л - (Хг*2 + У 2 + ю'гЖа'Л " /) = ° •
Раскроем скобки, примем i/i = 1/2 = У и после простых преобразований получим уравнение взаимного ориентирования в линейном виде:
|
|
|
Ша>г _ Ы^ _ (/ + У1щ + XlXi _ ^ + д = 0. (9.17)
В линейно-угловой системе элементов взаимного ориентирования (рис. 9.8) принята система координат левого снимка S\xyz, составляющие базиса фотографирования определяются формулами (9.12), а фотограмметрические координаты точек левого снимка соответствуют измеренным. С учетом этого вместо (9.11) будем иметь, разделив первую строку на Вх: |1 tgx' tgv'/cosi'l
| = 0, (9.18) |
К у} ~/
Р^2 ^2 ^2
Где
Yi = Цх2 + Щу2 - Щ Z2 = c{x2 + <?2y2-c"sfj'
т' и v' - углы поворота и наклона базиса фотографирования в линейно-угловой системе элементов взаимного ориентирования; х\, z/i, Хг9 yi -координаты точки на левом и правом снимках; ftf, c\ (i = 1, 2, 3) - направляющие косинусы, определяемые по формулам (3.8) с заменой в них углов а, со и х элементами взаимного ориентирования Да, Дсо и Ах-Раскрыв определитель (9.18), после приведения его к линейному виду рассмотренным выше способом и полагая у\ = z/2 = У* получим
Зак. 344
. рх' + ^v' + ^/Дсс + (/ + ^)Асо + х2Ах - g = 0. (9.19)
Уравнения (9.17) и (9.19) пригодны для определения элементов взаимного ориентирования только плановых снимков. Для этого измеряют координаты и параллаксы как минимум пяти точек, составляют для каждой из них уравнение (9.17) или (9.19) и решают полученную систему уравнений.
|
|
|
