 |


Моделирование колебательных систем
|
|
|
|
ЛАБОРАТОРНАЯ РАБОТА №1
ВВЕДЕНИЕ В Simulink
Цель работы:
Ознакомиться с системой математического моделирования MATLAB/Simulink.
Краткие сведения о пакете
Система структурного моделирования Simulink предназначена для компьютерной реализации математических моделей динамических систем и устройств, представленных функциональной блок-схемой или системой уравнений. При этом возможны различные варианты моделирования: во временной области, в частотной области, с событийным управлением и т.д.
Для построения функциональной блок-схемы моделируемых устройств Simulink имеет обширную библиотеку блочных компонентов и удобный редактор блок-схем. Он основан на графическом интерфейсе пользователя и по существу является типичным средством визуально-ориентированного программирования. Используя библиотеку компонентов решающих блоков, пользователь с помощью мыши переносит нужные блоки из библиотеки в рабочее окно пакета Simulink и соединяет линиями связи входы и выходы блоков. Таким образом, создается блок-схема системы или устройства, то есть компьютерная модель.
Порядок работы с пакетом Simulink следующий:
1 На рабочем столе открываем пиктограмму MATLAB.
2 В открывшемся командном окне на панели инструментов нажимаем кнопку Simulink.
3 Открывается Simulink. Кроме рабочего окна с общим именем Untitled (“Безымянный”) открывается окно библиотеки Simulink с разделами:
- Sourses – источники;
- Sinks – приемники;
- Discrete – дискретные;
- Linear – линейные;
- Nonlinear – нелинейные
- Connections – связи;
- и т.д.
 |
Разработано совместно с асс. Радченко В.П.
Порядок выполнения работы:
В качестве примера рассмотрим демонстративный пример. Для этого:
|
|
|
1. Нажимаем кнопку Demos в меню Help.
2. В левом окошке выбираем пункт Simulink.
3. Двойным щелчком выбираем пункт Simple models (в версии 6.1 и выше пункт General).
4. В правом окне выбираем модель Spring-mass system simulation.
5. Запускаем ее командой Run или двойным щелчком.

Рисунок 1.1 - Окно Демонстрации “Spring–mass system simulation”
Данная модель реализует колебательную механическую систему с одной степенью свободы. Физическим аналогом модели является переменное по направлению движение, закрепленной пружиной к “прыгающей” заделке (слева) массы по гладкой поверхности с трением. Внешняя сила приложена к заделке. Модель реализует дифференциальное уравнение, описывающее движение кубика. В MATLAB в передаточных функциях вместо p – оператора Лапласа пишется s.
Рассмотрим блоки (слева направо):
Input – генератор, x1 – звено первого порядка, сумматор, усилитель,  – интегратор, Mux - смеситель (позволяет вывести более одного сигнала на Scope), Scope (Actual position) – осциллограф, Animation function - блок анимации.
– интегратор, Mux - смеситель (позволяет вывести более одного сигнала на Scope), Scope (Actual position) – осциллограф, Animation function - блок анимации.
Запуск моделирования осуществляется кнопкой  .
.
На экране – анимационная картинка, представленная на рис. 1.2:

Рисунок 1.2 - Движение груза на пружине
Двойной щелчок на Scope после запуска моделирования открывает окно Scope (рис. 1.3), в котором отображаются графики, характеризующие колебания правой массы во времени и знакопеременную внешнюю силу.
Остановить моделирование с помощью значка  и закрыть окна демонстрации.
и закрыть окна демонстрации.

Рисунок 1.3 - Графики, характеризующие работу системы
Ход работы:
1. На экране – открыть окно библиотеки и рабочее окно Simulink.
2. В окне библиотеки двойным щелчком раскрывается каждый из разделов. В разделе библиотеки Sourсes (Источники) выбираем генератор Signal Generator, перетаскиваем его в рабочее окно и закрываем окно Sourсes.
3. В разделе Sinks ( Приемники) выбираем осциллограф Scope, перетаскиваем в рабочее окно и закрываем окно Sinks.
|
|
|
4. В разделе Linear (Линейные блоки) или Math (для версии 6.1 и выше) выбираем блок усилитель– Gain с регулируемым коэффициентом усиления (КУ) и сумматор – Sum, а также интегратор– Integretor (в версии 6.1 и выше данный блок находится в разделе Continuous). Все блоки последовательно перетаскиваем в рабочее окно и закрываем окно Linear (Math).
5. В разделе Connections (Связи) или Signals & Systems (для версии 6.1 и выше) выбираем смеситель– Mux и перетаскиваем в рабочее окно.
6. В рабочем окне приступаем к соединению блоков. Схема модели должна иметь вид:
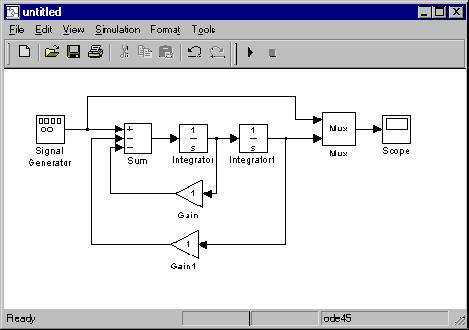 |
Рисунок 1.4 - Схема модели лабораторной работы
Копирование блока осуществляется путем перетаскивания с нажатой клавишей Ctrl. Поворот блока осуществляется путем выделения блока и нажатием комбинации клавиш Сtrl+F.
7. Перейдем к настройке системы. Открытие окна настройки блока осуществляется путем двойного щелчка. В блоке Signal Generator рассмотрим доступные нам сигналы. Выбираем Squre – частоту в Гц – 0.02. Смотрим, как система отреагирует на скачкообразное возмущение. Система не является колебательной.
8. Уменьшим КУ по внутреннему контуру (Gain). КУGain = 0.1, т.е. уменьшим демпфирующую силу в 10 раз. Моделируем. Имеем колебательную систему. Теперь нужно поменять собственную частоту, которую определяет нижний КУGain1. Увеличим его в 10 раз. Видим, что увеличилась частота и уменьшилась амплитуда колебаний.
9. В Signal Generator увеличим амплитуду в 5 раз. На внутреннем Gain вместо 0.1 сделаем 0.3 – увеличим коэффициент демпфирования.
Мы убедились, что частота колебаний регулируется усилителем на внешнем контуре, а затухание колебаний регулируется на внутреннем контуре.
10. Ознакомиться с демонстрационными примерами Tracking a bouncing boll, Simple pendulum simulation, Toilet bowl flushing animation и описать один из них по указанию преподавателя:
- назначение системы;
- состав модели;
- особенности движения системы.
ЛАБОРАТОРНАЯ РАБОТА №2
МОДЕЛИРОВАНИЕ КОЛЕБАТЕЛЬНЫХ СИСТЕМ
Цель работы:
1. Составить математические модели колебательных систем с одной степенью свободы и блок-схемы их набора в пакете Simulink для различных законов демпфирования.
2. Исследовать характер собственных и вынужденных колебаний систем под действием различных внешних сил и ненулевых начальных условий.
|
|
|
Теоретическая часть
Простейшая колебательная система (например, грузик на пружине, LC ‑ колебательный контур) имеет одну степень свободы и описывается обыкновенным дифференциальным уравнением первого порядка. Так простейшая одномассовая поступательная система описывается уравнением равновесия сил, действующих на подвижную массу m:
 , (2.1)
, (2.1)
где  - перемещение массы;
- перемещение массы;
 - сила инерции;
- сила инерции;
 - демпфирующая сила сопротивления движению, зависящая от скорости
- демпфирующая сила сопротивления движению, зависящая от скорости  ;
;
 - усилие пружины (восстанавливающая сила);
- усилие пружины (восстанавливающая сила);
 - внешняя сила.
- внешняя сила.
В зависимости от характера демпфирующей силы уравнение (2.1) движения принимает следующие формы:
1. В случае вязкого трения, характерного для механических крутильных систем, демпфирующая сила является линейной функцией скорости:
 , (2.2)
, (2.2)
где  - линейная сила вязкого трения.
- линейная сила вязкого трения.
2. В случае квадратичного закона трения, характерного для гидравлических систем, демпфирующая сила является квадратичной функцией скорости:
 , (2.3)
, (2.3)
где  - квадратичная демпфирующая сила.
- квадратичная демпфирующая сила.

а б в
Рисунок 2.1. Колебательная система:
а. с вязким линейным трением,
б. с вязким квадратичным трением,
в. с сухим трением.
3. В случае сухого трения, характерного для механических поступательных систем, демпфирующая сила является функцией знака скорости, а величина ее постоянна:
 , (2.4)
, (2.4)
где  - сила сухого трения.
- сила сухого трения.
На рис. 2.1 приведены примеры колебательных систем с вязким линейным, вязким квадратичным и сухим трением.
Свободные колебания системы возникают под действием ненулевых начальных условий ( ,
,  ), либо при скачкообразном приложении силы F(t). Свободные колебания затухают под действием демпфирующей силы, а характер затухания зависит от вида демпфирования (трения).
), либо при скачкообразном приложении силы F(t). Свободные колебания затухают под действием демпфирующей силы, а характер затухания зависит от вида демпфирования (трения).
Порядок составления структурной модели
Используя уравнения (2.2), (2.3), (2.4) построить блок-схему колебательной системы с различными демпфирующими силами. Для этого необходимо:
1. Разрешить дифференциальное уравнение относительно слагаемого со старшей производной.
2. С помощью цепочки сумматоров собрать модель правой части уравнения.
|
|
|
3. Используя цепочки из двух последовательно включенных интеграторов, получить переменные  и
и  .
.
4. С помощью усилителей с регулируемым коэффициентом передачи или соответствующих нелинейных блоков получить слагаемые правой части уравнения по п. 1 и подключить их к цепочке сумматоров.
Таблица 2.1
| № вар | m | b | c | 
| 
| № вар | m | b | c |
|
|
| 0.5 | 0.48 | ||||||||||
| 1.2 | 0.8 | 1.32 | 1.98 | ||||||||
| 1.2 | |||||||||||
| 1.25 | 0.25 | 2.7 | 1.2 | ||||||||
| 1.08 | 0.7 | ||||||||||
| 2.8 | 0.4 | 1.6 | 0.2 | ||||||||
| 1.35 | 1.8 | 1.44 | |||||||||
| 0.28 | 0.8 | ||||||||||
| 1.4 | 4.5 | ||||||||||
| 1.8 | 2.5 | ||||||||||
| 0.6 | 0.9 | 1.6 | 0.32 | ||||||||
| 1.75 | 1.12 |
5. Проверить блок-схему - в каждом замкнутом контуре число перемен знака должно быть нечетным.
6. Внешнюю силу F(t) моделировать соответствующим генератором.
7. В полученной схеме установить коэффициенты в соответствии с вариантом (табл. 2.1).
8. Набрать модель в рабочем окне SIMULINK.
Порядок выполнения работы
1. Составить и набрать структурную модель колебательной системы с вязким трением (по уравнению (2.2)). Задать:
· возмущение - единичный скачок;
· начальные условия - нулевые;
· метод моделирования - Рунге-Кутта;
· точность - 0.01;
· длительность моделирования Tk = 50 с.
2. Запустить моделирование командой “Start” или “Счет” (функциональная клавиша F3), по окончании вычисления вывести на экран график процесса x(t) командой “Грф” (F6) и зарисовать.
3. Изменяя коэффициент демпфирования (уменьшая в 2, 4, 10 раз), получить графики соответствующих переходных процессов и зарисовать. Сделать вывод о влиянии коэффициента демпфирования на затухание колебаний.
4. Для заданного коэффициента демпфирования исследовать влияние коэффициента передачи во внешнем контуре на частоту собственных колебаний системы. Для этого увеличивать и уменьшать указанный коэффициент в 2 и 4 раза. Сделать выводы.
5. Исследовать влияние ненулевых начальных условий на движение системы. Для этого установить исходные значения коэффициентов, а сигнал на выходе генератора установить равным 0. Задать последовательно начальные условия и . Зарисовать графики переходных процессов при ненулевых начальных условиях. Сделать выводы.
6. Исследовать поведение системы с вязким трением при подключении в виде возмущающего воздействия синусоидального сигнала  при нулевых начальных условиях в районе резонанса. Для этого необходимо найти резонансную частоту системы
при нулевых начальных условиях в районе резонанса. Для этого необходимо найти резонансную частоту системы  .
.
|
|
|
 (2.5)
(2.5)
Определить амплитуду установившихся колебаний при частоте возмущающего сигнала 0.5· , , 2· . Сделать выводы.
7. Исследовать систему с вязким трением при подключении в виде возмущающего воздействия меандра (прямоугольных периодических колебаний) при нулевых начальных условиях. Зарисовать процесс x(t) при частоте возмущающего сигнала 0.25· , , 4· . Описать характер движений системы. Сделать выводы.
8. Исследовать колебательные системы с вязким линейным, с вязким квадратичным и с сухим трением (уравнения (2.2), (2.3), (2.4) соответственно) с нулевыми начальными условиями при единичном возмущающем воздействии. Зарисовать полученные выходные характеристики и сделать вывод о влиянии различных демпфирующих сил на вид переходной характеристики.
Контрольные вопросы
1. По каким законам уменьшается амплитуда колебаний при вязком линейном трении, при вязком квадратичном трении и при сухом трении?
2. Как изменяется амплитуда вынужденных колебаний в зависимости от частоты возмущающей силы?
3. Сколько собственных частот имеют колебательные системы, описываемые обыкновенными уравнениями 3-го, 4-го, 5-го, 6-го порядка?
4. Как изменяется затухание колебаний при изменении коэффициента демпфирования?
5. Как изменится собственная частота колебательной системы при изменении массы?
Литература
1. Пановко Я.Г. Введение в теорию колебаний. - М.: Наука, 1991.
2. Тимошенко С.П. Колебания в инженерном деле. - М.: Физматгиз, 1959.
ЛАБОРАТОРНАЯ РАБОТА №3
|
|
|
