 |


Последовательное соединение автоматов
|
|
|
|
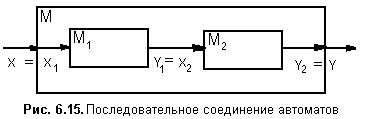
Пусть автоматы М1 и М2 соединены, как показано на рис. 6.15.
При этом X=X1, Y1=X2, Q = (Q1ÄQ2) и Y=Y2.
Функционирование автомата M может быть описано системой:
 q[t+1]=(q1[t+1]; q2[t+1])=(y1(q1[t]; x1[t]); y2(q2[t]; j1(q1[t]; x1[t])));
q[t+1]=(q1[t+1]; q2[t+1])=(y1(q1[t]; x1[t]); y2(q2[t]; j1(q1[t]; x1[t])));
y[t]=j(q[t]; x[t])=j2(q2[t]; j1(q1; x1).
По данным таблиц 6.27, 6.28 и 6.29 составим таблицу поведения автомата М (см. таблицу 6.30).
Последовательное соединение автоматов - некоммутативная операция. При смене мест автоматов М1 и М2 меняется структура автомата М и его поведение.
| Пусть М1 находился в состоянии q11, а на его вход подан сигнал x11. М1 формирует на выходе сигнал y11=x21 и переходит в состояние q12.. М2 находился в состоянии q21, по сигналу x21 переходит в состояние q21 и формирует на выходе сигнал y21. Следовательно, автомат М переходит из состояния q1=(q11; q21) в состояние q3=(q12; q21) и генерирует на выходе сигнал y21. | таблицу 6.30 | |
| Автомат М | ||
| qÎQ | xÎX | |
| x11 | x12 | |
| q1 | q3; y21 | q1; y22 |
| q2 | q4; y21 | q1; y22 |
| q3 | q6; y21 | q3; y21 |
| q4 | q6; y21 | q4; y21 |
| q5 | q5; y21 | q1; y21 |
| q6 | q6; y21 | q2; y21 |
Параллельное соединение автоматов
Параллельное соединение автоматов возможно в четырех вариантах (см. рис. 6.16).

Различие схем заключено в формировании входных и выходных сигналов.
Для схем а) и с), множество сигналов на входе автомата М определяется парой входных сигналов автоматов М1 и М2, то есть сигнал на входе есть вектор xi= (x1j; x2k)Î(X1ÄX2) (см. таблицу 6.31).
Для схем а) и b) множество сигналов на выходе автомата М определяется парой выходных сигналов автоматов М1 и М2, то есть сигнал на выходе есть вектор yi= (y1j; y2k)Î(Y 1ÄY2) (см. таблицу 6.32).
Для схем b) и d) сигналы на входе автомата М равны входным символам автоматов М1 и М2 при условии X1=X2=X.
Для схем с) и d) значения сигналов на выходе автомата М определяются оператором g, то есть y=g(y1i, y2j).
|
|
|
.
Таблица 6.31
| x1 | x2 | x3 | x4 | x5 | x6 |
| (x11; x21) | (x11; x22) | (x11; x23) | (x12; x21) | (x12; x22) | (x12; x23) |
Таблица 6.32
| y1 | y2 | y3 | y4 | y5 | y6 |
| (y11;y21) | (y11;y22) | (y12;y21) | (y12;y22) | (y13;y21) | (y13;y22) |
Система рекуррентных соотношений для схемы а) есть:

Это позволяет вычислить каждую позицию таблицы 33 поведения автомата М.
Например, если дано q1=(q11, q21) и x4=(x12, x21), то
 q=(y1(q11, x12); y2(q21, x21))= (q11, q21)= q1;
q=(y1(q11, x12); y2(q21, x21))= (q11, q21)= q1;
y=(j(q11, x12); j(q21, x21))= (y13, y21)=y5.
(см. таблицы 27-29, 31, 32).
| Таблица 6.33 | ||||||
| текущее состояние | символы входного алфавита xÎX | |||||
| x1 | x2 | x3 | x4 | x5 | x6 | |
| q1 | q3; y1 | q4; y1 | q3; y2 | q1; y5 | q2; y5 | q1; y6 |
| q2 | q4; y1 | q4; y1 | q3; y2 | q2; y5 | q2; y5 | q1; y6 |
| q3 | q5; y1 | q6; y1 | q5; y2 | q3; y1 | q4; y1 | q3; y2 |
| q4 | q6; y1 | q6; y1 | q5; y2 | q4; y1 | q4; y1 | q3; y2 |
| q5 | q5; y1 | q6; y1 | q5; y2 | q1; y3 | q2; y3 | q1; y4 |
| q6 | q6; y1 | q6; y1 | q5; y2 | q5; y3 | q2; y1 | q1; y4 |
Для схемы b) на входе автомата М есть x1=x11=x21, x2=x12=x22. Тогда система рекуррентных соотношений есть:

Это позволяет вычислить каждую позицию таблицы 34 поведения автомата М.
Например, если дано q1=(q11, q21) и x5=(x12, x22), то
q=(y1(q11, x12); y2(q21, x22))= (q11, q22)= q2;
y=(j(q11, x12); j(q21, x22))= (y13, y21)=y5.
(см. таблицы 27-29, 31, 32).
Таблица 6.34
| текущее состояние | символы входного алфавита xÎX | |
| x1 | x5 | |
| q1 | q3;y1 | q2;y5 |
| q2 | q4;y1 | q2;y5 |
| q3 | q5;y3 | q1;y1 |
| q4 | q6;y3 | q4;y1 |
| q5 | q5;y1 | q2;y1 |
| q6 | q6;y1 | q2;y1 |
Для схемы с) выход автомата М формируется функцией
y=g(y1i; y2j).
Рекуррентные соотношения для такого автомата M есть:

Оператор g формируется поставленной задачей.
Это позволяет вычислить каждую позицию таблицы 35 поведения автомата М.
Например, если дано q1=(q11, q21), x5=(x12, x22) и если аргумент функции g содержит символ y21, то на выходе автомата М – формируется символ от автомата М1, если - y22, то - символ от автомата М2, то
q=(y1(q11, x12); y2(q21, x22))= (q11, q22)= q2;
y=g(j(q11, x12); j(q21, x22))= (y13, y21)=y13.
Таблица 6.35
| текущее состояние | символы входного алфавита xÎX | |||||
| x1 | x2 | x3 | x4 | x5 | x6 | |
| q1 | q3;y11 | q4;y11 | q3;y22 | q1;y13 | q2;y13 | q1;y22 |
| q2 | q4;y11 | q4;y11 | q3;y22 | q2;y13 | q2;y13 | q1;y22 |
| q3 | q5;y11 | q6;y11 | q5;y22 | q3;y11 | q4;y11 | q3;y22 |
| q4 | q6;y11 | q6;y11 | q5;y22 | q4;y11 | q4;y11 | q3;y22 |
| q5 | q5;y11 | q6;y11 | q5;y22 | q1;y12 | q2;y12 | q1;y22 |
| q6 | q6;y11 | q6;y11 | q5;y22 | q5;y12 | q2;y11 | q1;y22 |
Для автомата по схеме d) сигнал на входе формируется также как для автомата по схеме b), а сигнал на выходе также как для автомата по схеме с).
|
|
|
Система рекуррентных соотношений есть: 
Например, если дано q1=(q11, q21), x5=(x12, x22) и если аргумент функции g содержит символ y21, то на выходе автомата М – формируется символ от автомата М1, если - y22, то - символ от автомата М2:
q=(y1(q11, x12); y2(q21, x22))= (q11, q22)= q2;
y=g(j(q11, x12); j(q21, x22))= (y13, y21)=y13.
Таблица 6.36
| текущее состояние | символы входного алфавита xÎX | |
| x1 | x5 | |
| q1 | q3;y11 | q2;y13 |
| q2 | q4;y11 | q2;y13 |
| q3 | q5;y12 | q1;y11 |
| q4 | q6;y12 | q4;y11 |
| q5 | q5;y11 | q2;y11 |
| q6 | q6;y11 | q2;y11 |
Обратная связь автоматов
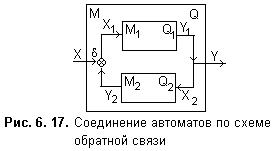
Автоматы М1 и М2 соединены так, как показано на рис. 6.17. При этом в обратной связи чаще всего применяют автомат Мура, поведение которого есть:  при j2=1.
при j2=1.
Пусть таблицей 6.37 дано описание автомата Мура.
Таблица 6.37
| текущее состояние | символы yÎY | Выход М2 | ||
| y11=y1=x21 | y12=y2=x22 | y13=y3=x23 | ||
| q21 | q21 | q22 | q21 | y21 |
| q22 | q22 | q22 | q21 | y22 |
Для автомата М имеем Q=(Q1ÄQ2), Y1=X2=Y и d:(XÄY2)®X1.
Система рекуррентных соотношений для описания автомата М: 
Оператор d: (XÄY2)®X1 формируется поставленной задачей.
Пусть он задан таблицей 6.38.
Таблица 6.38
| символ xÎX | символ y2iÎY2 | |
| y21 | y22 | |
| x1 | x11 | x12 |
| x5 | x12 | x11 |
Поведение автомата М описано таблицей 6.39
В таблице символом "*" обозначены позиции, для которых нет элементов в области определения оператора d.
Например, согласно таблице 6.38, если q1=(q11, q21) и x11=(x1, y21) или x11=(x5, y22), то
 q=(y1(q11, x11); y2(q21, y11=x21))= (q12, q21)= q3;
q=(y1(q11, x11); y2(q21, y11=x21))= (q12, q21)= q3;
y=j1(q11; x11))=y11 ,
или
 q=(y1(q11, x11); y2(q21, y22))=(q12, *)= *;
q=(y1(q11, x11); y2(q21, y22))=(q12, *)= *;
y=j1(q11; x11)=y11 (см. таблицы 27-29, 31, 32).
| Таблица 6.39 | ||||
| текущее состояние | аргумент функции d(x;j2(q2)) | |||
| (x1; y21) | (x1; y22) | (x5; y21) | (x5; y22) | |
| q1=(q11; q21) | q3; y11 | *; y11 | q1; y13 | *;y13 |
| q2=(q11; q22) | * y11 | q1; y11 | *; y13 | q4; y13 |
| q3=(q12; q21) | q6; y12 | *; y11 | q3; y11 | *; y11 |
| q4=(q12; q22) | *; y12 | q4; y11 | *; y11 | q6; y11 |
| q5=(q13; q21) | q5; y11 | *; y11 | q1; y11 | *; y11 |
| q6=(q13; q22) | *; y11 | q2; y11 | *;y11 | q6; y11 |
Всякий автомат в синхронном режиме может быть реализован сетью, состоящей из комбинационных автоматов и элементов задержки. Автомат Мура формирует задержку на один такт
Сумма автоматов
При асинхронном режиме работы автоматов M1 и M2 внутренние состояния сети принадлежат множеству Q=(Q1ÈQ2).
Таблица 6.40
| текущее состояние | символы входного алфавита xÎX=(X1ÈX2) | ||||
| x11 | x12 | x21 | x22 | x23 | |
| q11 | q12;y11 | q11;y13 | — | — | — |
| q12 | q;y12 | q12;y11 | — | — | — |
| q | q;y11 | q11;y11 | q;y21 | q22;y21 | q;y22 |
| q22 | — | — | q22;y21 | q22;y21 | q;y22 |
|
|
|
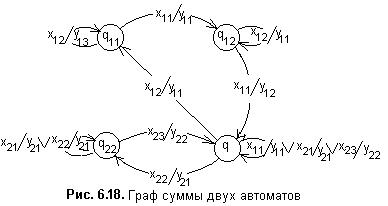
Для того, чтобы из двух автоматов сформировать сеть, необходимо определить заключительное состояние qk первого в очереди автомата, начальное состояние q0 следующего в очереди автомата и соединить эти состояния. В таблице 6.40 таким состоянием является q, принадлежащее двум автоматам.
|
|
|
