 |


Рабочие характеристики асинхронного двигателя
|
|
|
|
При снятии рабочих характеристик необходимо поддерживать постоянным подводимое к двигателю напряжение U1=Uн=const.
Изменяя момент на валу двигателя с помощью изменения тока нагрузки вспомогательного генератора Ia, таким образом, чтобы ток статора АД изменялся от тока холостого хода двигателя Iон до I1 » 1,1×Iн.
В указанных пределах изменения тока статора снимают 5-6 точек. При этом измеряют токи I1л, I2л, I3л, показания ваттметров a1, a2, число колебаний стрелки амперметра А3 в цепи ротора n за фиксированное время t. Данные испытания записывают в табл. 2.5.
Таблица 2.5
Опытные данные при снятии рабочих характеристик АД.
U1=Uн=const; f1=fн =const;
| № п/п | I1л | I2л | I3л | a1 | a2 | n | t |
| дел. | дел. | дел. | Дел. | дел. | число колеб. | cек. | |
| СА= А/дел. | Сw= Вт/дел. | ||||||
Результаты испытания обрабатываются следующим образом. Ток статора определяют как среднее арифметическое из трех измеренных значений
 , (2.20)
, (2.20)
где СА – цена деления амперметра.
Подводимую к двигателю мощность определяют по формуле
Р1=(a1 +a2) Сw, (2.21)
где Сw – цена деления ваттметров.
Коэффициент мощности cos j определяют по формуле
 (2.22)
(2.22)
и проверяют по табл. (1.1).
Суммарные потери
åр = рмг + рмх + рэл1 + рэл2 + рдоб. (2.23)
Магнитные потери (рмг) и механические потери (рмх) определяются из опыта холостого хода при Uн считаются постоянными при снятии рабочих характеристик, т.к. U1=const и n –мало изменяется (n» const), следовательно,
рмг + рмх= const (2.24)
Электрические потери рэл1 при соединении обмотки статора по схеме треугольника равны: рэл1 = I1 2 r1 75. (2.25)
- r1 75 - сопротивление обмотки статора при t o = 75oC.
Электрические потери рэл2 обмотки ротора вычисляются через электромагнитную мощность Pэм, передаваемую через воздушный зазор d со статора на ротор, и скольжение s:
|
|
|
рэл2 = s × Pэм, (2.26)
где Рэм = Р1 - (рэл1 + рмг), (2.27)
 . (2.28)
. (2.28)
Добавочные потери рд при номинальном режиме принимаются равными
рдн = 0,005 × Р1н, (2.29)
а при токе статора, отличном от Iн, пересчитываются по формуле:
 . (2.30)
. (2.30)
Полезная мощность двигателя
Р2 = Р1 - åр. (2.31)
Полезный момент на валу двигателя:
М2 = Р2/W (Н×м), (2.32)
где W=2p×n –угловая механическая частота вращения ротора,
n = n1 (1-s) частота вращения ротора в об/с;
n1= f1 / p –частота вращения поля статора в об/с;
р - число пар полюсов.
М2=  (кГм), (2.33)
(кГм), (2.33)
где n1= (f1 × 60)/p - синхронная частота вращения поля статора в об/мин;
P2 – мощность в Вт.
Коэффициент полезного действия h двигателя можно определить через отдельные потери:
 . (2.34)
. (2.34)
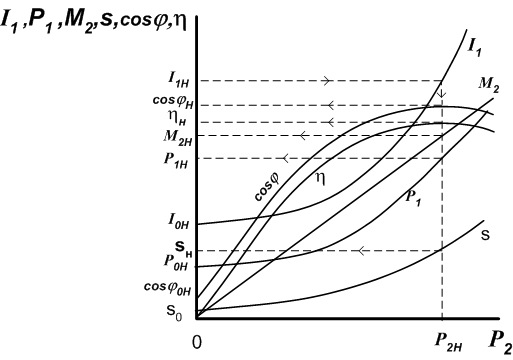
Результаты расчета рабочих характеристик двигателя заносят в табл.2.6, по данным которой строят зависимости, изображённые на рис.2.7.
Таблица 2.6.
Расчетные данные при снятии рабочих характеристик АД.
U1=Uн= В; f1=fн = Гц; pмг = Вт; pмх = Вт;
| № п/п | I1 | P1 | cosj | s | pэл1 | Рэм | pэл2 | pд | åр | Р2 | М2 | h |
| А | Вт | Вт | КГм | |||||||||
|
Полученные зависимости можно объяснить следующим образом.
Зависимость M2 = f(P2) практически прямая линия, М2 ~ Р2, а частота вращения n в опыте практически постоянна, т.к. скольжение s меняется мало (от s» 0 до sн =4¸7%).
Скольжение s является одной из наименее точно измеряемых величин, поэтому обычно в опыте наблюдается большой разброс точек. При построении зависимости s = f (P2) следует руководствоваться тем, что в пределах до номинальной нагрузки связь между M2 и s практически линейна. Это видно из формулы для момента [6]:
 . (2.35)
. (2.35)
Если пренебречь сопротивлением r1, x1, x2¢, которые меньше, чем r2¢, то
 . (2.36)
. (2.36)
|
|
|
Коэффициент мощности cos j при Р2 = 0 (режим холостого хода) имеет небольшое значение cos j0н , т.к. преобладает индуктивная составляющая тока. С ростом Р2 увеличивается активная нагрузка и cos j растет практически пропорционально Р2 , при дальнейшем увеличении Р2 , вследствие влияния насыщения cos j практически не изменяется, а затем несколько уменьшается.
Известно [1], что максимум h наступает, когда потери постоянные, не зависящие от тока нагрузки I1 (это потери рмг и рмх), равны потерям переменным, зависящим от I12 (это электрические потери обмоток статора и ротора и добавочные).
При малых значениях Р2 преобладают потери постоянные и h растет пропорционально Р2, при дальнейшем росте Р2 увеличиваются электрические потери и h замедляет рост, и в дальнейшем по этой причине h начинает уменьшаться.
Подводимая мощность P1=P2 /h при малых нагрузках изменяется незначительно, т.к. h меняется пропорционально Р2 , а при нагрузках близких к номинальной h= const и Р1 изменяется пропорционально Р2.
При малых значениях Р2 преобладает реактивная составляющая тока I1, и с увеличением мощности Р2 ток I1 растёт незначительно, при дальнейшем увеличении Р2 преобладает активная составляющая тока и зависимость I1=f(P2) становится практически линейной.
|
|
|
