 |


Цифровая модель скорректированной системы при отработке ступенчатого сигнала при минимальной нагрузке на управляемый привод
|
|
|
|
На рис. 3.1 приведена цифровая модель скорректированной системы при отработке ступенчатого сигнала при минимальной нагрузке на управляемый привод, разработанная в программном пакете MATLAB версии 7.3.
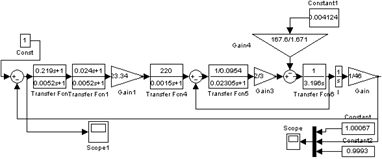
Рис. 3.1. Цифровая модель скорректированной системы при отработке ступенчатого сигнала при минимальной нагрузке на управляемый привод
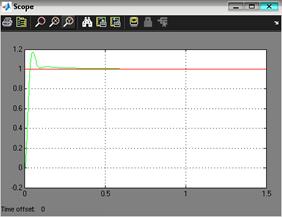
Рис. 3.2. Реакция выхода системы на единичный ступенчатый сигнал при минимальной нагрузке
По графику (рис. 3.2) найдем установившееся и максимальное значения  :
:

Расчетное выражение для перерегулирования:
 . (3.1)
. (3.1)
Для определения время регулирования  построим «коридор»:
построим «коридор»:
 . (3.2)
. (3.2)
Определим прямые показатели качества желаемой системы при минимальной массе нагрузки на проектируемый привод и сравним с соответствующими значениями, заданными в ТЗ:
Требования ТЗ:
 ,
,
 .
.
Реальные значения показателей определим по формулам 3.1 – 3.2:
 ,
,
 .
.
Границы коридора:  ,
, 
Статическую ошибку системы можно определить по графику ошибки, представленном на рис. 3.3.
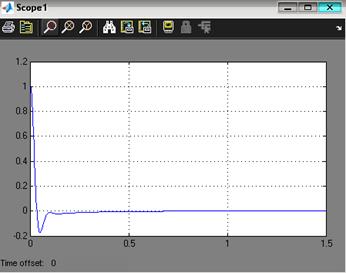
Рис. 3.3. Ошибка системы при отработке ступенчатого сигнала при минимальной массе нагрузки на управляемый привод
В ТЗ определена статическая допустимая погрешность:  .
.
 . (3.3)
. (3.3)
Реальное значение ошибки:  .
.
Цифровая модель скорректированной системы при отработке ступенчатого сигнала при максимальной нагрузке на управляемый привод
Цифровая модель скорректированной системы при отработке ступенчатого сигнала при максимальной массе нагрузки на управляемый привод представлена на рис. 3.4.
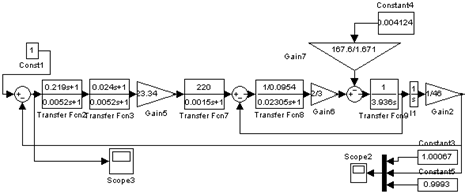
Рис. 3.4. Цифровая модель скорректированной системы при отработке ступенчатого сигнала при максимальной нагрузке на управляемый привод
|
|
|
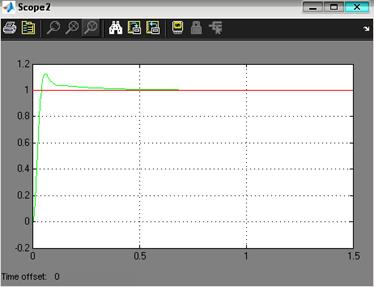
Рис. 3.5. Реакция выхода системы на единичный ступенчатый сигнал при максимальной нагрузке
По графику (рис. 3.5) найдем установившееся и максимальное значения  :
:

Реальные значения показателей:
 ,
,
 .
.

Рис. 3.6. Ошибка системы при отработке ступенчатого сигнала при максимальной массе нагрузки на управляемый привод
Результаты моделирования приведены в приложении 5.
Реальное значение ошибки:  .
.
Требование ТЗ к статической точности:  .
.
Проанализировав найденные показатели качества скорректированной системы, можно сделать, что полученная скорректированная система удовлетворяет заданным требованиям к качеству переходного процесса и статической точности, как при минимальной, так и при максимальной массе нагрузки на управляемый привод.
Модель желаемой системы при отработке выбранной траектории
Цифровая модель скорректированной системы при отработке выбранной траектории движения при минимальной нагрузке на управляемый привод
На рис. 3.7 представлена цифровая модель скорректированной системы при отработке выбранной траектории движения при минимальной массе нагрузки, построенная в программной среде MATLAB.

Рис. 3.7. Цифровая модель скорректированной системы при отработке программной траектории при минимальной нагрузке на управляемый привод
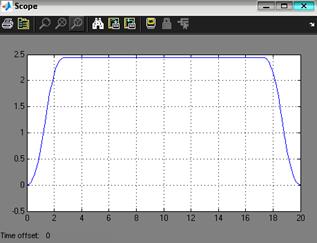
Рис. 3.8. Реакция выхода системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод
Динамическую ошибку системы определим по графику ошибки, представленном на рисунке 3.9.

Рис. 3.9. Ошибка системы при отработке программной траектории движения при минимальной массе нагрузки на управляемый привод

Реальное значение ошибки: 
Требование ТЗ к динамической точности:  .
.
|
|
|
