 |


Основные положения, выносимые на защиту 11 глава
|
|
|
|
На рисунке 4.2.1 представлена блок-схема приемной части системы наклонного зондирования "Обрыв".
На рисунке обозначено:
РПУ – радиоприемное устройство;
БЗ – блок защиты от сосредоточенных по спектру помех;
ГШС – генераторы широкополосных сигналов;
ОГ – опорный генератор;
К – ключи;
Х – смесители сигналов;
УПФ – узкополосные фильтры промежуточной частоты;
ФВ – фазовращатель;
Д – амплитудный детектор;
ФД – фазовый детектор;
ФНЧ – фильтры нижних частот;
АР – аппаратура регистрации.
| РПУ "Брусника" |
| БЗ |
| Х |
| Х |
| Х |
| ГШС 0 |
| ГШС 1 |
| ГШС 2 |
| ФНЧ |
| Д |
| АР |
| ОГ |
| ФД |
| ФД |
| ФНЧ |
| ФНЧ |
| ФНЧ |
| ФНЧ |
| ФД |
| ФД |
| К 1 |
| К 2 |
| ФВ 900 |
| АР |
| АР |
| АР |
| АР |
| АР "Терек" |
| УПФ |
| УПФ |
| УПФ |
Рисунок 4.2.1. Блок-схема приемной части системы
наклонного зондирования "Обрыв"
В качестве опорных генераторов на передающем и приемном концах радиолинии использовались высокостабильные рубидиевые эталоны частоты имеющие суточную нестабильность 1∙10-11, что давало возможность регистрировать
доплеровские отклонения частоты сигналов в отдельно взятых лучах декаметрового канала связи во всем диапазоне частот с точностью до тысячных долей герца.
РПУ "Брусника" было модернизировано таким образом, что полоса пропускания его усилительного тракта была расширена до 100 кГц. Блок защиты представлял собой 40 параллельно включенных между собой каналов с полосой пропускания по частоте каждого из них 2500 Гц и сопряженных таким образом, что результирующая амплитудно-частотная характеристика БЗ имела незначительные отклонения от прямоугольности, a его фазо-частотная характеристика имела практически линейный характер. Все ГШС генерировали абсолютно одинаковые квазислучайные последовательности. ГШС0 был способен медленно перестраиваться за счет изменения на его входе значения опорной частоты. С помощью ключей К1 и К2 ГШС1 и ГШС2 синхронизировались в заданные моменты времени с перестраиваемым ГШС0. На выходах УПФ в моменты совпадения фаз принимаемого сигнала и сигналов с выходов ГШС имели место гармонические сигналы-свертки, которые соответствовали значениям импульсной реакции в заданные моменты времени. С выхода ФНЧ амплитудного детектора включенного в цепь, соответствующую ГШС0 поступал сигнал, который являлся огибающей импульсной реакции канала связи. С выходов ФНЧ фазовых детекторов, которые включены в цепи, соответствующие ГШС1 и ГШС2 поступали значения квадратур выборок импульсной реакции канала связи, взятых в конкретные моменты времени. Результаты измерений значений импульсной реакции канала связи регистрировались с помощью самописцев и первого в то время отечественного цифрового магнитофона "Терек", который в последствии позволил автоматизировать обработку результатов измерений с помощью ЭВМ.
|
|
|
На рисунке 4.2.2 приведен внешний вид системы "Обрыв".
На рисунке 4.2.3 в качестве примера приведены огибающие четырех импульсных реакций канала связи, полученных последовательно во времени с периодом 90 с на трассе Ленинград-Омск летом 1968 г.
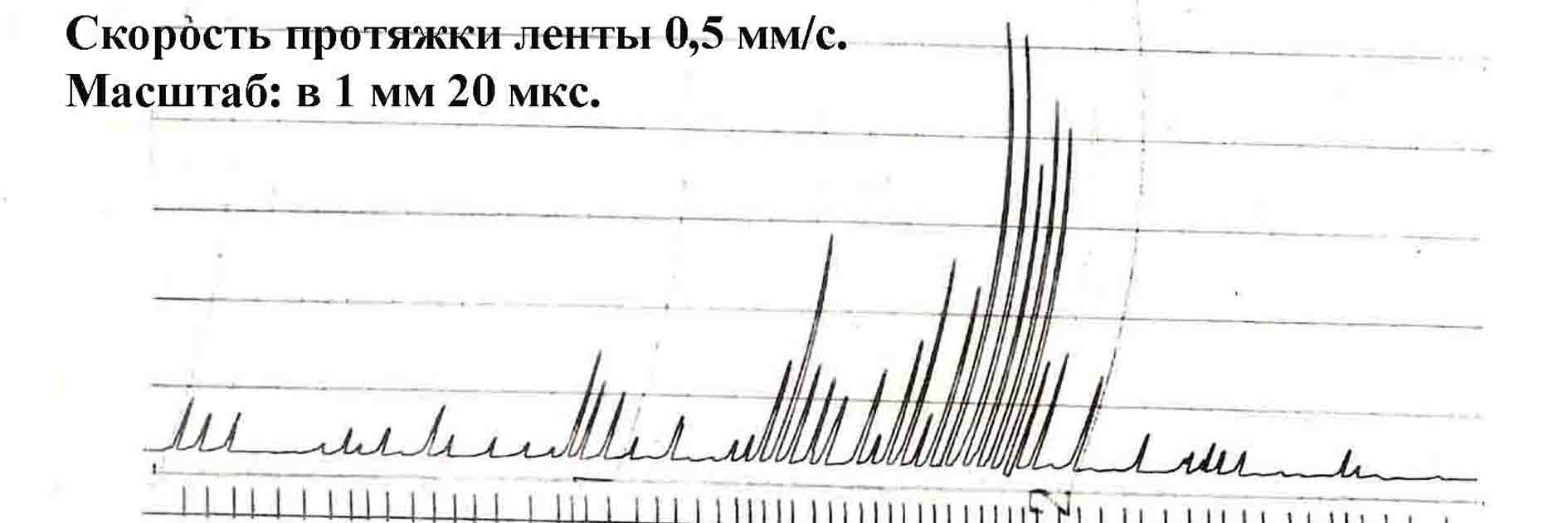
На рисунке 4.2.4 показано изменение огибающей импульсной реакции, соответствующей одному лучу. Период обзора этого луча составлял 3 с.

|
Рис. 4.2.2. Внешний вид системы наклонного зондирования ионосферы "Обрыв"
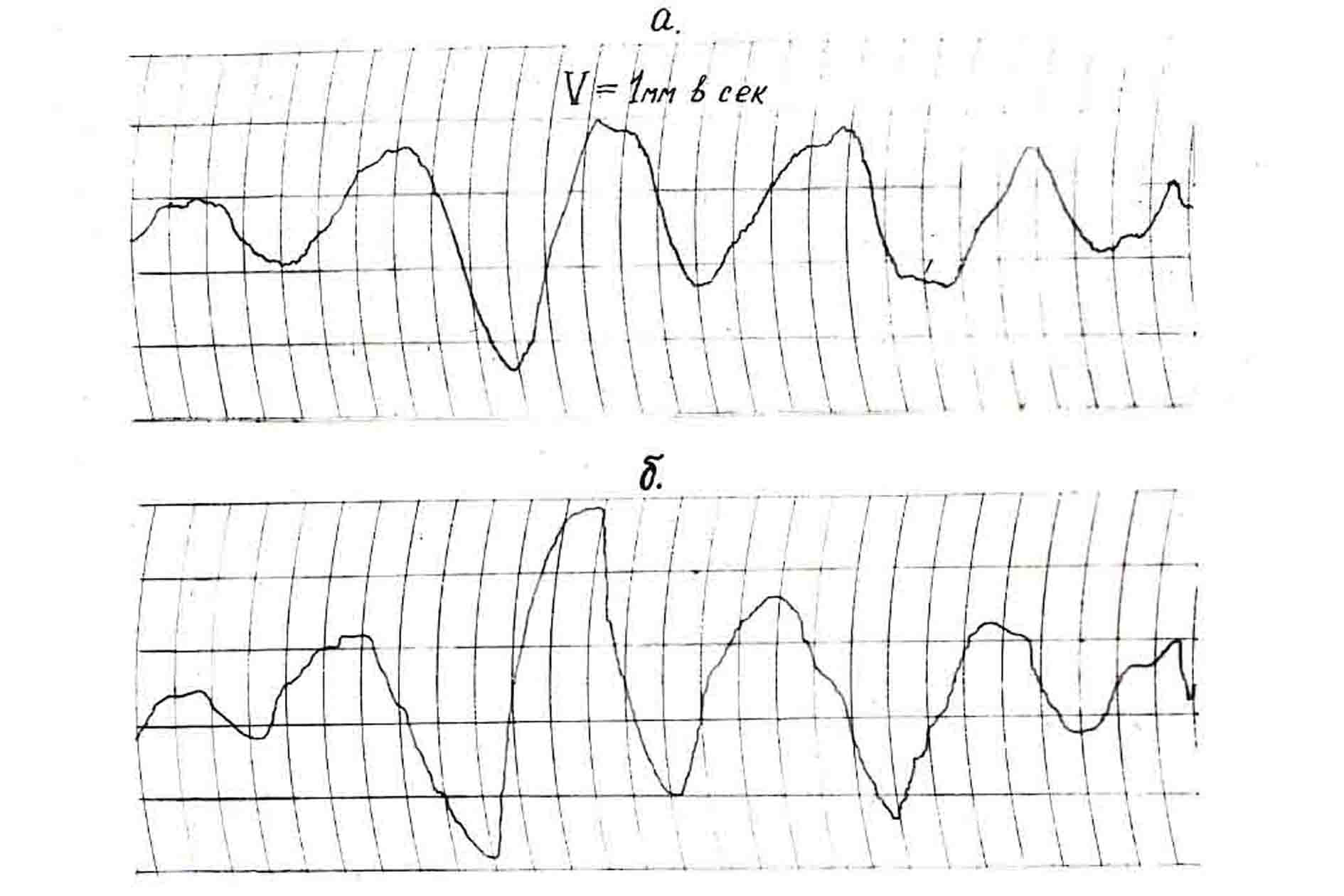
На рисунке 4.2.5 в качестве примера приведены временные зависимости квадратур одного отсчета импульсной реакции.
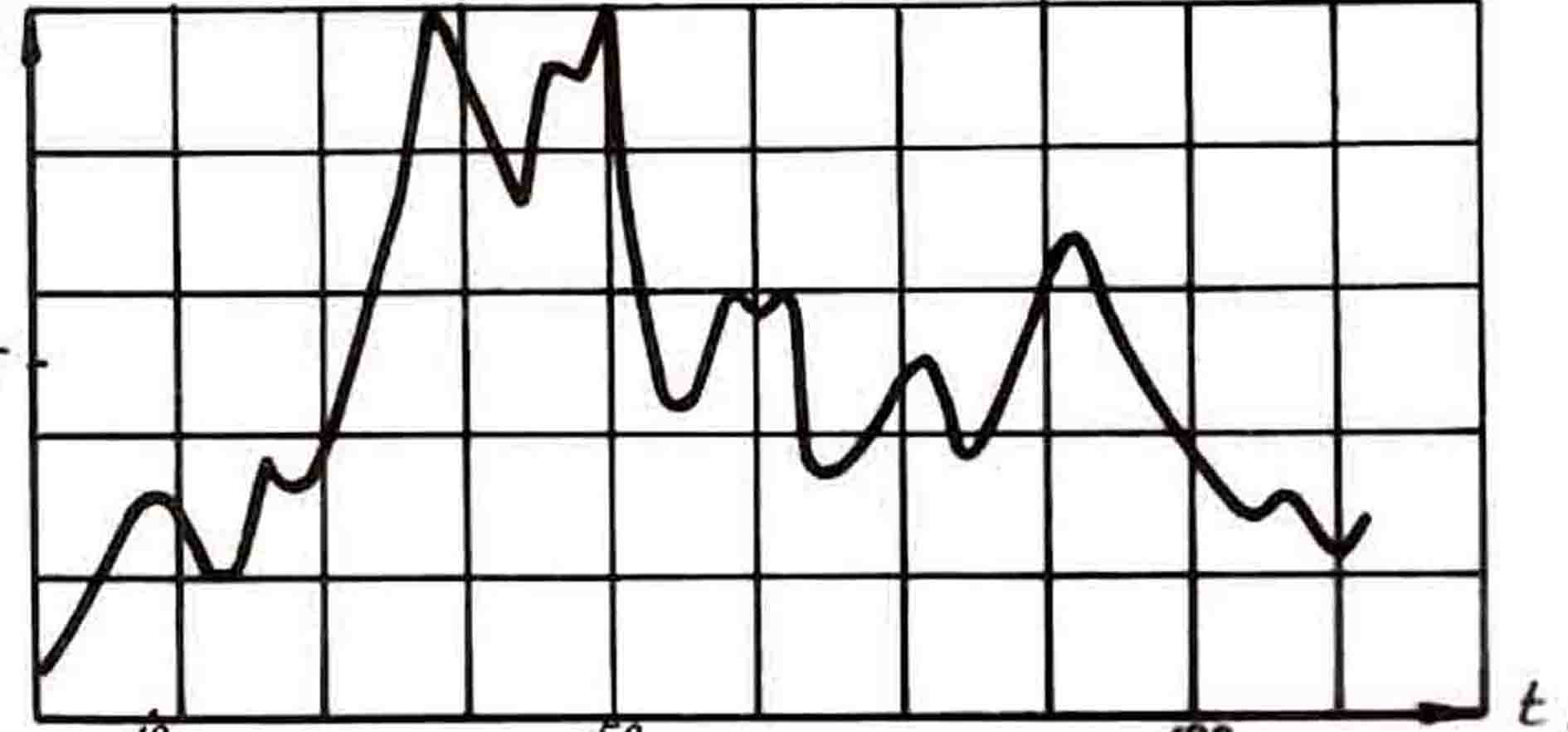
На рисунке 4.2.6 показана зависимость отклонения мгновенного значения частоты сигнала, приходящего в точку приема соответствующим рисунку 4.2.5 лучом, a на рисунке 4.2.7 приведена зависимость от времени модуля нормированного коэффициента передачи этого луча.
|
|
|

|
Рис. 4.2.3. Огибающие четырех импульсных реакций КВ канала связи, полученных последовательно во времени с периодом 90 с
|
Рис. 4.2.4. Огибающая импульсной реакции одного луча
с периодом обзора 3 с
|
Рис. 4.2.5. Пример зависимости от времени квадратур одного отсчета импульсной реакции
| Δf Гц |
| 0,067 |
| 0,053 |
| 0,04 |
| 0,027 |
| 0,013 |

|
| 0 50 100 с |
Рис. 4.2.6. Зависимость отклонения мгновенного значения частоты сигнала, приходящего в точку приема соответствующим
рисунку 4.2.5 лучом
|
| R |
| 0,8 |
| 0, 6 |
| 0,5 |
| 0,4 |
| 0,2 |
| 0 50 100 с |
Рис. 4.2.7. Зависимость от времени модуля нормированного коэффициента передачи луча, соответствующего рисунку 4.2.5
На разработанную систему наклонного зондирования ионосферы "Обрыв" были получены два авторских свидетельства на изобретение.
С помощью этой системы в течение 1967-1968 года исследовалась односкачковая трасса Ленинград-Омск.
В дальнейшем система "Обрыв" была передана для эксплуатации в Институт солнечно-земной физики СО РАН (г. Иркутск).
4.3. Физическое моделирование КВ канала связи
Существует достаточно большое число вариантов реализации физических моделей КВ каналов связи [24, 70, 84, 146]. В 1970г. в НЭИС под руководством Фалько А. И. по заказу Омского НИИ приборостроения для лабораторных испытаний систем связи были разработаны в двух экземплярах имитаторы КВ канала связи на магнитострикционных линиях задержки. Данные имитаторы учитывали результаты исследований ионосферы, полученные автором диссертации в ходе руководимой им НИР “Обрыв” [126].
Блок-схема имитатора КВ канала приведена на рисунке 4.3.1.
Имитатор имел три луча, разность хода между которыми можно было изменять путем коммутации в пределах 2-х мс с дискретностью 0,1 мс. В каждом из лучей имитировались рэлеевские и райсовские замирания. Амплитудно-фазовые модуляторы (АФМ) обеспечивали замирания сигнала по закону Рэлея. Интенсивность отдельных лучей регулировалась шестью аттенюаторами АТ. Аттенюаторы АТ1.1, АТ2.1 и АТ3.1 обеспечивали изменение стохастических составляющих лучей. Аттенюаторы АТ1.0, АТ2.0 и АТ3.0 позволяли регулировать уровни регулярной составляющей сигнала индивидуально и независимо в каждом луче и, тем самым, получать замирания по различным модификациям законов распределения Райса. В случае нулевого коэффициента передачи какого-либо из этих аттенюаторов в соответствующем луче имели место замирания по законам Рэлея. На рисунке 4.2.2 приведена блок-схема АФМ.
|
|
|
Каждый АФМ включает в себя два собственных генератора низкочастотного шума (ГНЧШ), которые содержат собственно генераторы шума (ГШ) и узкополосные фильтры низких частот (ФНЧ) с регулируемой полосой пропускания. ГНЧШ модулируют квадратуры гармонического колебания, имеющего частоту f. На выходе сумматора S имеет место колебание, у которого амплитуда изменяется по закону Рэлея, а фаза изменяется по равномерному закону. Это колебание поступает на перемножитель, на другой вход которого подается сигнал с одного из отводов линии задержки. На выходе перемножителя стоит полосовой фильтр ПФ на разностную частоту колебаний, поступающих на его входы. В результате с выхода
АФМ выдается радиосигнал, который замирает по закону Рэлея. Скорость замирания может регулироваться посредством изменения полосы пропускания ФНЧ ГНЧШ.
| Магнитострикционная ЛЗ |
| Коммутатор отводов ЛЗ |
| Луч № 1 |
| Луч № 2 |
| Луч № 3 |
| АФМ |
| АФМ |
| АФМ |
| АТ1.0 |
| АТ1.1 |
| АТ2.0 |
| АТ2.1 |
| АТ3.0 |
| АТ3.1 |
| Σ |
| uвых(t) |
| uвх(t) |
Рис. 4.3.1. Блок-схема физического имитатора КВ канала связи (ИКС)
| p/2 |
| Х |
| ФНЧ |
| ГШ |
| ГНЧШ |
| sin(2pft) |
| S |
| Х |
| От ЛЗ(n) |
| Х |
| ФНЧ |
| ГШ |
| ПФ |
| Вых. АФМ |
| ГНЧШ |
Рис. 4.3.2. Блок-схема амплитудно-фазового модулятора (АФМ)
одиночного луча.
Для учета аддитивных помех сигнал с выхода имитатора суммируется с сигналами, которые моделируют атмосферный шум и станционные помехи. С целью обеспечения условий, максимально приближенных к реальным, в качестве аддитивных помех можно использовать реальные помехи, принятые специальным приемником.
|
|
|
Блок-схема рабочего места для сравнительных испытаний модемов по вышеописанной методике приведена на рисунке 4.3.3.
| sin(2pft) |
| М |
| ИКС |
| fпч |
| АТТ |
| Σ |
| Вых. ПЧ |
| РПУ |
| АУ |
| ИС |
| ДМ |
| Вых. рез. |
| Аддитивные помехи |
Рис. 4.3.3. Блок-схема рабочего места для сравнительных испытаний модемов
От источника сообщения (ИС) сигнал подается на модулятор (М), и затем в виде радиосигнала с частотой f сообщение поступает на имитатор канала связи (ИКС). С выхода ИКС преобразованный в нем на частоту f пч замирающий радиосигнал через аттенюатор подается на вход сумматора, на второй вход которого подаются аддитивные помехи с выхода ПЧ РПУ, настроенного на заданную частоту.
Замирающий сигнал вместе с аддитивными помехами поступает на демодулятор (ДМ). Анализирующее устройство (АУ) сравнивает результат демодуляции с передаваемой информацией и регистрирует ошибки, которые происходят в результате замираний сигнала и воздействия аддитивных помех. С помощью аттенюатора (АТТ) можно имитировать работу систем связи с передатчиками, имеющими разный уровень мощности. РПУ настраивается на случайные частоты, на каждой из которых проводятся сеансы связи с помощью сравниваемых модемов при разных положениях аттенюатора. АУ автоматически определяет вероятность ошибок в сеансах связи. Таким образом, с помощью такого рода рабочего места для систем связи, использующих различные модемы, возможно в лабораторных условиях определять зависимости КИД КС от мощности используемых передатчиков и производить оценку энергетического выигрыша (проигрыша) модемов относительно друг друга.
В случае необходимости сравнения не только модемов, но и радиоприемных устройств в целом, необходимо воспользоваться блок-схемой, изображенной на рисунке 4.3.4, которая предусматривает преобразование сигнала с помощью возбудителя на частоту настройки исследуемого РПУ.
Замирающий сигнал с помощью возбудителя переносится с промежуточной частоты на частоту настройки РПУ и на приемной антенне автоматически суммируется с аддитивными помехами, существующими на данной частоте в эфире.
Упомянутый выше имитатор КВ канала использовался в течение многих лет для сравнительных испытаний различного рода новых разрабатываемых систем связи и дал большой экономический эффект за счет сокращения времени испытаний аппаратуры в условиях, максимально приближенных к реальным.
| Переизлучение сигнала с выхода возбудителя на вход РПУ |
| sin(2pft) |
| АТ |
| М |
| ИКС |
| В |
| Аддитивные помехи |
| ИС |
| УА |
| ДМ |
| РПУ |
| Вых. рез. |
| fпч |
|
|
|
Рис. 4.3.4. Блок-схема рабочего места для сравнительных испытаний
РПУ с использованием возбудителя, преобразующего частоту сигнала
4.4. Физическое моделирование воздействия на вход РПУ с использованием реальных гармонических радиосигналов
С целью экономии материальных средств и времени, а также скрытности испытаний, автором работы был предложен метод сравнительных испытаний систем связи с использованием гармонических колебаний от собственных или посторонних источников, например, станций точного времени.
В г. Москве и в г. Иркутске имеются КВ радиостанции, которые круглосуточно излучают радиосигналы на частотах 5,0 ± 0,004; 10 ± 0,004 и 15 ± 0,004 Мгц [154]. При этом с периодом 30 минут в течение 8 мин каждой радиостанцией излучается гармонический сигнал. В точке приема этот сигнал подвержен замираниям, характерным для КВ диапазона радиоволн, и при определенных условиях может быть использован для имитации воздействия на вход испытываемого РПУ [177]. Естественно, что в точке приема имеет место замирающий синусоидальный сигнал,
который представляет собой совокупность лучей, присутствующих в момент приема на данной трассе. Поэтому этот сигнал уже невозможно разделить по отдельным компонентам. Разность хода лучей в КВ канале связи в подавляющем большинстве случаев не превосходит величины 4 мс [126, 260 и др]. Для полной адекватности необходимо, чтобы скорость манипуляции в испытываемой системе связи была бы достаточно низкой и полоса спектра частот сигнала достаточно узкой, чтобы гарантировать отсутствие селективных замираний, что позволило бы канал связи считать однолучевым. С этой точки зрения максимальная скорость передачи не должна превышать 50 бод, а полоса частот спектра сигнала должна быть менее 200 Гц.. Таким образом, штатный вид работы ЧТ-125 и, тем более, используемый в системах с меньшей скоростью манипуляции вполне удовлетворяет предъявляемым требованиям. При выполнении вышеуказанных условий КВ система связи может быть подвергнута трассовым испытаниям с использованием рабочего места, схема которого приведена на рисунке 4.4.1.
Испытываемые элементы системы связи изображены на рисунке жирными линиями. Синусоидальный замирающий сигнал поступает на антенну приемного устройства, настроенного на частоту соответствующей станции точного времени. На выходе приемника находится узкополосный фильтр (УПФ) промежуточной частоты, который обеспечивает максимальную чувствительность всего приемного тракта. С выхода УПФ сигнал поступает на манипулятор испытываемой системы связи. С помощью возбудителя манипулированный замирающий сигнал переносится на случайную частоту, на которую настраивается приемник испытываемой системы связи. В остальном методика проведения испытаний полностью совпадает с методикой, описанной в предыдущем параграфе.
Данный метод испытаний получил название “ЭКВИВАЛЕНТ” и многократно использовался при проведении НИР и ОКР по разработке высоконадежных низкоскоростных и скрытных систем связи в Омском НИИ приборостроения. Частные результаты испытаний систем связи были опубликованы [115]. На метод испытаний "ЭКВИВАЛЕНТ" получено авторское свидетельство на изобретение.
| УПФ |
| Сигнал московской станции точного времени |
| РПУ |
| Сигнал иркуткой станции точного времени |
| Переизлучение сигнала с выхода возбудителя на вход РПУ |
| ИС |
| М |
| ДМ |
| РПУ |
| АТ |
| В |
| УА |
| Аддитивные помехи |
| Вых. рез. |
Рис. 4.4.1. Блок-схема рабочего места в г. Омске для сравнительных трассовых испытаний КВ систем связи с использованием сигналов московской и иркутской станций точного времени.
4.5. Имитационная модель канала связи с использованием результатов трассовых испытаний
Для усовершенствования алгоритмов обработки радиосигналов иногда используют имитационные модели, полученные на реальных трассах посредством регистрации конкретно сложившейся ситуации в условиях проводимых испытаний системы связи.
На первых этапах, когда средства вычислительной техники еще не нашли столь широкого применения из-за своего несовершенства, имели место попытки записи сигналов в аналоговом виде с помощью магнитофонных устройств. Однако этот способ не нашел широкого применения из-за больших недостатков, заключающихся в нестабильности работы магнитофона, вносящего собственные существенные искажения в воспроизводимые им сигналы.
На следующем этапе в конце 1960-х годов при непосредственном участии автора диссертации в качестве научного руководителя НИР “Обрыв” [126] была использована не аналоговая, а цифровая запись сигналов с использованием специальной магнитозаписывающей аппаратуры “Терек”, позволяющей в цифровой
форме регистрировать сигнал с полосой спектра частот 3 кГц. Принимаемый сигнал
преобразовывался на низкую частоту (с “нулевой” несущей) и представлялся в виде двух квадратур, которые давали возможность сохранить информацию как об амплитуде сигнала, так и о его фазе. Отсчеты, взятые из квадратур сигнала, превращались в цифровую форму и фиксировались с помощью магнитозаписывающей аппаратуры “Терек”. В дальнейшем с помощью ЦАП имелась возможность воспроизведения сигнала в первоначальном виде и использования его в качестве имитационного для ввода в испытываемую аппаратуру. Однако из-за технической сложности данное оборудование нашло лишь временное частное применение у конкретного заказчика и не было широко внедрено в производство.
В дальнейшем, с появлением быстродействующих ПЭВМ, стало возможным обеспечение регистрации параметров сигнала (отсчетов квадратур) в ходе проведения испытаний на относительно простом оборудовании.
При реализации описываемого метода необходимо обеспечивать высокую стабильность работы аппаратуры, которая формирует отсчеты квадратур принимаемого сигнала. Поскольку данную проблему можно считать успешно решенной проектировщиками блоков цифровой обработки сигналов, то в настоящее время нет практически никаких серьезных проблем, препятствующих реализации имитаторов сигналов с использованием результатов трассовых испытаний.
Недостатком данного метода имитации сигналов, как уже говорилось, является то, что он дает возможность использовать имеющиеся модели только для тех видов сигналов, которые испытывались на реальной трассе. Однако имитационные модели сигналов, полученные на реальной трассе, имеют очень большое значение для оптимизации алгоритмов обработки данных конкретных видов сигналов. Кроме того, такого рода модели необходимы для идентификации параметров различного рода математических моделей [275].
4.6. Компьютерная имитационная модель двухмерного КС для
усилительных трактов РПУ и устройств цифовой обработки сигналов
Хотя имитационное компьютерное моделирование требует во много раз больших временных затрат машинного времени по сравнению с аналитическим моделированием, оно имеет неоспоримое преимущество перед ним в том, что позволяет использовать для аппроксимации ПХ усилительных трактов любого рода аппроксимирующие функции, например, функцию arctg(x) или кусочно-линейную функцию. Кроме того, в последнее время современные приемные устройства всех типов невозможно представить без устройств цифровой обработки сигналов (УЦОС), для которых требуется преобразование сигнала в цифровую форму. Эта операция автоматически осуществляется в имитационной компьютерной модели. Имитируя на современных ЭВМ радиосигнал в цифровой форме, можно реализовать любой алгоритм его цифровой обработки, который ничем практически не будет отличаться от алгоритма, реализованного в УЦОС РПУ.
Имитационная модель двухмерного КВ КС формирует отсчеты квадратур колебания, адекватные отсчетам квадратур напряжения на выходе тракта промежуточной частоты радиоприемного устройства [48]. Это соответствует векторному представлению колебания на комплексной плоскости. Так как КВ канал в общем случае является многолучевым, то результирующий вектор представляет собой сумму векторов сигнала, каждый из которых соответствует собственному индивидуальному лучу, а также сумму векторов атмосферного шума и станционных помех. Модуль и фаза шумового компонента изменяется по нормальному случайному закону. Модули и фазы сигнала и станционных помех изменяются как по закону модуляции, так и по случайному закону, обусловленному условиями распространения в канале связи. Таким образом, каждый из компонентов колебания может быть представлен в виде последовательности отсчетов проекций вектора на оси декартовой системы координат. Результирующий вектор, представляющий собой сумму векторов, имеет проекции на оси координат, равные сумме соответствующих проекций отдельных компонентов. При формировании отсчетов квадратур каждого из компонентов необходимо задавать между этими отсчетами
интервал времени, который не может быть больше величины, обратной удвоенной полосе пропускания тракта промежуточной частоты приемного устройства. В УЦОС, как правило, используются квадратурные выборки сигнала, и необходимость в формировании радиосигнала на выходе имитатора на высокой частоте отпадает.
Квадратуры передаваемого сообщения в общем случае описываются выражениями:
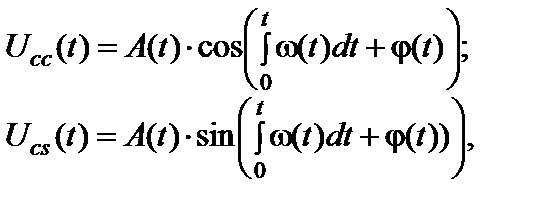 (4.6.1)
(4.6.1)
где A (t) - амплитуда передаваемого сигнала,
w(t) - мгновенная разность между частотой передаваемого сигнала и номинальной частотой несущего колебания;
j(t) - начальная фаза передаваемого сигнала.
В соответствии с этим, отсчеты квадратур передаваемого сообщения, которые поступают на вход модели канала связи, имеют следующий вид:
 (4.6.2)
(4.6.2)
где по сравнению с выражениями (4.6.1) знак интеграла заменен знаком суммы, а значение D t является конечным интервалом времени между любыми соседними отсчетами квадратур.
В данной модели основные параметры канала связи (параметры лучей, уровни сигнала и помех и т.д.) формируются аналогично тому, как это описано в первой главе. Поэтому ниже внимание уделено лишь тем фрагментам модели, которые представляют собой новизну, связанную с особенностями формирования отсчетов
квадратур сигнала, шума и станционных помех на выходе тракта промежуточной частоты приемного устройства.
Отсчеты квадратур сигнала, пришедшего в точку приема i -м лучом, могут быть описаны в виде уравнений:
 (4.6.3)
(4.6.3)
где A i(nDt) - значение в (nDt)-ый момент времени амплитуды сигнала, пришедшего в точку приема i -м лучом,
wi(lDt) - значение в (lDt)-ый момент времени мгновенной разности между частотой сигнала, пришедшего в точку приема i -м лучом, и номинальной частотой несущего колебания,
ji(nDt) - значение в (nDt)-ый момент времени начальной фазы сигнала, пришедшего в точку приема i -м лучом.
В свою очередь, отсчеты амплитуды сигнала, который приходит в точку приема i -м лучом могут быть описаны выражением:
A i(nDt) = A (nDt-Dni) | μ i(nDt)|, (4.6.4)
где A (nDt) - закон изменения амплитуды сигнала на передающем конце радиолинии,
| μ i(nDt)| - модуль коэффициента передачи i -го луча,
Dni - время задержки сигнала, приходящего в точку приема i -м лучом.
Значения в (nDt)-ые моменты времени мгновенной разности между частотой сигнала, пришедшим в точку приема i -м лучом, и номинальной частотой несущего колебания можно описать выражением:
wi(nDt) = w(nDt-Dni) + Dwi(nDt), (4.6.5)
где w(nDt) - закон изменения частоты сигнала на передающем конце радиолинии относительно номинала несущей,
|
|
|
