 |


4.8 Условия и особенности выполнения снижения по наклонной траектории
|
|
|
|
4. 8 Условия и особенности выполнения снижения по наклонной траектории
Для перевода вертолета из ГП на планирование необходимо уменьшить φ ОШ. Это приводит к разбалансировке вертолета, т. е. уменьшается МРнв, что влечет за собой разворот вертолета вправо, поэтому с уменьшением ОШ одновременно отклоняется левая педаль. Отклонение левой педали уменьшает ТРВ, вертолет стремится накрениться вправо, значит одновременно необходимо отклонить РУ влево. Заданные VУсн. и Vплан. сохранять координированными отклонениями всех органов управления.
Согласно Инструкции экипажу на высотах более 1500 м на вертолете МИ-8Т для исключения возможности выхода оборотов несущего винта за максимальные пределы (103% на время не более 30 с, 105% на время не более 5 с) общий шаг на планировании должен быть не менее 3–4° по УШВ.
По мере уменьшения высоты полета для обеспечения вертикальной скорости допускается постепенное уменьшение общего шага вплоть до минимального значения с сохранением при этом оборотов несущего винта в допустимом диапазоне.
Рекомендуемые обороты несущего винта 92–96%.
Рекомендуемая скорость планирования на высотах менее 2000 м – 120–180 км/ч, вертикальная скорость при этом будет 3–5 м/с.
Допустимые скорости планирования:
Таблица 9
| Высота полета, м | Допустимая скорость планирования по прибору, км/ч, с работающими двигателями | |
| максимальная | минимальная | |
| 6000-3000 3000-2000 2000-0 | ||
На вертолете МИ-8МТ на планировании поддерживать обороты несущего винта в допустимых пределах изменением общего шага несущего винта. По мере уменьшения высоты полета для обеспечения вертикальной скорости допускается постепенное уменьшение общего шага вплоть до минимального значения с сохранением при этом оборотов несущего винта в допустимом диапазоне.
|
|
|
Рекомендуемые обороты несущего винта (95±2) %.
Рекомендуемая скорость планирования на высотах менее 2000 м 120—180 км/ч, вертикальная скорость при этом будет 3—5 м/с.
Допустимые скорости планирования:
Таблица 10
|
Высота, м |
При взлётном весе, кгс | |||
|
13 000 |
11 100 | |||
| максимальная | минимальная | максимальная | минимальная | |
| До 1000 | ||||
| - | - | |||
П р и м е ч а н и е. В случае возникновения колебаний оборотов турбокомпрессора на режимах, при которых возможно срабатывание клапана перепуска воздуха (КПВ), необходимо изменить (увеличить или уменьшить) режим работы двигателей с целью прекращения периодического открытия — закрытия клапанов.
Глава 5 Режимы вертикального полета вертолета
5. 1 Балансировка вертолета на режиме висения
Основные отличия от других летательных аппаратов (кроме самолетов ВВП) заключаются в возможности выполнения вертикальных режимов полета: висения, вертикального набора высоты и вертикального снижения. При этом сохраняется условие VПОЛ. = 0 с выдерживанием места относительно земли. По технике пилотирования эти режимы являются наиболее сложными для летчика, требуют повышенного внимания и физического напряжения.
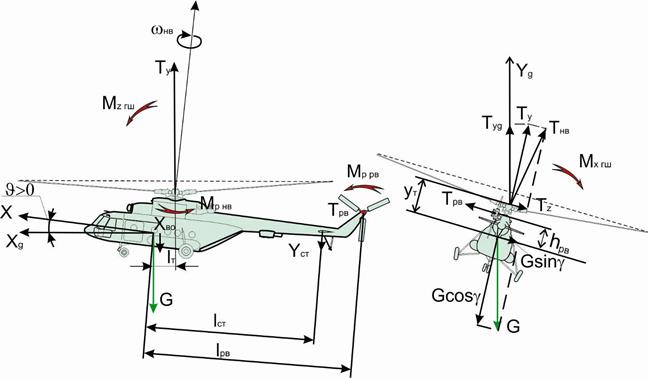
Рис. 93. Балансировка вертолета при вертикальных режимах полета
Рассмотрение вертикальных режимов начнем с режима висения. На рисунке 93 изображена схема сил и моментов, действующих на вертолет на режиме висения. Отметим, что эта схема справедлива для любого вертикального установившегося полета.
Вертолет выполняет режим висения даже при ХТ = 0 с положительным углом тангажа за счет предварительного наклона оси вала НВ на 4о30/ и тарелки автомата перекоса на 40/ вперед. Поэтому при нейтральном положении РУ (ХТ = 0) вертолет будет висеть с J > 0 (J = 5о10/). Увеличение или уменьшение центровки ХТ приводит к уменьшению или увеличению хода РУ для создания необходимого угла тангажа.
|
|
|
В поперечном отношении вертолет на режиме висения балансируется с правым креном ввиду разности плеч УТ > hРВ. Летчик добивается равенства сил ТZ + G·sin γ = ТРВ, чтобы не было смещения вертолета влево под действием силы ТРВ > ТZа; составляющую G·sinγ можно получить, накренив вертолет вправо. Используя рисунок 50, запишем условия установившегося режима висения Vпол. = 0:
∑ FXа = 0 (ТХ = 0) → отсутствие Vпол.; (5. 1)
∑ FУа = ТУа – G – XВО = 0 → условие VУ = 0, Н = const; (5. 2)
∑ FZа = ТZа + G · sinγ – ТРВ = 0 → условие VZ = 0; (5. 3)
∑ MХ = ТZа · УТ + МХ гш – ТРВ · hРВ = 0 → условие γ = const; (5. 4)
∑ МУ = МР НВ – ТРВ · lРВ = 0 → условие ψ = 0, МК = const; (5. 5)
∑ МZ = Тнв · lТ –MZгш + МРрв + YСТ · lСТ = 0 → условие J = const. (5. 6)
5. 2 Потребные и располагаемые тяги и мощности на режиме висения
5. 2. 1 Потребная и располагаемая тяги НВ на режиме висения
Потребная тяга на режиме висения затрачивается на создание подъемной силы НВ ТУ = G и соответствующей тяги НВ → ТZ = ТРВ, тогда
 . (5. 7)
. (5. 7)
Учитывая, что величина ТРВ зависит от GВЗЛ, получим. Тпотр. вис. = f(G)
Тпотр. вис. можно определить по известной формуле
 . (5. 8)
. (5. 8)
Из выражения (5. 8) следует, что при данном диаметре НВ и постоянных оборотах потребная тяга будет зависеть от величины коэффициента тяги СТ и плотности воздуха. При уменьшении плотности воздуха (увеличении высоты висения) для сохранения равенства ТУ = G летчику приходится увеличивать φ ош, что приводит к увеличению СТ пропорционально уменьшению плотности. Тпотр. вис. в этом случае не изменится.
Если высота висения не изменяется (ρ = const), а меняется GВЗЛ. , происходит изменение величины Тпотр. вис. , так как уменьшение GВЗЛ вызывает уменьшение φ ОШ (↓ СТ), а увеличение Gвзл. → ↑ φ ОШ (↑ СТ).
|
|
|
Увеличение полетной массы вертолета приводит к уменьшению статического потолка вертолета. НСТ уменьшается и при увеличении температуры наружного воздуха. Существенное влияние на тягу несущего винта на режиме висения оказывает расстояние от НВ до поверхности земли. Возникает эффект «воздушной подушки».
Влияние эффекта «воздушной подушки» на тягу НВ оценивается по эмпирической формуле
 (5. 9)
(5. 9)
где
- ТСВ – «свободная» тяга, создаваемая НВ вне зоны влияния «воздушной подушки»;
- h – расстояние от поверхности земли до основных колес вертолета;
- DНВ – диаметр несущего винта.
Зависимость ТСВ = f (Н) показана на рисунке 94. Для Ми-8Т ТСВ = 11250 кгс при работе двигателей на взлетном режиме в стандартных условиях, т. е. при взлетной массе вертолета 11100 кг выполняется висение вне зоны «воздушной подушки».

|
|
|
