 |


Асинхронный вентильный каскад
|
|
|
|
В электромеханических системах, где применяется асинхронный двигатель с фазным ротором, возможно регулирование частоты вращения изменением сопротивления дополнительного резистора  , включенного в роторную цепь. Однако регулирование частоты вращения сопровождается выделением в роторной цепи потерь мощности, пропорциональных скольжению. Поэтому этот способ не является экономичным. Потери мощности в роторе могут составить ощутимое значение. Пусть диапазон регулирования частоты вращения
, включенного в роторную цепь. Однако регулирование частоты вращения сопровождается выделением в роторной цепи потерь мощности, пропорциональных скольжению. Поэтому этот способ не является экономичным. Потери мощности в роторе могут составить ощутимое значение. Пусть диапазон регулирования частоты вращения
D = 2: 1, момент электродвигателя постоянен и равен номинальному. Тогда при скольжении s = 0,5, что соответствует половине синхронной частоты вращения, потери мощности в роторе:
 (5.53)
(5.53)
где принято, что 
Таким образом, потери мощности могут составлять половину номинальной мощности электродвигателя  . При увеличении диапазона регулирования скорости эти потери возрастают еще больше. В общем случае при скольжении электромагнитная мощность передается на вал ротора с КПД, равным 1 - s,а полный КПД двигателя оказывается меньше этого значения. При низких угловых скоростях электромагнитная мощность почти полностью рассеивается в цепи ротора, поэтому КПД двигателя в этом случае имеет очень малое значение. Таким образом, регулирование скорости в широком диапазоне изменением сопротивления ротора связано с большими потерями. Реализовать непосредственно энергию скольжения асинхронного двигателя затруднительно, так как частота В роторной цепи отлична от частоты питающей сети. Однако при некоторых технических решениях это возможно. Первые схемы, позволяющие использовать энергию скольжения асинхронного двигателя, создавались путем специального соединения асинхронного двигателя с другими электрическими машинами. Поэтому они назывались каскадными. Вентильные преобразователи позволили создавать каскадные схемы без вращающихся электрических машин.
. При увеличении диапазона регулирования скорости эти потери возрастают еще больше. В общем случае при скольжении электромагнитная мощность передается на вал ротора с КПД, равным 1 - s,а полный КПД двигателя оказывается меньше этого значения. При низких угловых скоростях электромагнитная мощность почти полностью рассеивается в цепи ротора, поэтому КПД двигателя в этом случае имеет очень малое значение. Таким образом, регулирование скорости в широком диапазоне изменением сопротивления ротора связано с большими потерями. Реализовать непосредственно энергию скольжения асинхронного двигателя затруднительно, так как частота В роторной цепи отлична от частоты питающей сети. Однако при некоторых технических решениях это возможно. Первые схемы, позволяющие использовать энергию скольжения асинхронного двигателя, создавались путем специального соединения асинхронного двигателя с другими электрическими машинами. Поэтому они назывались каскадными. Вентильные преобразователи позволили создавать каскадные схемы без вращающихся электрических машин.
Каскадными называют такие схемы включения асинхронного двигателя, которые позволяют использовать энергию скольжения путем отдачи ее в сеть или превращения ее в механическую энергию, передаваемую на вал главного двигателя [17].
Существуют две принципиально различные группы схем каскадов. В первой из них, как показано на рис. 5.23 на вход преобразователя Пр поступает энергия скольжения частоты  с колец АД, а выход преобразователя, характеризующийся напряжением
с колец АД, а выход преобразователя, характеризующийся напряжением  и частотой сети
и частотой сети  , соединен с питающей сетью. В каскадах этой группы энергия скольжения
, соединен с питающей сетью. В каскадах этой группы энергия скольжения  за вычетом потерь энергии непосредственно в обмотке ротора АД и элементах преобразователя Пр
за вычетом потерь энергии непосредственно в обмотке ротора АД и элементах преобразователя Пр  +
+ 
|
|
|
возвращается в питающую сеть, что иллюстрируется энергетической диаграммой на рис.5.23, б. Между элементами преобразователя и асинхронным двигателем в схеме на рис.5.23, а, а имеется только электрическое соединение. Такие каскадные установки называются электрическими. На рис. 5.23, а приведена принципиальная схема каскадных установок другого типа. Энергия скольжения в каскадах этой группы поступает на вход преобразователя. Преобразователь на выходе создает напряжение  которое подается на зажимы вспомогательного двигателя ВД. Последний преобразует электрическую энергию, поступающую от преобразователя в механическую, которая возвращается на вал АД, поскольку валы АД и ВД соединены.
которое подается на зажимы вспомогательного двигателя ВД. Последний преобразует электрическую энергию, поступающую от преобразователя в механическую, которая возвращается на вал АД, поскольку валы АД и ВД соединены.
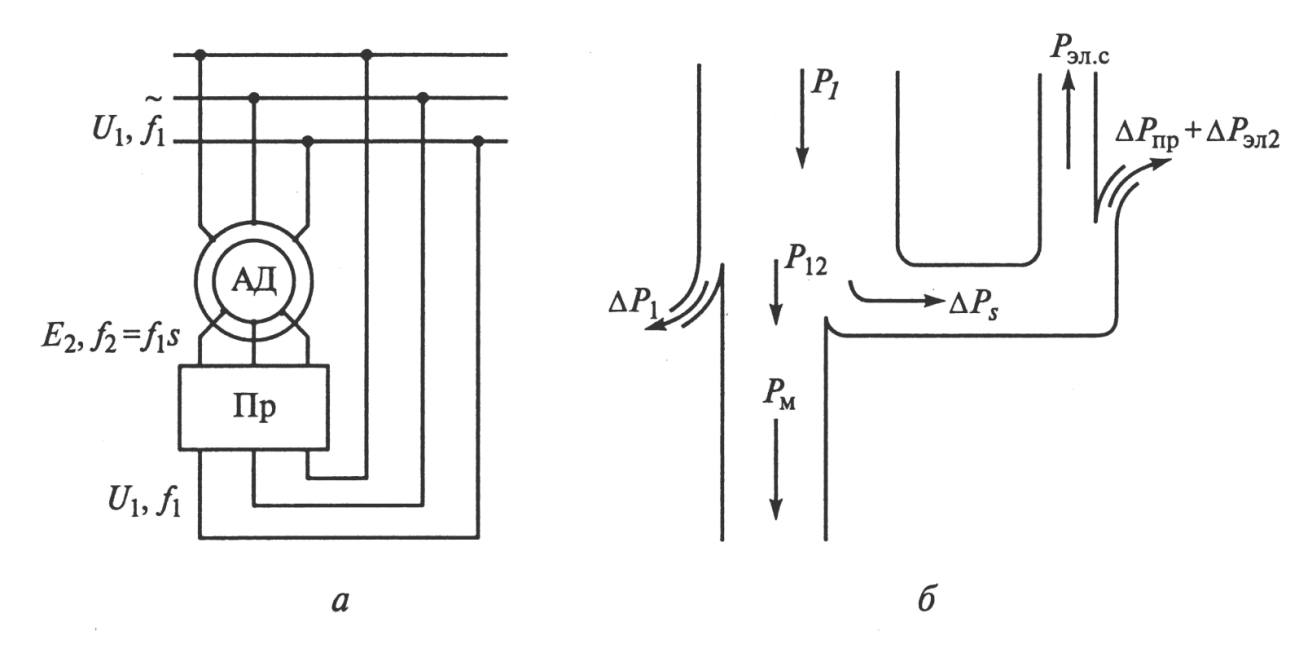
Рис. 5.23. Электрический асинхронный каскад: а - принципиальная схема; б - энергетическая диаграмма.
Если пренебречь потерями в двигателях каскада, то становится очевидным, что на вал каскадной установки от АД поступает механическая мощность  , а от ВД - электромагнитная мощность
, а от ВД - электромагнитная мощность  = M
= M  .
.
Суммарная механическая мощность на валу каскада
|
|
|
 (5.54)
(5.54)
Таким образом, механическая мощность на валу этого каскада примерно равна электромагнитной мощности, передаваемой со статора на ротор асинхронного двигателя. Из рис.5.24, а видно, что элементы преобразователя соединены с АД как электрическим (вход Пр - кольца АД), так и механическим путями (вал ротора ВД - вал ротора АД). Поэтому такие каскады называются электромеханическими. Приведенная на рис.5.24, б энергетическая диаграмма характеризует последовательность преобразования энергии электромеханического каскада.

Рис.5.24. Электромеханический асинхронный каскад:
а - принципиальная схема; б – энергетическая диаграмма.
Таким образом, в качестве АД может быть использован только асинхронный двигатель с фазным ротором, который называется главным приводным двигателем. Момент на валу электрического каскада равен моменту только АД, а момент на валу электромеханического каскада равен сумме моментов АД и ВД.
Асинхронные каскады работают за счет введения в цепь ротора АД добавочной ЭДС, с помощью которой можно регулировать угловую частоту вращения двигателя. Покажем, каким образом это возможно. Положим, что АД работает в двигательном режиме, потребляя электрическую энергию из питающей сети переменною тока и отдавая энергию скольжения в роторную цепь. Пусть к валу электродвигателя приложен статический момент  , не зависящий от частоты вращения. Если добавочная ЭДС в роторной цепи
, не зависящий от частоты вращения. Если добавочная ЭДС в роторной цепи  = 0, то ток ротора определяется только ЭДС роторной обмотки и ее параметрами. При введении в цепь ротора часть энергии скольжения потребляется источником ЭДС, а количество электрической энергии, выделяемой непосредственно в обмотке ротора, уменьшается. Это приводит к уменьшению тока ротора согласно выражению
= 0, то ток ротора определяется только ЭДС роторной обмотки и ее параметрами. При введении в цепь ротора часть энергии скольжения потребляется источником ЭДС, а количество электрической энергии, выделяемой непосредственно в обмотке ротора, уменьшается. Это приводит к уменьшению тока ротора согласно выражению
 (5.55)
(5.55)
Снижение тока ротора определяет уменьшение электромагнитного момента двигателя, который становится меньше статического момента нагрузки, и двигатель начинает замедляться. Но при уменьшении частоты вращения увеличивается скольжение, а значит, и ЭДС ротора, так как =  s (где - ЭДС в неподвижном роторе). Увеличение
s (где - ЭДС в неподвижном роторе). Увеличение  приводит к увеличению тока
приводит к увеличению тока  и момента АД. Когда момент каскадной установки вновь становится равным статическому моменту
и момента АД. Когда момент каскадной установки вновь становится равным статическому моменту  двигатель перестает замедляться и снова работает в установившемся режиме, но уже при более низкой частоте вращения.
двигатель перестает замедляться и снова работает в установившемся режиме, но уже при более низкой частоте вращения.
При увеличении добавочной ЭДС ротора угловая скорость двигателя уменьшается, а при уменьшении - увеличивается. При = 0 АД работает на механической характеристике, близкой
|
|
|
к естественной.
Современные каскадные схемы, как правило, построены на использовании статических полупроводниковых преобразователей.
На рис.5. 25 приведена схема асинхронною вентильного каскада (АВК). Для преобразования постоянного тока в переменный в нем использован инвертор И, состоящий из управляемых тиристоров. Для согласования напряжения ротора двигателя с напряжением сети служит трансформатор Т. Добавочной ЭДС, вносимой в цепь выпрямленного тока ротора АД в данном случае является ЭДС инвертора, которая регулируется изменением угла опережения открывания тиристоров  . Ток ротора двигателя АД выпрямляется трехфазным мостовым выпрямителем В. для сглаживания пульсаций выпрямленного тока в схему включен реактор L. При работе АВК мощность скольжения с ротора АД через выпрямитель и инвертор поступает обратно в электрическую сеть, где она полезно используется. Регулирование ЭДС инвертора приводит к изменению потока энергии от ротора АД в сеть и, как следствие, к изменению частоты вращения электропривода. В соответствии со схемой замещения (рис.5.25, б) для цепи выпрямленного тока ротора можно записать
. Ток ротора двигателя АД выпрямляется трехфазным мостовым выпрямителем В. для сглаживания пульсаций выпрямленного тока в схему включен реактор L. При работе АВК мощность скольжения с ротора АД через выпрямитель и инвертор поступает обратно в электрическую сеть, где она полезно используется. Регулирование ЭДС инвертора приводит к изменению потока энергии от ротора АД в сеть и, как следствие, к изменению частоты вращения электропривода. В соответствии со схемой замещения (рис.5.25, б) для цепи выпрямленного тока ротора можно записать
 (5.56)
(5.56)
где  =
=  - ЭДС трехфазного мостового выпрямителя;
- ЭДС трехфазного мостового выпрямителя;
 - действующее значение линейной ЭДС на кольцах неподвижного ротора АД (s = 1);
- действующее значение линейной ЭДС на кольцах неподвижного ротора АД (s = 1);  =
=  - ЭДС трехфазного мостового инвертора;
- ЭДС трехфазного мостового инвертора;  - действующее значение вторичного линейного напряжения трансформатора;
- действующее значение вторичного линейного напряжения трансформатора;  - угол опережения инвертора;
- угол опережения инвертора;  и
и  - падение напряжения соответственно в диодах выпрямителя и тиристорах инвертора;
- падение напряжения соответственно в диодах выпрямителя и тиристорах инвертора;  - выпрямленный ток;
- выпрямленный ток;  - эквивалентное сопротивление цепи выпрямленного тока
- эквивалентное сопротивление цепи выпрямленного тока
 (5.57)
(5.57)
где 
 - индуктивные сопротивления фазы ротора АД и трансформатора Т;
- индуктивные сопротивления фазы ротора АД и трансформатора Т;  - активные сопротивления фазы ротора АД, трансформатора и сглаживающего реактора.
- активные сопротивления фазы ротора АД, трансформатора и сглаживающего реактора. 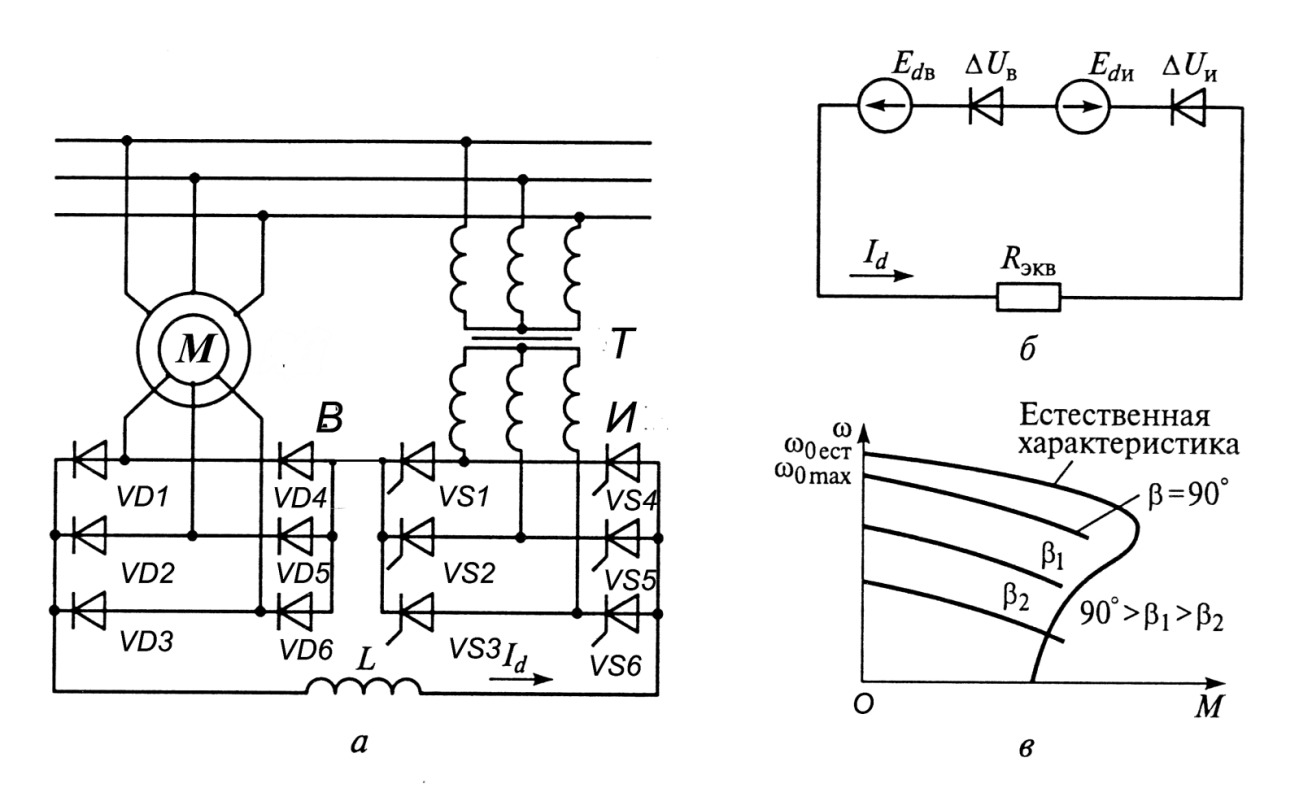
|
|
|
Рис.5.25. Асинхронный вентильный каскад.
Выпрямленный ток
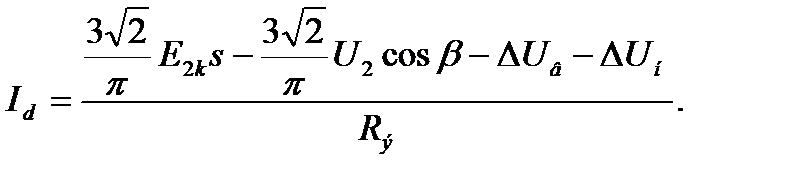 (5.58)
(5.58)
Момент, развиваемый асинхронным двигателем, примерно пропорционален выпрямленному току ротора. Следовательно, регулирование последнего изменением ЭДС инвертора позволяет регулировать момент и частоту вращения двигателя.
Если выпрямленная ЭДС инвертора равна выпрямленному напряжению ротора двигателя, то ток в цепи ротора и момент, развиваемый двигателем, равны нулю.
При уменьшении ЭДС инвертора ток в цепи ротора возрастает, момент двигателя увеличивается, и частота вращения повышается. Так как с увеличением частоты вращения скольжение s и ЭДС трехфазного мостового выпрямителя уменьшаются, то ускорение двигателя происходит до тех пор, пока момент двигателя не становится равным моменту нагрузки.
При увеличении ЭДС инвертора ток ротора и момент уменьшаются, и частота вращения двигателя снижается. По мере уменьшения частоты вращения повышается выпрямленное напряжение ротора. Ток ротора и момент двигателя увеличиваются до тех пор, пока момент, развиваемый двигателем, снова не становится равным статическому моменту сопротивления. При этом двигатель начинает работать в установившемся режиме с новым значением частоты
вращения (скольжения).
При постоянстве управляющего воздействия и изменении момента нагрузки на валу переходный процесс протекает аналогично изложенному. Например, при увеличении момента на валу двигателя частота вращения снижается, вследствие этого возрастает ЭДС ротора и, следовательно, увеличивается выпрямленный ток и момент двигателя до тех пор, пока момент двигателя не становится равным моменту сопротивления на его валу.
В режиме холостого хода момент на валу двигателя и ток ротора равны нулю. Поэтому должны быть взаимно уравновешены выпрямленные напряжения в выражении (5.56), т. е.
 (5.59)
(5.59)
где  - коэффициент трансформации асинхронного двигателя.
- коэффициент трансформации асинхронного двигателя.
Если = 1, то частота вращения холостого хода двигателя можно регулировать до номинального значения.
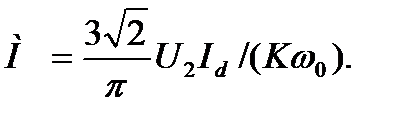
Чтобы двигатель развивал момент, в цепи ротора должен протекать ток, при этом выпрямленное напряжение ротора должно обеспечить протекание этого тока навстречу ЭДС инвертора. Это достигается за счет некоторого снижения угловой скорости двигателя при увеличении нагрузки, что приводит к соответствующему увеличению напряжения и тока ротора. При малом сопротивлении ротора мощность скольжения Р s, определяемая первыми гармониками тока и напряжения, примерно равна мощности в цепи выпрямленного тока
 (5.60)
(5.60)
Учитывая, что  = М
= М  , можно получить
, можно получить
 (5.61)
(5.61)
Если не учитывать падение частоты вращения при нагрузке, то полученное соотношение можно подставить в формулу (5.59), справедливую для скольжения при холостом ходе двигателя. Используя зависимость для ЭДС инвертора, получим:
|
|
|
 (5.62)
(5.62)
Следовательно, момент в установившемся режиме пропорционален выпрямленному току ротора  , который, в свою очередь, линейно зависит от разности выпрямленной ЭДС выпрямителя и ЭДС инвертора. На рис. 5.25, в показан примерный вид механических характеристик АВК. Меньшая жесткость характеристик АВК по сравнению с естественной характеристикой асинхронного электродвигателя объясняется дополнительными падениями напряжения в выпрямителе, инверторе, трансформаторе, что учитывается эквивалентным сопротивлением
, который, в свою очередь, линейно зависит от разности выпрямленной ЭДС выпрямителя и ЭДС инвертора. На рис. 5.25, в показан примерный вид механических характеристик АВК. Меньшая жесткость характеристик АВК по сравнению с естественной характеристикой асинхронного электродвигателя объясняется дополнительными падениями напряжения в выпрямителе, инверторе, трансформаторе, что учитывается эквивалентным сопротивлением  .
.
Представленная схема АВК обеспечивает двигательный режим работы при скорости ниже синхронной; частота вращения двигателя плавно регулируется вниз от естественной характеристики. Пуск асинхронного двигателя в схеме АВК - резисторный. Ротор при пуске отсоединяется от выпрямителя и подключается к пусковому резистору. После достижения номинальной скорости ротор асинхронного двигателя подключается к выпрямителю. для торможения в приведенной схеме АВК используется динамическое торможение.
Принципиальным недостатком АВК является его низкий коэффициент мощности. Если схема рассчитана для регулирования скорости в широком диапазоне, то при номинальной нагрузке и максимальной скорости коэффициент мощности не может быть более 0,5, уменьшаясь до 0,3 и меньше при снижении угловой скорости. Низкий коэффициент мощности частично вызван потреблением дополнительной реактивной мощности, необходимой для коммутации тиристоров выпрямительного моста в цепи ротора.
Реактивная мощность, потребляемая инвертором, тоже снижает общий коэффициент мощности системы. Среднее значение ЭДС инвертора максимально при наименьшей угловой частоты вращения двигателя. Максимальной ЭДС в идеальном случае соответствует угол управления, равный 180°, однако в действительности по причине процессов коммутации и запаса на восстановление запирающих свойств тиристоров он несколько меньше 180°. Это приводит к тому, что токи на выходе инвертора опережают соответствующие фазные напряжения, т. е. инвертор работает как генератор опережающей реактивной мощности или как потребитель отстающей реактивной мощности.
Потребление реактивной мощности увеличивается по мере уменьшения угла управления, которое производится с целью снижения ЭДС инвертора и скольжения двигателя. При полной угловой скорости угол управления равен 90°, и кажущаяся мощность инвертора почти полностью реактивная. Для любого значения угла управления активная мощность каскада равна разности соответствующих мощностей, потребляемой двигателем и возвращаемой в сеть инвертором. В то же время полная реактивная мощность состоит из суммы реактивных мощностей двигателя и инвертора, поэтому коэффициент мощности каскада падает со снижением скорости, так как потребление активной мощности при этом уменьшается.
Каскадные схемы включения асинхронных двигателей целесообразно использовать для двигателей большой мощности, где необходима реализация мощности скольжения, которая может составлять несколько тысяч киловатт. Для уникальных регулируемых электромеханических систем мощность двигателя может достигать 20... 30 тыс, кВт. В этих случаях применение каскадных установок может быть единственно возможным техническим решением.
В то же время применение современных средств преобразовательной техники позволяет создавать каскадные электромеханические системы с хорошими регулировочными свойствами, удовлетворяющими требованиям многих производственных механизмов. Тогда становится оправданным их применение и для двигателей меньшей мощности.
Объем и стоимость оборудования каскадных схем находится в прямой зависимости от диапазона регулирования. Поэтому наиболее выгодно применять АВК при неглубоком регулировании скорости, когда диапазон регулирования не превышает значения D = 2:1. АВК применяют в системах мощных вентиляторов, насосов, компрессоров.
Глава 6.
|
|
|
